Você também pode gostar
- Ebook Rede CanDocumento16 páginasEbook Rede CanTiago Da Silva MachadoAinda não há avaliações
- Projeto De Hardware Rede Can Com Desenho De Esquema E Layout No KicadNo EverandProjeto De Hardware Rede Can Com Desenho De Esquema E Layout No KicadAinda não há avaliações
- Sensores SimuladorsinaisDocumento77 páginasSensores SimuladorsinaisCarlos AndradeAinda não há avaliações
- TESTES MECÂNICOS SINAIS ELÉTRICOS CONFIGURAÇÕES. 1 Sinal Sonda Lâmbda Catalizador Visto Por Sinal de Duas Sondas. 2 Primário de Bobina IgniçãoDocumento30 páginasTESTES MECÂNICOS SINAIS ELÉTRICOS CONFIGURAÇÕES. 1 Sinal Sonda Lâmbda Catalizador Visto Por Sinal de Duas Sondas. 2 Primário de Bobina IgniçãoVinicius Silveira100% (1)
- Reparo Modulos (21) 989163008 João PessoaDocumento20 páginasReparo Modulos (21) 989163008 João PessoaChip10 ModulosAinda não há avaliações
- Projetos Com Esp32 Programado Em Arduino - Parte ViiiNo EverandProjetos Com Esp32 Programado Em Arduino - Parte ViiiAinda não há avaliações
- Jovino TransdutoresDocumento38 páginasJovino TransdutoresArizio Amorim Rocha Junior100% (2)
- Rede CAN Bus de Dados PDFDocumento4 páginasRede CAN Bus de Dados PDFferanba0% (1)
- Injecao Eletrica MotorDocumento256 páginasInjecao Eletrica MotorLESTE CHAVES AUTO PEÇASAinda não há avaliações
- Revista O Mecânico Sistema de Injeção Direta Do VW Passat - Revista O MecânicoDocumento11 páginasRevista O Mecânico Sistema de Injeção Direta Do VW Passat - Revista O MecânicoJorge Petersen100% (1)
- Módulos de Conforto - Portal Revista AutoMOTIVODocumento3 páginasMódulos de Conforto - Portal Revista AutoMOTIVOAnderson SouzaAinda não há avaliações
- Aprenda Solidworks do zeroDocumento12 páginasAprenda Solidworks do zeroEder Medeiros100% (1)
- Eletrônica GeralNo EverandEletrônica GeralAinda não há avaliações
- Sondas lambda Bosch: qualidade e economia de combustívelDocumento8 páginasSondas lambda Bosch: qualidade e economia de combustívelWillian OliveiraAinda não há avaliações
- Diagnóstico completo resolve caso difícil de FIAT FreemontDocumento54 páginasDiagnóstico completo resolve caso difícil de FIAT FreemontCarlos Eduardo Vieira100% (1)
- Rede CanDocumento144 páginasRede CanRomenesAinda não há avaliações
- Tabela de Aplicação Linha LeveDocumento25 páginasTabela de Aplicação Linha LeveWalter Anderson AndersonAinda não há avaliações
- Funcionamento e diagnóstico do sensor de rotação e PMS/CKPDocumento13 páginasFuncionamento e diagnóstico do sensor de rotação e PMS/CKPJoão Vitor da Silva100% (1)
- Rede-CanDocumento6 páginasRede-CanThiago100% (1)
- Macetes Volume 2Documento49 páginasMacetes Volume 2RenanAinda não há avaliações
- Injeção Cfi PDFDocumento30 páginasInjeção Cfi PDFjuerliAinda não há avaliações
- A roda fônica: sensor digital que revolucionou a injeção eletrônicaDocumento9 páginasA roda fônica: sensor digital que revolucionou a injeção eletrônicaRuanWheeling50% (2)
- Enciclopédia de automática, v. 3: controle e automaçãoNo EverandEnciclopédia de automática, v. 3: controle e automaçãoAinda não há avaliações
- Desmistificando o sistema Start StopDocumento15 páginasDesmistificando o sistema Start StopandreAinda não há avaliações
- Estratégias de Funcionamento Da Centrais AutomotivasDocumento15 páginasEstratégias de Funcionamento Da Centrais AutomotivasAndeson & MaraAinda não há avaliações
- Os principais tipos de sensores veicularesDocumento15 páginasOs principais tipos de sensores veicularesHernani Garcia100% (2)
- Testes Com o OsciloscópioDocumento20 páginasTestes Com o OsciloscópioGabriel SantosAinda não há avaliações
- Testes Osciloscópio - Com Marcas de CorteDocumento30 páginasTestes Osciloscópio - Com Marcas de Corteandi_lb9453Ainda não há avaliações
- ECU HSFI 2.3 para Corsa e Montana 1.4 e 1.8 de 2007 a 2009Documento1 páginaECU HSFI 2.3 para Corsa e Montana 1.4 e 1.8 de 2007 a 2009carsoAinda não há avaliações
- Reparos e Reconfiguração de Módulos Injeção Eletrônica, Ecu, Imobilizadores (21) 989163008Documento7 páginasReparos e Reconfiguração de Módulos Injeção Eletrônica, Ecu, Imobilizadores (21) 989163008Renato MendesAinda não há avaliações
- Manual Painel GOL GT G1Documento11 páginasManual Painel GOL GT G1Fábio Fiorio100% (1)
- PDF Apostila Franceses CompressDocumento128 páginasPDF Apostila Franceses CompressInjetronic Scope CarAinda não há avaliações
- Simulador de Central Eletronica EcuDocumento4 páginasSimulador de Central Eletronica EcuAlexandre CostaAinda não há avaliações
- Direção elétricaDocumento17 páginasDireção elétricaDaniel Henrique PiovesaniAinda não há avaliações
- Treinamento Injeção AsproDocumento40 páginasTreinamento Injeção Asprolucineiamelo100% (1)
- Sensores Automotivos 1Documento24 páginasSensores Automotivos 1THE MOTORSAinda não há avaliações
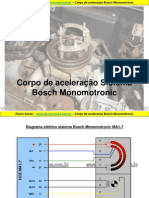
- Corpo aceleração Bosch MonomotronicDocumento22 páginasCorpo aceleração Bosch MonomotronicflaviocursosAinda não há avaliações
- Manual VW 4LV 4SVDocumento11 páginasManual VW 4LV 4SVMarquinhos Sousa100% (1)
- Dica 08Documento6 páginasDica 08jose sousa oliveira100% (1)
- Apostila Eletroeletronico 16-08-13 V14Documento70 páginasApostila Eletroeletronico 16-08-13 V14Leo1080100% (1)
- OBD0274 - Adaptação BC Imob5 Com ECU GM Delco E83Documento23 páginasOBD0274 - Adaptação BC Imob5 Com ECU GM Delco E83cledivanAinda não há avaliações
- Osciloscópio Digital para Testes AutomotivosDocumento46 páginasOsciloscópio Digital para Testes AutomotivosArizio Amorim Rocha JuniorAinda não há avaliações
- Dia 1 - Diagnóstico Alternador Pilotado - Start Stop - BateriasDocumento13 páginasDia 1 - Diagnóstico Alternador Pilotado - Start Stop - BateriasDiogo Beltrame100% (4)
- EstoqueSaldo 20230106085934Documento7 páginasEstoqueSaldo 20230106085934gkafcontabilidadeAinda não há avaliações
- 1 - Princípios de Big Data-Combined - CompressedDocumento193 páginas1 - Princípios de Big Data-Combined - CompressedEli De Faria JuniorAinda não há avaliações
- Trei 2022Documento18 páginasTrei 2022Isaac VihindaAinda não há avaliações
- Liberação autoral da obra 'Sex With Me (Senta AquiDocumento2 páginasLiberação autoral da obra 'Sex With Me (Senta AquiAlessandro ZoeAinda não há avaliações
- CimbramentoDocumento15 páginasCimbramentoJosé Teodoro Souza Jr100% (1)
- Termo Aditivo Ao Contrato de Trabalho Atualizacao A LGPDDocumento2 páginasTermo Aditivo Ao Contrato de Trabalho Atualizacao A LGPDCarla Xavier0% (1)
- CV - VanusaDocumento3 páginasCV - VanusaYasava Samuel EduardoAinda não há avaliações
- Prova Preambular de Agente de Telecomunicações 2011Documento22 páginasProva Preambular de Agente de Telecomunicações 2011Rosângela Ferreira100% (1)
- Quiz GerenciamentoDocumento9 páginasQuiz GerenciamentorafaelajrdsAinda não há avaliações
- ENIAC, o primeiro computador eletrônico digitalDocumento4 páginasENIAC, o primeiro computador eletrônico digitalEltonAinda não há avaliações
- Guia para engajar candidatos no processo seletivoDocumento27 páginasGuia para engajar candidatos no processo seletivoChayeni PiresAinda não há avaliações
- Manual Do Utilizador Da Câmara: PortuguêsDocumento226 páginasManual Do Utilizador Da Câmara: PortuguêseugeniaalemanAinda não há avaliações
- Curso 222309 Aula 04 Fe58 CompletoDocumento41 páginasCurso 222309 Aula 04 Fe58 CompletoCamila da SilveiraAinda não há avaliações
- Jeb Blount PT Fanatical-Prospecting Book LifeFeelingDocumento341 páginasJeb Blount PT Fanatical-Prospecting Book LifeFeelingLucas MoreiraAinda não há avaliações
- Angie Hockman - Shipped (Rev)Documento235 páginasAngie Hockman - Shipped (Rev)Amanda Cortez33% (3)
- Licenciado para entender EPROMsDocumento13 páginasLicenciado para entender EPROMsRodrigo OliveiraAinda não há avaliações
- Gestao Da Seguranca Contra Incendio e Panico 04080903Documento85 páginasGestao Da Seguranca Contra Incendio e Panico 04080903Kosta EngCivil EngSeg100% (1)
- Rel 15151152Documento190 páginasRel 15151152geovane cardosoAinda não há avaliações
- PM3-008 02 20Documento13 páginasPM3-008 02 20Emanuela Amaral100% (1)
- Tema 5 - Project Model Visual (PM Visual)Documento16 páginasTema 5 - Project Model Visual (PM Visual)Jesse FilipeAinda não há avaliações
- 3.-Calculo de Losa BidireccionalDocumento5 páginas3.-Calculo de Losa BidireccionalHerlin Luis Challco HuallpaAinda não há avaliações
- Informe - Cadastro - Unico - N - 008 (1) - DocumentaçãoDocumento4 páginasInforme - Cadastro - Unico - N - 008 (1) - DocumentaçãoSecretaria Executiva 2023Ainda não há avaliações
- Gestão de pedidos de deliveryDocumento28 páginasGestão de pedidos de deliveryfernandocmbenedetteAinda não há avaliações
- Aula 3.1 - Bombas - AtualDocumento45 páginasAula 3.1 - Bombas - AtualJoão PauloAinda não há avaliações
- Internet Nokia g140wh ManualDocumento4 páginasInternet Nokia g140wh ManualEduardo OliveiraAinda não há avaliações
- EBook - Tecnologias de Ensino A Distancia - BônusDocumento76 páginasEBook - Tecnologias de Ensino A Distancia - BônusVRTeixeiraAinda não há avaliações
- Ys150sed Usb (1ste) BrasilDocumento59 páginasYs150sed Usb (1ste) BrasilNelson RodrigoAinda não há avaliações
- Programação de banco de dadosDocumento53 páginasProgramação de banco de dadosAndre SantosAinda não há avaliações
- Infográfico sobre cultura indígena para crianças de 7 anosDocumento4 páginasInfográfico sobre cultura indígena para crianças de 7 anosSilvia OliverMarAinda não há avaliações
- Guia Do Recruta MikeDocumento14 páginasGuia Do Recruta MikeFernando AlbuquerqueAinda não há avaliações