Você também pode gostar
- Avaliação Profop Etep História Da Arte Da Pré-História À Arte ContemporâneaDocumento2 páginasAvaliação Profop Etep História Da Arte Da Pré-História À Arte ContemporâneaValeria Braga0% (1)
- TCC Completo PDFDocumento92 páginasTCC Completo PDFZeAinda não há avaliações
- 02.DLB TSCLP - Atividades Com ControladoresDocumento227 páginas02.DLB TSCLP - Atividades Com ControladoresFlávio TorresAinda não há avaliações
- Manual Depil MotionDocumento44 páginasManual Depil MotionMarta Serafim100% (1)
- CLP AltusDocumento22 páginasCLP AltusfloquinhoekiquinhoAinda não há avaliações
- Sistemas Microcontrolados - ELT 1Documento3 páginasSistemas Microcontrolados - ELT 1Gielly Campos100% (1)
- Planificação - Práticas Oficinais - 11ºanoDocumento5 páginasPlanificação - Práticas Oficinais - 11ºanoJoão Paulo LeãoAinda não há avaliações
- Lista 02 - Motores CCDocumento2 páginasLista 02 - Motores CCReginey Barbosa0% (1)
- Exercícios Matemática Básica IDocumento4 páginasExercícios Matemática Básica Imarcoswnery@hotmail.comAinda não há avaliações
- Apêndice - Curso Completo Robôs Industriais para IniciantesDocumento45 páginasApêndice - Curso Completo Robôs Industriais para IniciantesHelio rodrigues da silva cabeça100% (1)
- Desenvolvendo Um Frequencímetro Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Frequencímetro Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Atividade Prática - PPII - ELE - 1 25Documento6 páginasAtividade Prática - PPII - ELE - 1 25Elaine SouzaAinda não há avaliações
- Aula 3 - Eletrotécnica AplicadaDocumento38 páginasAula 3 - Eletrotécnica AplicadaHenrique AlmeidaAinda não há avaliações
- Avaliação Prática - Eletricidade IIDocumento6 páginasAvaliação Prática - Eletricidade IINilton CamposAinda não há avaliações
- Automação Industrial3 - CLPDocumento31 páginasAutomação Industrial3 - CLPCleitoviskiAinda não há avaliações
- Lista de Exercicios N11Documento11 páginasLista de Exercicios N11Isaac EliasAinda não há avaliações
- Atividade de Pesquisa Fundamentos Da Eletricidade IidocxDocumento3 páginasAtividade de Pesquisa Fundamentos Da Eletricidade IidocxDinho SilvaAinda não há avaliações
- Atividade de Pesquisa 01Documento6 páginasAtividade de Pesquisa 01Juliano MartinsAinda não há avaliações
- Lab - 03 - Protoboard e Associacao de Resistores PDFDocumento3 páginasLab - 03 - Protoboard e Associacao de Resistores PDFryukenjrAinda não há avaliações
- Atividade Diagnóstica Proteção de Sistemas ElétricosDocumento49 páginasAtividade Diagnóstica Proteção de Sistemas ElétricosJonathan100% (1)
- Exercícios Dispositivos Eletrônicos Analógicos Lista 1Documento7 páginasExercícios Dispositivos Eletrônicos Analógicos Lista 1Marco AntonioAinda não há avaliações
- EAD Plano de Ensino Instrumentacao Eletronica 2020Documento4 páginasEAD Plano de Ensino Instrumentacao Eletronica 2020Eduardo ZimmerAinda não há avaliações
- Resolução Das Questões de AutomaçãoDocumento3 páginasResolução Das Questões de Automaçãojos luiz100% (1)
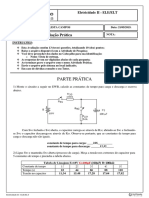
- Avaliação Prática - Eletrônica Digital-1 29Documento2 páginasAvaliação Prática - Eletrônica Digital-1 29Gielly CamposAinda não há avaliações
- 17 - Controlador Lógico ProgramávelDocumento69 páginas17 - Controlador Lógico ProgramávelemtelesAinda não há avaliações
- Projeto de Automação - ESTRUTURADocumento15 páginasProjeto de Automação - ESTRUTURAjorgerms1011Ainda não há avaliações
- Aula 11 - Grafcet em LadderDocumento16 páginasAula 11 - Grafcet em LadderShekináh EquipamentosAinda não há avaliações
- Atividade de Pesquisa 02 - Eletrônica DigitalDocumento8 páginasAtividade de Pesquisa 02 - Eletrônica Digitaljafkjakd75% (4)
- Apostila Laboratório de EletrônicaDocumento57 páginasApostila Laboratório de EletrônicaJean Neves dos Santos SerraAinda não há avaliações
- UC5 - Roteiro de Prática PDFDocumento33 páginasUC5 - Roteiro de Prática PDFPatrick FranciscoAinda não há avaliações
- Exercício - 11 - Instalações Elétricas I - 02 2016 PitágorasDocumento4 páginasExercício - 11 - Instalações Elétricas I - 02 2016 PitágorasViniciusCamargosAinda não há avaliações
- Atividade 2 Aula 16-04-21 - CorrigidaDocumento2 páginasAtividade 2 Aula 16-04-21 - CorrigidaANA PAULA FERRETTIAinda não há avaliações
- Solução Dos Exercicios Dos Projetos Dos Supervisorios Da ApostilaDocumento58 páginasSolução Dos Exercicios Dos Projetos Dos Supervisorios Da ApostilaDaniel Fec Flu100% (1)
- Curso Pic - Básico - SlidesDocumento150 páginasCurso Pic - Básico - SlidesFabio SouzaAinda não há avaliações
- 6 - Laboratório de Sistemas Digitais - 2 SérieDocumento64 páginas6 - Laboratório de Sistemas Digitais - 2 SérieCristiano BragaAinda não há avaliações
- ChaveadoresDocumento17 páginasChaveadoresJulhao HackerAinda não há avaliações
- Avaliação OsciloscopioDocumento3 páginasAvaliação OsciloscopioEzequiel da Silva Ferreira100% (1)
- REDE ModbusDocumento33 páginasREDE ModbusCauê Duarte MachadoAinda não há avaliações
- Resolução Lista de Exercicios de SupervisorioDocumento26 páginasResolução Lista de Exercicios de SupervisorioGustavo Araujo100% (1)
- Lista de Exercícios 1 - Circuitos Resistivos CCDocumento4 páginasLista de Exercícios 1 - Circuitos Resistivos CCJhonatha BernardoAinda não há avaliações
- Eletronica de PotenciaDocumento116 páginasEletronica de PotenciaFelipe de Oliveira100% (1)
- Prova IEDocumento5 páginasProva IEDiego Junior TamiozzoAinda não há avaliações
- Atividade de Pesquisa 01 - Fundamentos Da Eletricidade IIDocumento2 páginasAtividade de Pesquisa 01 - Fundamentos Da Eletricidade IIjorgeAinda não há avaliações
- Apostila Redes Industriais - SupervisórioDocumento147 páginasApostila Redes Industriais - SupervisórioJose Antonio de PaivaAinda não há avaliações
- Acionamentos Elétricos - Plano de AulaDocumento81 páginasAcionamentos Elétricos - Plano de AulaMaxDalmiAinda não há avaliações
- Introdução A Controladores Lógicos ProgramáveisDocumento40 páginasIntrodução A Controladores Lógicos ProgramáveisRafael Pereira Goncalves100% (1)
- Enrolamento ArmaduraDocumento12 páginasEnrolamento ArmaduraMarlon Rezende100% (2)
- Rede Ethernet IndustrialDocumento36 páginasRede Ethernet Industriallorentz franklinAinda não há avaliações
- Atividade Prática - Eletrônica 07-03-20Documento9 páginasAtividade Prática - Eletrônica 07-03-20Julio amorimAinda não há avaliações
- Atividade de Pesquisa (Documento3 páginasAtividade de Pesquisa (fabio fa100% (1)
- Aula Automação IndustrialDocumento20 páginasAula Automação IndustrialBibiana PortoAinda não há avaliações
- Informática Industrial 1: Prof. Me. José Alberto Gobbes Cararo Jose - Cararo@Documento55 páginasInformática Industrial 1: Prof. Me. José Alberto Gobbes Cararo Jose - Cararo@vitor ramosAinda não há avaliações
- Dispositivos de ProtecaoDocumento43 páginasDispositivos de ProtecaoIahaia Amade Mucussete AmisseAinda não há avaliações
- Apostila CLPDocumento47 páginasApostila CLPMaxwiller Rodrigues da SilvaAinda não há avaliações
- Acionamentos EletrônicosDocumento3 páginasAcionamentos EletrônicosDOUGLASAinda não há avaliações
- Atividade de Pesquisa - Sistema Elétrico de PotênciaDocumento1 páginaAtividade de Pesquisa - Sistema Elétrico de PotênciaWallef QueirozAinda não há avaliações
- Exercícios Sobre Tensão, Corrente e ResistênciaDocumento2 páginasExercícios Sobre Tensão, Corrente e ResistênciaLUIZ ALEXANDRE DIAS DE ALMEIDAAinda não há avaliações
- Atividade de Pesquisa - Acionamentos ElétricosDocumento2 páginasAtividade de Pesquisa - Acionamentos ElétricosEverton CostaAinda não há avaliações
- Questoes Sistemas SupervisoriosDocumento6 páginasQuestoes Sistemas Supervisoriosbob_flavioAinda não há avaliações
- EASA - Eletroeletrônica Aplicada A Sistemas Automatizados - 1Documento87 páginasEASA - Eletroeletrônica Aplicada A Sistemas Automatizados - 1Gabriel LucasAinda não há avaliações
- 17 Anexo3Documento13 páginas17 Anexo3Rafael MarksonAinda não há avaliações
- PersonalidadeDocumento23 páginasPersonalidadeRafael MarksonAinda não há avaliações
- Cuidados Pré e Pó DepilaçãoDocumento2 páginasCuidados Pré e Pó DepilaçãoRafael Markson100% (1)
- 2016 04 19 Manual Curso de Motores 2016 2 PDFDocumento232 páginas2016 04 19 Manual Curso de Motores 2016 2 PDFRafael MarksonAinda não há avaliações
- 1958 - SuéciaDocumento17 páginas1958 - SuéciaLauro RincoAinda não há avaliações
- M KM1B Rev 0Documento6 páginasM KM1B Rev 0Raphael AvelinoAinda não há avaliações
- Aparelho VocálicoDocumento6 páginasAparelho VocálicoÂndria MargaridaAinda não há avaliações
- AULA 01 Ondas EletromagnéticasDocumento13 páginasAULA 01 Ondas Eletromagnéticaswynne luizaAinda não há avaliações
- Cartilha Servidoras03Documento221 páginasCartilha Servidoras03Lucas BinsfeldAinda não há avaliações
- 7487 Infrações TributáriasDocumento14 páginas7487 Infrações TributáriasNathy BentoAinda não há avaliações
- Benedita FernandesDocumento3 páginasBenedita FernandesChico EscribaAinda não há avaliações
- 6217 Gastos Rendimentos e Resultados-1aulaDocumento16 páginas6217 Gastos Rendimentos e Resultados-1aulaRosario CardimAinda não há avaliações
- Estudo Da Reta Geometria Analitica PDFDocumento3 páginasEstudo Da Reta Geometria Analitica PDFchalingoAinda não há avaliações
- Atividade Recuperacao 6.ano C 1o TriDocumento4 páginasAtividade Recuperacao 6.ano C 1o Trimicaela senaAinda não há avaliações
- SinopseDocumento11 páginasSinopseDomingas LuisAinda não há avaliações
- Poas HeterogeneosDocumento31 páginasPoas HeterogeneosAna Maria FerrariAinda não há avaliações
- O Fenômeno Psicossomático Além Das EstruturasDocumento6 páginasO Fenômeno Psicossomático Além Das EstruturasburfzAinda não há avaliações
- Ativ - Sílabas Complexas - P1Documento97 páginasAtiv - Sílabas Complexas - P1valdilenemenezesvianna100% (1)
- Aula 1 - Administração Publica e Noçoes IntrodutoriasDocumento26 páginasAula 1 - Administração Publica e Noçoes IntrodutoriasDarlan AlvesAinda não há avaliações
- h1 A Linfa1Documento7 páginash1 A Linfa1Diana NeivaAinda não há avaliações
- Reicardo Freire Memoria e Imitação Na Percepcao MusicalDocumento9 páginasReicardo Freire Memoria e Imitação Na Percepcao MusicalCarolAinda não há avaliações
- Gramatica Essencial de Interlingua em Portugues PDFDocumento75 páginasGramatica Essencial de Interlingua em Portugues PDFKarencitaGonzalesAinda não há avaliações
- Atividade 2 - Ead - Gestão em SaúdeDocumento21 páginasAtividade 2 - Ead - Gestão em SaúdeBruna Oliveira100% (1)
- Por Que o Futebol Brasileiro É HorrívelDocumento2 páginasPor Que o Futebol Brasileiro É HorrívelJoao FelipeAinda não há avaliações
- Orações CoordenadasDocumento4 páginasOrações CoordenadasNathalia MartinsAinda não há avaliações
- Relatório 01 - Preparação de Lâminas A Fresco de Células Da Mucosa Bucal e Células BactérianasDocumento5 páginasRelatório 01 - Preparação de Lâminas A Fresco de Células Da Mucosa Bucal e Células BactérianasErlon Moitinho100% (1)
- Educação Visual 9 ClasseDocumento110 páginasEducação Visual 9 ClasseMutondo Maneja90% (10)
- Legislação ComercialDocumento3 páginasLegislação ComercialLucia Margarida Ponte AlcaidinhoAinda não há avaliações
- ATIVIDADE FINAL - GeotecniaDocumento3 páginasATIVIDADE FINAL - GeotecniaTHIAGO SQUIZZATTO OLIVEIRAAinda não há avaliações
- Comunicado - Área Da SaúdeDocumento2 páginasComunicado - Área Da SaúdeDayanna PaulaAinda não há avaliações
- Catalogo - Pecas - DAFRA CITYCOM S 300iDocumento43 páginasCatalogo - Pecas - DAFRA CITYCOM S 300iMichel Santos100% (1)