Você também pode gostar
- 02.DLB TSCLP - Atividades Com ControladoresDocumento227 páginas02.DLB TSCLP - Atividades Com ControladoresFlávio TorresAinda não há avaliações
- Apostila TwidoDocumento35 páginasApostila TwidoRicardo Pinheiro100% (2)
- Manual GSTDocumento17 páginasManual GSTIvanir Ferreira da SilvaAinda não há avaliações
- Introdução Aos Circuitos e Sistemas Eletrónicos (Icse) PDFDocumento96 páginasIntrodução Aos Circuitos e Sistemas Eletrónicos (Icse) PDFMaciel Gomes100% (1)
- Lista de Exercícios 007 PDFDocumento8 páginasLista de Exercícios 007 PDFGabriel Passos0% (1)
- Teoria 19 EncodersDocumento13 páginasTeoria 19 EncodersAmanda DiasAinda não há avaliações
- Aula Pratica 4 softPLC cfw11Documento10 páginasAula Pratica 4 softPLC cfw11Leandro MartirAinda não há avaliações
- Plano de Aula - Simple PresentDocumento7 páginasPlano de Aula - Simple PresentpatriciamedeirosAinda não há avaliações
- Atividades Sobre Os Termos Essenciais Da OraçãoDocumento2 páginasAtividades Sobre Os Termos Essenciais Da OraçãoRosângela Lopes Da Silva90% (10)
- Algoritmos Com JavaScriptDocumento55 páginasAlgoritmos Com JavaScriptPedro Negrao100% (9)
- Exercicios de Aplicacoes para o GRAFCETDocumento7 páginasExercicios de Aplicacoes para o GRAFCETcheguevaraeng100% (1)
- Desenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoNo EverandDesenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoAinda não há avaliações
- EXERCÍCIOS cfw08Documento3 páginasEXERCÍCIOS cfw08mota_j100% (1)
- Conjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaDocumento47 páginasConjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaCaio de MoraesAinda não há avaliações
- CE Aula 02 TransformadoresDocumento47 páginasCE Aula 02 TransformadoresJbprofessor BatistaAinda não há avaliações
- Amplificadores Operacionais e Filtros AtivosDocumento18 páginasAmplificadores Operacionais e Filtros AtivosMarcelo OliveiraAinda não há avaliações
- Aula 2 9 Ensaio de Transformador TrifsicoDocumento6 páginasAula 2 9 Ensaio de Transformador TrifsicoAnamaria Ucucho100% (1)
- Aulas Programação PLC OMROM + GrafcetDocumento67 páginasAulas Programação PLC OMROM + GrafcetcarlosfilipeabAinda não há avaliações
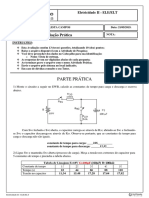
- Avaliação Prática - Eletricidade IIDocumento6 páginasAvaliação Prática - Eletricidade IINilton CamposAinda não há avaliações
- 01 Introducao Robos IndustriaisDocumento15 páginas01 Introducao Robos IndustriaisRafael MarksonAinda não há avaliações
- Curso Pic - Básico - SlidesDocumento150 páginasCurso Pic - Básico - SlidesFabio SouzaAinda não há avaliações
- Entradas Analogicas Pic16f628aDocumento6 páginasEntradas Analogicas Pic16f628apaivafrotaAinda não há avaliações
- Exercícios de ParametrizaçãoDocumento1 páginaExercícios de ParametrizaçãoRonne Herbert100% (2)
- Lista de Exercicios Circuitos LógicosDocumento3 páginasLista de Exercicios Circuitos LógicosAndre BomjardimAinda não há avaliações
- Aula Controle PIDDocumento27 páginasAula Controle PIDPedro NavarroAinda não há avaliações
- 4-Zelio Software Semana 1Documento49 páginas4-Zelio Software Semana 1Daniel Trovao Simoes100% (1)
- Corrente Alternada - Circuitos Monofásicos e Circuitos Trifásicos (Powerpoint)Documento18 páginasCorrente Alternada - Circuitos Monofásicos e Circuitos Trifásicos (Powerpoint)Miguel Azevedo100% (2)
- Eletronica de PotenciaDocumento10 páginasEletronica de PotenciaAriane RochaAinda não há avaliações
- Sistema Trifasico EquilibradoDocumento20 páginasSistema Trifasico EquilibradomewiceAinda não há avaliações
- Aula 3 02-04-2018 Sist. Polif. EquilibradosDocumento130 páginasAula 3 02-04-2018 Sist. Polif. EquilibradosJoão LucasAinda não há avaliações
- Lab 6 MIT Partida Direta e Chave Estrela Triangulo (Roteiro)Documento8 páginasLab 6 MIT Partida Direta e Chave Estrela Triangulo (Roteiro)Alecio Ribeiro Sccp100% (1)
- Aula IFF - Linguagem Ladder - Blocos MatemáticosDocumento10 páginasAula IFF - Linguagem Ladder - Blocos MatemáticosVictor BarretoAinda não há avaliações
- Corrente AlternadaDocumento7 páginasCorrente Alternadawww.cadilhac.com.br100% (2)
- Transformador TP e TCDocumento23 páginasTransformador TP e TCDenys FormigaAinda não há avaliações
- $RPLYSLDDocumento5 páginas$RPLYSLDFelipe Caldas Ferreira dos SantosAinda não há avaliações
- Sistema TrifasicoDocumento46 páginasSistema TrifasicoCicero MelloAinda não há avaliações
- Apostila CLPDocumento47 páginasApostila CLPMaxwiller Rodrigues da SilvaAinda não há avaliações
- Atividade 2 Máquinas CCDocumento2 páginasAtividade 2 Máquinas CCNicolas Menezes CoelhoAinda não há avaliações
- Trabalho de Comandos Elétricos SensoresDocumento15 páginasTrabalho de Comandos Elétricos SensoresBruna GuimarãesAinda não há avaliações
- Resolução Prova 2 Eletrônica AnalógicaDocumento3 páginasResolução Prova 2 Eletrônica AnalógicaIsabella BAinda não há avaliações
- Sistemas de ComunicaçãoDocumento49 páginasSistemas de ComunicaçãoDaniel Sá Araújo100% (1)
- Atividade Diagnóstica Proteção de Sistemas ElétricosDocumento49 páginasAtividade Diagnóstica Proteção de Sistemas ElétricosJonathan100% (1)
- Exercícios de Aplicações para o GRAFCETDocumento7 páginasExercícios de Aplicações para o GRAFCETHeitor RuschmannAinda não há avaliações
- Circuitos Trifásicos EquilibradosDocumento10 páginasCircuitos Trifásicos EquilibradosdigcarmonaAinda não há avaliações
- Lista de Exercícios Relação de Transformação - Soluções-Abe895448fd94 6uiEIouDocumento53 páginasLista de Exercícios Relação de Transformação - Soluções-Abe895448fd94 6uiEIou4lan808Ainda não há avaliações
- Componentes Electrónicos - ResistênciasDocumento20 páginasComponentes Electrónicos - ResistênciasAntónio Henriques100% (1)
- Prova IEDocumento5 páginasProva IEDiego Junior TamiozzoAinda não há avaliações
- PLC TrabalhoDocumento16 páginasPLC TrabalhoEdnercio Luis100% (1)
- Questionario Partida Estrela - TriânguloDocumento7 páginasQuestionario Partida Estrela - TriânguloSaulo CâmaraAinda não há avaliações
- Exercício - 11 - Instalações Elétricas I - 02 2016 PitágorasDocumento4 páginasExercício - 11 - Instalações Elétricas I - 02 2016 PitágorasViniciusCamargosAinda não há avaliações
- Máquinas Elétricas RotativasDocumento67 páginasMáquinas Elétricas RotativasAilton Façanha MoreiraAinda não há avaliações
- Lista de Exercícios INDUTORES PDFDocumento2 páginasLista de Exercícios INDUTORES PDFJessica JacobAinda não há avaliações
- Linguagem LadderDocumento16 páginasLinguagem LadderAlison Gibim100% (1)
- Questionario EletrotécnicaDocumento3 páginasQuestionario EletrotécnicacarlosmarciosfreitasAinda não há avaliações
- Ficha 2 - Transdutores Eléctricos de Temperatura e FotoelétricosDocumento16 páginasFicha 2 - Transdutores Eléctricos de Temperatura e FotoelétricosSergioo100% (1)
- Álgebra de Boole (L)Documento61 páginasÁlgebra de Boole (L)Felipe MotaAinda não há avaliações
- Projetos De Instrumentação Eletrônica Usando O ArduinoNo EverandProjetos De Instrumentação Eletrônica Usando O ArduinoAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Figurações Do Diabo em DanteDocumento85 páginasFigurações Do Diabo em DanteJúlio César BarbosaAinda não há avaliações
- Manual de Apoio - 10ºano - Aprend - Essencial-LogicaDocumento19 páginasManual de Apoio - 10ºano - Aprend - Essencial-LogicaIsa Neves100% (1)
- Atributos Dos Cosmos14Documento4 páginasAtributos Dos Cosmos14Vinicius CardealAinda não há avaliações
- Mod Portugues Reforma Ortográfica Apostila Agnaldo Martino 250212 Fernanda MatprofDocumento8 páginasMod Portugues Reforma Ortográfica Apostila Agnaldo Martino 250212 Fernanda MatprofMauro Cezar100% (1)
- Radio OperadorDocumento4 páginasRadio OperadorElisiane PythonissamAinda não há avaliações
- CRISTOLOGIADocumento12 páginasCRISTOLOGIAhthiago1234Ainda não há avaliações
- Prova CalculoDocumento1 páginaProva Calculovanessa PJMPAinda não há avaliações
- Ava 1 Pontuaçao 04Documento3 páginasAva 1 Pontuaçao 04guedeacarolineAinda não há avaliações
- FT CatolicaDocumento20 páginasFT Catolicacolarinho cuchupicaAinda não há avaliações
- Manual Do Usuário Central Alarme Paradox EVO BRDocumento36 páginasManual Do Usuário Central Alarme Paradox EVO BRmarkusrcAinda não há avaliações
- Santo Agostinho - Sermão 532 (52) (A Paixão Do Salvador e Os Dois Ladrões)Documento7 páginasSanto Agostinho - Sermão 532 (52) (A Paixão Do Salvador e Os Dois Ladrões)eduardoexp9515Ainda não há avaliações
- boletim 19.05.24Documento2 páginasboletim 19.05.24Rosane BarbettaAinda não há avaliações
- Exercícios de GramáticaDocumento102 páginasExercícios de GramáticaEduardo BarretoAinda não há avaliações
- Abrir Apostila - Aquisià à o e Desenvolvimento de Linguagem - UnifatecieDocumento81 páginasAbrir Apostila - Aquisià à o e Desenvolvimento de Linguagem - UnifatecieThalita MaffeiAinda não há avaliações
- Manual Do RadiojornalismoDocumento15 páginasManual Do RadiojornalismoDemétrius Jubé100% (1)
- Joyanes C+ Apênd IDocumento8 páginasJoyanes C+ Apênd IGelvazio CamargoAinda não há avaliações
- MPE - Crítica Textual PDFDocumento8 páginasMPE - Crítica Textual PDFWesley Porfírio NobreAinda não há avaliações
- Ficha de Gramática Sobre o VocativoDocumento1 páginaFicha de Gramática Sobre o VocativosipmaAinda não há avaliações
- Demetrius Nichele Macei: O Princípio Da Verdade Material No Processo TributárioDocumento188 páginasDemetrius Nichele Macei: O Princípio Da Verdade Material No Processo TributárioChico de MoraesAinda não há avaliações
- O Camelo e o Buraco Da AgulhaDocumento2 páginasO Camelo e o Buraco Da AgulhaRaphael PucciniAinda não há avaliações
- Funções 4 Função AfimDocumento2 páginasFunções 4 Função AfimMariana SilvaAinda não há avaliações
- 16 - Vamos Ler Poemas e Contos AfricanosDocumento10 páginas16 - Vamos Ler Poemas e Contos AfricanosanaAinda não há avaliações
- Primeiros Passos Na Fé Cristã PDFDocumento66 páginasPrimeiros Passos Na Fé Cristã PDFArlan SousaAinda não há avaliações
- Infografico Jornalismo PDFDocumento11 páginasInfografico Jornalismo PDFjoseanapAinda não há avaliações
- Exercícios de Revisão GramaticalDocumento5 páginasExercícios de Revisão GramaticalAnabela FernandesAinda não há avaliações
- Cic DeusDocumento4 páginasCic DeusFerkeliana DiasAinda não há avaliações
- Trabalho Gramat Verbos 7 Ano 2010Documento4 páginasTrabalho Gramat Verbos 7 Ano 2010Marcia BarrosAinda não há avaliações