Você também pode gostar
- Dimensionamento de Eixos-2018-COMPLETO CORRIGIDODocumento62 páginasDimensionamento de Eixos-2018-COMPLETO CORRIGIDODouglas Andrini Edmundo100% (2)
- Tabela Periódica Completa e Atualizada 2022 - Toda MatériaDocumento6 páginasTabela Periódica Completa e Atualizada 2022 - Toda MatériaJefferson Vieira de BritoAinda não há avaliações
- Fispq Agipro Deep Wash Hipoclorito de SodioDocumento8 páginasFispq Agipro Deep Wash Hipoclorito de SodioDaniel WeistAinda não há avaliações
- Estudo Básico de Uma Suspensão Do Tipo DUPLO A Com Ênfase para Um Veículo Mini BajaDocumento31 páginasEstudo Básico de Uma Suspensão Do Tipo DUPLO A Com Ênfase para Um Veículo Mini BajaJoao Guilherme Bezerra AlvesAinda não há avaliações
- Estudo Sobre Suspensão Automotiva Focado em Veículos Off-RoadDocumento6 páginasEstudo Sobre Suspensão Automotiva Focado em Veículos Off-RoadsunaramelloAinda não há avaliações
- Relatório Tufão 2012Documento9 páginasRelatório Tufão 2012Matheus NunesAinda não há avaliações
- Freios 1 PDFDocumento63 páginasFreios 1 PDFPaulo GomesAinda não há avaliações
- PAPER 8 - Estudo de Uma Transmissão CVT Destinada A BajaDocumento33 páginasPAPER 8 - Estudo de Uma Transmissão CVT Destinada A BajaLucasAinda não há avaliações
- Dimensionamento de Barra Estabilizadora de Protótipo BAJA-SAEDocumento12 páginasDimensionamento de Barra Estabilizadora de Protótipo BAJA-SAEHenrique Lehr SistoAinda não há avaliações
- Diferença Entre Spoiler e AerofólioDocumento8 páginasDiferença Entre Spoiler e AerofólioDiogo Derli JagnowAinda não há avaliações
- 10 05.1 Artigo CassiaDocumento4 páginas10 05.1 Artigo CassiaMiba InteligenteAinda não há avaliações
- Exercício ECDRDocumento12 páginasExercício ECDRflaviocolmanAinda não há avaliações
- Mecânica de Autoveículos I - P1 - 2013 - Antônio Carlos CanaleDocumento3 páginasMecânica de Autoveículos I - P1 - 2013 - Antônio Carlos CanalekhuekhueAinda não há avaliações
- Controle de Vibracoes - Lista de ExerciciosDocumento3 páginasControle de Vibracoes - Lista de ExerciciosMichel Varjão100% (1)
- Processo de Fabricação de Rodas - APS 5SDocumento23 páginasProcesso de Fabricação de Rodas - APS 5SfariosiAinda não há avaliações
- Lista 1 Segundo Semestre 2014Documento10 páginasLista 1 Segundo Semestre 2014Grazielle Samara PereiraAinda não há avaliações
- Eng Automotiva Aula 6Documento48 páginasEng Automotiva Aula 6Matheus BolandiniAinda não há avaliações
- Enunciado Desafio - Módulo 2 - Bootcamp Desenvolvedor (A) PythonDocumento4 páginasEnunciado Desafio - Módulo 2 - Bootcamp Desenvolvedor (A) PythonDaniela GomesAinda não há avaliações
- Projeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosDocumento10 páginasProjeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosEliabel Alves Barreto JuniorAinda não há avaliações
- ApostilaSCILAB 201402Documento92 páginasApostilaSCILAB 201402Flaviany Maciel100% (1)
- Projeto de Rosca para ExtrusãoDocumento8 páginasProjeto de Rosca para ExtrusãoKleber LauerAinda não há avaliações
- Slides Instrumentacao VazaoDocumento30 páginasSlides Instrumentacao VazaoGetúlio RibeiroAinda não há avaliações
- 2016 - Capítulo 04 - Carroceria - Estrutura - 1 - 33 PDFDocumento36 páginas2016 - Capítulo 04 - Carroceria - Estrutura - 1 - 33 PDFSérgio A CruzAinda não há avaliações
- Guia para Grandes Montagens Solid WorksDocumento21 páginasGuia para Grandes Montagens Solid WorksrobertolobatoAinda não há avaliações
- Lista 5 TransmissibilidadeDocumento4 páginasLista 5 TransmissibilidadeBruna Romanini BassoAinda não há avaliações
- Scilab Apostila UnaDocumento73 páginasScilab Apostila UnaRafaella B. C. Rafa0% (1)
- Apostila Performance Veicular Rev3Documento45 páginasApostila Performance Veicular Rev3Alexandre ChagasAinda não há avaliações
- Introdução Às Vibrações Mecânicas Com MatLab e SimulinkDocumento31 páginasIntrodução Às Vibrações Mecânicas Com MatLab e SimulinkRafael BorelliAinda não há avaliações
- 1a Lista ExerciciosDocumento3 páginas1a Lista ExerciciosBernardo LemosAinda não há avaliações
- Roteiro 3 Experimento Medidores de VazoDocumento8 páginasRoteiro 3 Experimento Medidores de VazoFábio BernalAinda não há avaliações
- Relatório Vibrações Pratica 2Documento19 páginasRelatório Vibrações Pratica 2Matheus MarkiesAinda não há avaliações
- Apostila CNumerico 2013Documento269 páginasApostila CNumerico 2013Jaqueline Neves Do NascimentoAinda não há avaliações
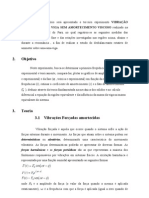
- VIBRAÇÕESDocumento9 páginasVIBRAÇÕEStoshugoAinda não há avaliações
- Artigo - Adequação Na Ergonomia de Um Veiculo Off-RoadDocumento4 páginasArtigo - Adequação Na Ergonomia de Um Veiculo Off-RoadGustavo EhlertAinda não há avaliações
- Aula2 FragmentacaoDocumento43 páginasAula2 FragmentacaoDébora Muniz de SouzaAinda não há avaliações
- Módulo 1 - Erros e Aritmética de Pontos FlutuantesDocumento6 páginasMódulo 1 - Erros e Aritmética de Pontos FlutuantesRafael GonçalvesAinda não há avaliações
- Aula 2 - Aritmética Computacional (Bases)Documento9 páginasAula 2 - Aritmética Computacional (Bases)Washington AlencarAinda não há avaliações
- Aula 03 - Hiperestáticas (Método Das Forças)Documento64 páginasAula 03 - Hiperestáticas (Método Das Forças)Divanil MacedoAinda não há avaliações
- Apostila Básica para Curso de FresamentoDocumento19 páginasApostila Básica para Curso de FresamentoMarcos RobertoAinda não há avaliações
- Lista 1Documento6 páginasLista 1NUÑEZ VILLA JULIO CESARAinda não há avaliações
- Formulário Vibrações Novo PDFDocumento4 páginasFormulário Vibrações Novo PDFmarcioAinda não há avaliações
- Manual Tecnico Elleva Max 500 PortDocumento36 páginasManual Tecnico Elleva Max 500 PortCarlos AugustoAinda não há avaliações
- VibraçãoDocumento1 páginaVibraçãoLuciano Ferreira Dos SantosAinda não há avaliações
- VIBRAÇÕES MECÂNICAS - Parte 3Documento16 páginasVIBRAÇÕES MECÂNICAS - Parte 3Fernanda SilveiraAinda não há avaliações
- Peneira Rotativa PDFDocumento2 páginasPeneira Rotativa PDFFrancoAinda não há avaliações
- Instrumentos de PressãoDocumento56 páginasInstrumentos de PressãoLaboratorio Rocha BrancaAinda não há avaliações
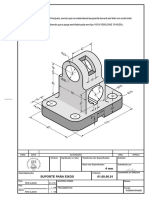
- 01.00.00.01 - Suporte para EixosDocumento3 páginas01.00.00.01 - Suporte para EixosGuilherme PeicheAinda não há avaliações
- Aero Formula SaeDocumento148 páginasAero Formula SaeHenrique Carvalho Figueiredo da SilvaAinda não há avaliações
- Análise Numérica - Aula 2 - Introdução À Aritmética ComputacionalDocumento10 páginasAnálise Numérica - Aula 2 - Introdução À Aritmética ComputacionalJorge EustaquioAinda não há avaliações
- 3 Fundamentos de Mecânica Dos Fluidos e AerodinâmicaDocumento18 páginas3 Fundamentos de Mecânica Dos Fluidos e AerodinâmicaEduardo CaldeiraAinda não há avaliações
- #01 - Sistemas Com 1 GDLDocumento12 páginas#01 - Sistemas Com 1 GDLwillian lopes peçanhaAinda não há avaliações
- Implementação Dos Métodos Numéricos para Resolução de EquaçõesDocumento7 páginasImplementação Dos Métodos Numéricos para Resolução de EquaçõesKenny RalphAinda não há avaliações
- Lista-Ms211 Calculo Numerico Lista p1 PDFDocumento20 páginasLista-Ms211 Calculo Numerico Lista p1 PDFLucas TuãoAinda não há avaliações
- Trabalho T1 Sobre Erros e Zeros de FunçõesDocumento3 páginasTrabalho T1 Sobre Erros e Zeros de FunçõesGuilherme PeicheAinda não há avaliações
- 8 - Sistemas de 2gl Eq Do MovimentoDocumento77 páginas8 - Sistemas de 2gl Eq Do MovimentoMatheus SalesAinda não há avaliações
- Questões para ProvasDocumento15 páginasQuestões para ProvasPedro CeriolliAinda não há avaliações
- Estrutura Geral Dos VeículosDocumento21 páginasEstrutura Geral Dos VeículosDouglas PóvoasAinda não há avaliações
- CHENG, Introdução À Otimização Estrutural - Teoria, Métodos e Soluções (Apostila Otimização1)Documento34 páginasCHENG, Introdução À Otimização Estrutural - Teoria, Métodos e Soluções (Apostila Otimização1)Michel AlbaAinda não há avaliações
- Apostila MecanismosDocumento124 páginasApostila MecanismosAlmir SktAinda não há avaliações
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- 0067 Mulher MaravilhaDocumento23 páginas0067 Mulher Maravilharubialuciadasilvasousa sousa100% (1)
- Convenção de Estocolomo e RoterdãDocumento9 páginasConvenção de Estocolomo e RoterdãBrayan LellisAinda não há avaliações
- RadioatividadeDocumento44 páginasRadioatividadeLuria Bakhtin VygotskyAinda não há avaliações
- Curriculum Wagner (Reparado)Documento2 páginasCurriculum Wagner (Reparado)WAGNER FERNANDESAinda não há avaliações
- Relatório 4 - Família Do CarbonoDocumento12 páginasRelatório 4 - Família Do CarbonoAdriana MelloAinda não há avaliações
- Exercícios Tabela PeriódicaDocumento3 páginasExercícios Tabela Periódicashow17644Ainda não há avaliações
- 1 Ano - A Formação de Átomos Mais PesadosDocumento28 páginas1 Ano - A Formação de Átomos Mais PesadosGarciaJefersonAinda não há avaliações
- Ácido Clorídrico Produção IndustrialDocumento16 páginasÁcido Clorídrico Produção Industrialcar99los0% (1)
- Ae 3ceb Faq7 FT 12a Const MatDocumento3 páginasAe 3ceb Faq7 FT 12a Const MatJoana TeixeiraAinda não há avaliações
- (ABNT-NBR 13598) - Vasos de Pressão para Refrigeração PDFDocumento11 páginas(ABNT-NBR 13598) - Vasos de Pressão para Refrigeração PDFValdenir Dos SantosAinda não há avaliações
- Diagrama de Fases PDFDocumento103 páginasDiagrama de Fases PDFIca AQAinda não há avaliações
- Apostila de FarmacoDocumento158 páginasApostila de FarmacoEduardo Lasmar100% (2)
- Bula Amoxicilina 875MG PDFDocumento2 páginasBula Amoxicilina 875MG PDFEduardoAinda não há avaliações
- 01 Ficha de Trabalho Al q10Documento10 páginas01 Ficha de Trabalho Al q10andrade3100% (1)
- Tecnicas de Analise SemimicroDocumento3 páginasTecnicas de Analise SemimicroMithy GilAinda não há avaliações
- Fispq BR PT Lubrax TRM 4 80WDocumento12 páginasFispq BR PT Lubrax TRM 4 80WGustavo PiramAinda não há avaliações
- Lista de Exercícios de Estereoquímica FQOBDocumento2 páginasLista de Exercícios de Estereoquímica FQOBDANIEL PEREIRA DA SILVA NETOAinda não há avaliações
- Ficha Transportes FotossinteseDocumento6 páginasFicha Transportes Fotossintesegranja2023Ainda não há avaliações
- Produção Da CalDocumento3 páginasProdução Da CalGabriel Alves SilvaAinda não há avaliações
- Mecânica Dos Fluidos - Aula 1 - Apresentação - R1Documento15 páginasMecânica Dos Fluidos - Aula 1 - Apresentação - R1Micelli CamargoAinda não há avaliações
- LISTA II - Termodinâmica - Primeira LeiDocumento2 páginasLISTA II - Termodinâmica - Primeira LeiJennifer MoraisAinda não há avaliações
- Miranda CaetanoRodrigues DDocumento267 páginasMiranda CaetanoRodrigues DGhost SaphireAinda não há avaliações
- Relatorio Antiacido Cristiana e ClaudiaDocumento14 páginasRelatorio Antiacido Cristiana e ClaudiaMaria TeixeiraAinda não há avaliações
- Ciencias Ambietal PDFDocumento158 páginasCiencias Ambietal PDFZenildo BritoAinda não há avaliações
- Fispq - Cloro DPD 1Documento6 páginasFispq - Cloro DPD 1GleidianeAinda não há avaliações
- Arruela Lisa - DIN 125-2-2Documento1 páginaArruela Lisa - DIN 125-2-2Shuichi MurakamiAinda não há avaliações
- Ficha de Trabalho - Quantidade Química e Massa MolarDocumento8 páginasFicha de Trabalho - Quantidade Química e Massa Molarrsantos173Ainda não há avaliações