Você também pode gostar
- Apostila 018 09 Enrolamento de Motores EletricosDocumento12 páginasApostila 018 09 Enrolamento de Motores EletricosLuis Coelho FerreiraAinda não há avaliações
- Estimação de indicadores de qualidade da energia elétricaNo EverandEstimação de indicadores de qualidade da energia elétricaAinda não há avaliações
- Compilado Técnico Acionamentos ogAZEZKDocumento27 páginasCompilado Técnico Acionamentos ogAZEZKDAYANNE SOUZA RODRIGUES GAMA100% (1)
- Catalogo Disjuntores 3VTDocumento6 páginasCatalogo Disjuntores 3VTAna Maria GodoyAinda não há avaliações
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Manual Motores WegDocumento88 páginasManual Motores WegSonia GarciaAinda não há avaliações
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoAinda não há avaliações
- Anexo 2 (PDF) - Livro MetrologiaDocumento51 páginasAnexo 2 (PDF) - Livro MetrologiaVini MolinariAinda não há avaliações
- Aula 04 - Acionamentos EletroeletrônicosDocumento18 páginasAula 04 - Acionamentos EletroeletrônicosWAGNER RODRIGUES DE ABREUAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Sistemas e Materiais Elétricos de Aeronaves PDFDocumento139 páginasSistemas e Materiais Elétricos de Aeronaves PDFCesar Dos SantosAinda não há avaliações
- Leit. Intrep. Desesho Mecânico - Prof. Jorge Reis - EletromecânicaDocumento114 páginasLeit. Intrep. Desesho Mecânico - Prof. Jorge Reis - EletromecânicaCarlos SampaioAinda não há avaliações
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- 06 - Medição de Resistências de Isolamento - SlidesDocumento34 páginas06 - Medição de Resistências de Isolamento - SlidesHemersonFA100% (1)
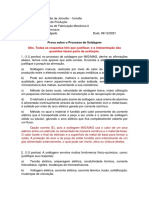
- Prova de SoldagemDocumento4 páginasProva de SoldagemVitor DelgadoAinda não há avaliações
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNo EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoAinda não há avaliações
- Manutenção Bombas Hidraulica Bom MaterialDocumento25 páginasManutenção Bombas Hidraulica Bom MaterialAlessandro Macena da Silva100% (1)
- 1º Avaliação PneumáticaDocumento2 páginas1º Avaliação PneumáticaElton RicardoAinda não há avaliações
- Aula 02 - Acionamentos EletroeletrônicosDocumento15 páginasAula 02 - Acionamentos EletroeletrônicosWAGNER RODRIGUES DE ABREUAinda não há avaliações
- PPC Automacao e Controle 106Documento21 páginasPPC Automacao e Controle 106Fabiano Sannino100% (1)
- Eletrotecnica GeralDocumento212 páginasEletrotecnica Geraldesportista_luisAinda não há avaliações
- Tabela Do EletricistaDocumento2 páginasTabela Do EletricistarenatoAinda não há avaliações
- Dimensionamento - de - Motobomba PoçoDocumento8 páginasDimensionamento - de - Motobomba PoçoMizael Rodrigo100% (1)
- 8.FornosEletricos - Joao Mamede Filho - EditadopdfDocumento82 páginas8.FornosEletricos - Joao Mamede Filho - EditadopdfTulioAinda não há avaliações
- EQUIPAMENTOS Elétricos Industriais - 2015Documento164 páginasEQUIPAMENTOS Elétricos Industriais - 2015Marcos Feijó FilhoAinda não há avaliações
- Weg Cfw500 Manual Do UsuárioDocumento88 páginasWeg Cfw500 Manual Do UsuárioLuanAinda não há avaliações
- Beghim Catálogo 2014Documento1 páginaBeghim Catálogo 2014Luiz AlmeidaAinda não há avaliações
- Desenho Mecânico e MetrologiaDocumento264 páginasDesenho Mecânico e MetrologiaÉder Luís Silveira da SilvaAinda não há avaliações
- Apostila - Balanceamento de Máquinas RotativasDocumento63 páginasApostila - Balanceamento de Máquinas RotativasLucio Martins100% (1)
- Motores ElétricosDocumento9 páginasMotores ElétricosValdir PradoAinda não há avaliações
- 492 Prominp Continuacao Nr10 Aplicacao Pratica e Riscos EletricosDocumento128 páginas492 Prominp Continuacao Nr10 Aplicacao Pratica e Riscos EletricosLeandro S SilvaAinda não há avaliações
- CURSO DE SUPERVISOR DE MANUTENÇÃO Rev1Documento66 páginasCURSO DE SUPERVISOR DE MANUTENÇÃO Rev1Dom DiegoAinda não há avaliações
- TCs PDFDocumento24 páginasTCs PDFMatheusBueno100% (1)
- Serviço Nacional de Aprendizagem IndustrialDocumento26 páginasServiço Nacional de Aprendizagem IndustrialJames Martins ParreiraAinda não há avaliações
- 02 - Sistemas Eletricos I - Sistema PUDocumento71 páginas02 - Sistemas Eletricos I - Sistema PUJosé Ferreira100% (1)
- Shunts Português1Documento1 páginaShunts Português1Antonio Carlos Santos100% (1)
- Eletricidade Basica 2016Documento102 páginasEletricidade Basica 2016Joao MaduroAinda não há avaliações
- Comandos Eletropneumaticos Com CLPDocumento8 páginasComandos Eletropneumaticos Com CLPWellington Ghezzi0% (1)
- Hidroeletricas 2018-2022 Jan2018Documento1 páginaHidroeletricas 2018-2022 Jan2018boyna_ramoneAinda não há avaliações
- Dimensionamento de Baterias VRLADocumento6 páginasDimensionamento de Baterias VRLAGustavoAinda não há avaliações
- Tabelas - Manual ElétricoDocumento20 páginasTabelas - Manual ElétricoCíntia MoreiraAinda não há avaliações
- Sysfile108produto28 24012017155143Documento33 páginasSysfile108produto28 24012017155143Adelmo FilhoAinda não há avaliações
- Curva de Proteção Sepam - 42Documento5 páginasCurva de Proteção Sepam - 42estevaomoraes100% (1)
- Apostila Ed1 MatheusDocumento72 páginasApostila Ed1 MatheusJosé AntônioAinda não há avaliações
- Conexoes RoscasDocumento28 páginasConexoes RoscasCarlos Vandré100% (1)
- Cabos 2Documento31 páginasCabos 2Jefferson Santana100% (2)
- Tecnosolda 03Documento15 páginasTecnosolda 03jrinspetorAinda não há avaliações
- Maquinas EletricasDocumento47 páginasMaquinas EletricassaladasfalhasAinda não há avaliações
- (Cliqueapostilas - Com.br) Eletrica Sistemas de Baixa TensaoDocumento198 páginas(Cliqueapostilas - Com.br) Eletrica Sistemas de Baixa TensaoSAULDAVI ISSCARAinda não há avaliações
- ProteçãoDocumento41 páginasProteçãosilvaca2Ainda não há avaliações
- Monografia Entregue Sobre Grupo GeradorDocumento35 páginasMonografia Entregue Sobre Grupo GeradoraesbAinda não há avaliações
- Motor UniversalDocumento7 páginasMotor UniversalAndre Maciel RibeiroAinda não há avaliações
- Motor Monofásico de Fase AuxiliarDocumento5 páginasMotor Monofásico de Fase AuxiliarFrancisco BaptistaAinda não há avaliações
- Acionamentos Eletricos QuestõesDocumento11 páginasAcionamentos Eletricos QuestõesAndré Filipe Couto de Oliveira CoimbraAinda não há avaliações
- EletricaDocumento6 páginasEletricaStefani Elen Seynabou Abrenhosa SoaresAinda não há avaliações
- Manual Equitação Eb Eb60mt26401Documento214 páginasManual Equitação Eb Eb60mt26401pedrofahd100% (1)
- Declaracao de Guarda de Fato de CriancaDocumento1 páginaDeclaracao de Guarda de Fato de CriancaGlauber LeiteAinda não há avaliações
- Lista de Comandos AutoCADDocumento9 páginasLista de Comandos AutoCADmalcarvalhoAinda não há avaliações
- Apostila - Conceitos Basicos Qualidade de Produto2006Documento46 páginasApostila - Conceitos Basicos Qualidade de Produto2006fabiocodesoAinda não há avaliações
- Matlab 2012 1Documento90 páginasMatlab 2012 1Glauber LeiteAinda não há avaliações
- Afiliado Do Zero.Documento14 páginasAfiliado Do Zero.lopszinmaker ϟAinda não há avaliações
- Questoes de Matematica Financeira - Cesgranrio - 2011 - 2013Documento34 páginasQuestoes de Matematica Financeira - Cesgranrio - 2011 - 2013tibaAinda não há avaliações
- Leis de MendelDocumento18 páginasLeis de MendelRomulo Rodrigues da silvaAinda não há avaliações
- O Avivamento No Novo TestamentoDocumento3 páginasO Avivamento No Novo TestamentoPedro HenriqueAinda não há avaliações
- Tiradentes-Maçom Iniciado (Revista Ciência e Maçonaria) PDFDocumento7 páginasTiradentes-Maçom Iniciado (Revista Ciência e Maçonaria) PDFMarcos Vaz100% (1)
- Estadodo Rio de Janf - Jro - Pre - Fe.Itura Municipal De. Barra Do Nrai - Gabinete Do PrefeitoDocumento1 páginaEstadodo Rio de Janf - Jro - Pre - Fe.Itura Municipal De. Barra Do Nrai - Gabinete Do PrefeitoRaoni CarmoAinda não há avaliações
- Petição Inicial (Monitória)Documento4 páginasPetição Inicial (Monitória)luizaAinda não há avaliações
- Suco Verde - Uma RevoluçãoDocumento6 páginasSuco Verde - Uma RevoluçãopmaraAinda não há avaliações
- Cap16!17!18 LandimLRDocumento242 páginasCap16!17!18 LandimLRJoão CarlosAinda não há avaliações
- DBD Revisao AlgebraDocumento2 páginasDBD Revisao AlgebraValquíriaAinda não há avaliações
- (ID 6812 PPT) - Recuperação em Ciências Humanas e Sociais Aplicadas Projetos Interdisciplinares 1 - 12 - 01 - DA - VFDocumento64 páginas(ID 6812 PPT) - Recuperação em Ciências Humanas e Sociais Aplicadas Projetos Interdisciplinares 1 - 12 - 01 - DA - VFthaissperandioAinda não há avaliações
- Narrativa História em QuadrinhosDocumento7 páginasNarrativa História em QuadrinhosAlexandre GuersoniAinda não há avaliações
- Matriz de História - Módulo 3 Janeiro 2010Documento3 páginasMatriz de História - Módulo 3 Janeiro 2010jaimemonizAinda não há avaliações
- Protheus Crystal Integration Sem BdeDocumento1 páginaProtheus Crystal Integration Sem BdeRicardo CamiloAinda não há avaliações
- Nota Fiscal - Notebook - CarrefourDocumento1 páginaNota Fiscal - Notebook - CarrefourCristiano CoutinhoAinda não há avaliações
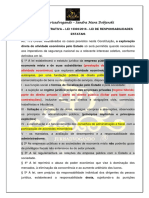
- Direito Administrativo - Lei 13303-2016Documento20 páginasDireito Administrativo - Lei 13303-2016Sd jurisadv - Sandra DobjenskiAinda não há avaliações
- NeupsilinDocumento2 páginasNeupsilinedu7650% (2)
- CR5-SMS-RG-125 - Checklist Liberação de Equipamentos (Documentação PTRANS) BDocumento2 páginasCR5-SMS-RG-125 - Checklist Liberação de Equipamentos (Documentação PTRANS) BBruno Jesus0% (1)
- Cromoterapia Aplicada1Documento113 páginasCromoterapia Aplicada1João Caputo100% (3)
- Caderno 1 - Álgebra (Conjuntos)Documento35 páginasCaderno 1 - Álgebra (Conjuntos)Fernando AntonioAinda não há avaliações
- Atividade 3 - Nossos Sonhos - 11 de Abril de 2022Documento2 páginasAtividade 3 - Nossos Sonhos - 11 de Abril de 2022Áureo Melo100% (1)
- Aposila Religiões Comparadas Bacharel 2013 Ibe PDFDocumento48 páginasAposila Religiões Comparadas Bacharel 2013 Ibe PDFAnderson SilvérioAinda não há avaliações
- Ciganos No BrasilDocumento43 páginasCiganos No BrasilodemarioAinda não há avaliações
- Questões para Treinamento (A) - N. 1Documento12 páginasQuestões para Treinamento (A) - N. 1Julia Renatta RenattaAinda não há avaliações
- Valvula Borboleta WaferDocumento7 páginasValvula Borboleta WaferGlaucio PietrobomAinda não há avaliações
- Capítulo I Francisco de Oliveira "Crítica A Razão Dualista"Documento10 páginasCapítulo I Francisco de Oliveira "Crítica A Razão Dualista"Gladyson Brito PereiraAinda não há avaliações
- Batalha Do Passo Do RosárioDocumento3 páginasBatalha Do Passo Do RosárioMarco Aurelio CaroneAinda não há avaliações
- U1 - Lista de Materiais - PTDocumento9 páginasU1 - Lista de Materiais - PTKelly FerreiraAinda não há avaliações
- Relatório de Solução-Tampão Citrato e Ác. CítricoDocumento17 páginasRelatório de Solução-Tampão Citrato e Ác. CítricoFelipe Pimentel Paixão100% (1)
- Criminologias Feministas - Tres Possibilidades para A Configuração de Um Campo de EstudoDocumento15 páginasCriminologias Feministas - Tres Possibilidades para A Configuração de Um Campo de EstudoMargaret NielsenAinda não há avaliações