Você também pode gostar
- Xamanismo A Verdadeira CuraDocumento59 páginasXamanismo A Verdadeira CuraCarolina Cleida100% (9)
- Simetria Molecular III: Série Didática para o apoio a formação de professores de QuímicaNo EverandSimetria Molecular III: Série Didática para o apoio a formação de professores de QuímicaAinda não há avaliações
- Aconselhamento PsicologicoDocumento40 páginasAconselhamento Psicologicomaida lucas100% (3)
- Leis de NewtonDocumento4 páginasLeis de NewtonLeo_C76Ainda não há avaliações
- Curso Subido Modulo 07 Aula 2Documento17 páginasCurso Subido Modulo 07 Aula 2Roberta LimaAinda não há avaliações
- Perguntas para Avaliação Do TocDocumento3 páginasPerguntas para Avaliação Do TocElizangela LinsAinda não há avaliações
- Indisciplina Na Escola Julio Groppa AquinoDocumento8 páginasIndisciplina Na Escola Julio Groppa AquinoClaudia Gomes75% (8)
- Fracções 1Documento4 páginasFracções 1Alda Sofia SantosAinda não há avaliações
- Aula-2 Mecanica VibratoriaDocumento29 páginasAula-2 Mecanica VibratoriaedsonguitarAinda não há avaliações
- Notas de Aula - Mecanica Dos FluidosDocumento103 páginasNotas de Aula - Mecanica Dos FluidosAntonio AndradeAinda não há avaliações
- Teste de 8º Ano - Texto PoéticoDocumento12 páginasTeste de 8º Ano - Texto Poéticobruno venturaAinda não há avaliações
- Dinâmica de Uma PartículaDocumento13 páginasDinâmica de Uma PartículaAlberto Jaime JaimeAinda não há avaliações
- Física - Aula 3Documento12 páginasFísica - Aula 3Yan ReisAinda não há avaliações
- TEXTO DE REVISÃO 16 - Força de Atrito e Força Centrípeta..: R R R R R + Sen RDocumento3 páginasTEXTO DE REVISÃO 16 - Força de Atrito e Força Centrípeta..: R R R R R + Sen RLeandro CunhaAinda não há avaliações
- FISICA-Forças Conservativas e Nao ConservativasDocumento32 páginasFISICA-Forças Conservativas e Nao ConservativasAmeriico Figueiredo100% (2)
- HIBBELER R C Cinetica de Uma Particula Forca e AceleracaoDocumento58 páginasHIBBELER R C Cinetica de Uma Particula Forca e AceleracaoMayra FelipaAinda não há avaliações
- Estática - Estatica-ApostilaDocumento16 páginasEstática - Estatica-ApostilaRiel KlinAinda não há avaliações
- FÍSICADocumento36 páginasFÍSICAHésio VazAinda não há avaliações
- Elli Eel1an MCB3Documento17 páginasElli Eel1an MCB3Otávio Cecon ComelliAinda não há avaliações
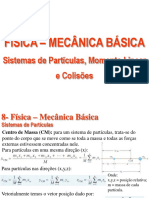
- Física-Mecânica Básica - CAP - 8 Sistema de Partículas, Momento Linear e Colisões - UnilasalleDocumento8 páginasFísica-Mecânica Básica - CAP - 8 Sistema de Partículas, Momento Linear e Colisões - UnilasalleDalmedson Freitas FilhoAinda não há avaliações
- Silo - Tips Dinamica Do Ponto MaterialDocumento16 páginasSilo - Tips Dinamica Do Ponto MaterialJose Guilherme AntónioAinda não há avaliações
- Dinâmica Do Ponto MaterialDocumento13 páginasDinâmica Do Ponto MaterialRenato NegrãoAinda não há avaliações
- Fisica MTDocumento39 páginasFisica MTLuiz HenriqueAinda não há avaliações
- HIBBELER, R.C. Cinética de Uma Partícula Força e AceleraçãoDocumento58 páginasHIBBELER, R.C. Cinética de Uma Partícula Força e AceleraçãoAlexandre Guimarães50% (6)
- DINÂMICADocumento7 páginasDINÂMICAMusic RelaxAinda não há avaliações
- Os Princípios Da Dinâmica - 11111Documento14 páginasOs Princípios Da Dinâmica - 11111Kelton NguluveAinda não há avaliações
- Dinamica I - Cinetica Das ParticulasDocumento33 páginasDinamica I - Cinetica Das Particulasthiagom990% (1)
- Trabalho Energia PDFDocumento12 páginasTrabalho Energia PDFDavid OliveiraAinda não há avaliações
- AAula 1,2,3,4,5,6 Estática2023 - 045725Documento33 páginasAAula 1,2,3,4,5,6 Estática2023 - 045725Mario ManuelAinda não há avaliações
- Atividade de Física 1 - Dinâmica Dos CorposDocumento6 páginasAtividade de Física 1 - Dinâmica Dos CorposGrace Kelly UfmgAinda não há avaliações
- QUESTAO Leis de Newton p1Documento5 páginasQUESTAO Leis de Newton p1Iranuza AlmeidaAinda não há avaliações
- Movimento OscilatórioDocumento36 páginasMovimento Oscilatórioalmeida.agostinho8406Ainda não há avaliações
- Leis de Newton-Nota de EstudoDocumento5 páginasLeis de Newton-Nota de EstudoMarlon ChristmanAinda não há avaliações
- Quantidade de Movimento - Exercícios RespondidosDocumento5 páginasQuantidade de Movimento - Exercícios RespondidosHelisio100% (1)
- Conclusao RelatórioDocumento8 páginasConclusao RelatórioeldmarasAinda não há avaliações
- Física II - MHSDocumento13 páginasFísica II - MHSkarillasantosAinda não há avaliações
- Física (Mecânica) Forças e Dinâmica Do Movimento CircularDocumento6 páginasFísica (Mecânica) Forças e Dinâmica Do Movimento CircularLucas MendonçaAinda não há avaliações
- Aula 5Documento19 páginasAula 5Azt RibAinda não há avaliações
- Aula 5 Mec 2Documento12 páginasAula 5 Mec 2HigorAinda não há avaliações
- Aula 4Documento2 páginasAula 4Wilson R SilvaAinda não há avaliações
- Introdução À EstáticaDocumento6 páginasIntrodução À EstáticaThiago TamachiroAinda não há avaliações
- Introducao A MecanicaDocumento14 páginasIntroducao A MecanicanuncafalhaAinda não há avaliações
- TrajetóriaDocumento8 páginasTrajetóriaLeandro MagalhãesAinda não há avaliações
- Relatorio Mesa de ForçasDocumento8 páginasRelatorio Mesa de ForçasPatricia SchumacherAinda não há avaliações
- Equilibrio Dos Sistemas de ForcasDocumento43 páginasEquilibrio Dos Sistemas de ForcasRomulo PiresAinda não há avaliações
- Física - Impulso e Quantidade de MovimentoDocumento9 páginasFísica - Impulso e Quantidade de MovimentoFísica Concurso Vestibular100% (1)
- Apostila MecânicaDocumento97 páginasApostila MecânicaaroldoAinda não há avaliações
- Cap5 - MC Quarrie (Tradução)Documento24 páginasCap5 - MC Quarrie (Tradução)karinaAinda não há avaliações
- EnergiaDocumento6 páginasEnergiaLuiza Gasparetto BaldoniAinda não há avaliações
- Recordacao MecNewtonDocumento7 páginasRecordacao MecNewtonSamuel BeresAinda não há avaliações
- AAula 1,2,3 e 4 Estática 2017Documento29 páginasAAula 1,2,3 e 4 Estática 2017Daniel ArmandoAinda não há avaliações
- Apresentação Da 3a. Aula - Unidade 1 - Grandezas Fundamentais - RevisãoDocumento50 páginasApresentação Da 3a. Aula - Unidade 1 - Grandezas Fundamentais - RevisãoIuri LorenzoAinda não há avaliações
- Relatividade RestritaDocumento135 páginasRelatividade RestritaupadorAinda não há avaliações
- Desvendando A Física Do Corpo HumanoDocumento169 páginasDesvendando A Física Do Corpo HumanoMarcus Vinícius Patente Alves100% (2)
- Leis de Newton 06-03-23Documento13 páginasLeis de Newton 06-03-23JoaoAinda não há avaliações
- Aula 1 Mec Geral 19 2Documento35 páginasAula 1 Mec Geral 19 2Thiago lopes100% (1)
- Força, Impulso e Quantidade de MovimentoDocumento2 páginasForça, Impulso e Quantidade de MovimentoEuclidesAinda não há avaliações
- Equações Lineares de Segunda OrdemDocumento6 páginasEquações Lineares de Segunda OrdemMateus SantanaAinda não há avaliações
- Relatório de TorqueDocumento15 páginasRelatório de TorqueNaidson BittencourtAinda não há avaliações
- 17 - Introdução À Dinâmica (Revisada)Documento33 páginas17 - Introdução À Dinâmica (Revisada)profnonocmm100% (1)
- Dinâmica de Partícula - Impulso e Quantidade de MovimentoDocumento22 páginasDinâmica de Partícula - Impulso e Quantidade de MovimentoVinicius PereiraAinda não há avaliações
- Mecânica Básica SlideDocumento291 páginasMecânica Básica SlideGabriel DaniloAinda não há avaliações
- Momento AngularDocumento3 páginasMomento AngularLucas CarvalhoAinda não há avaliações
- Aula26 - Mec Geral 2Documento9 páginasAula26 - Mec Geral 2rareisAinda não há avaliações
- Ficha 3 PDFDocumento4 páginasFicha 3 PDFKeven Gonçalves100% (2)
- Ficha 2 PDFDocumento4 páginasFicha 2 PDFKeven GonçalvesAinda não há avaliações
- Ficha 1 PDFDocumento3 páginasFicha 1 PDFKeven GonçalvesAinda não há avaliações
- Aula 3 Dinamica de Particula Metodo de Trabalho Energia e Implso Quantidade de Movimento PDFDocumento10 páginasAula 3 Dinamica de Particula Metodo de Trabalho Energia e Implso Quantidade de Movimento PDFKeven Gonçalves100% (1)
- CMSP-"Somos Todos Padrãozinho"Documento12 páginasCMSP-"Somos Todos Padrãozinho"Rodrigo De SenaAinda não há avaliações
- Existencialismo de SartreDocumento2 páginasExistencialismo de SartrePaulo TylerAinda não há avaliações
- Assistencia Farmaceutica Pediatria Brasil RecomendacoesDocumento89 páginasAssistencia Farmaceutica Pediatria Brasil RecomendacoesMarcela Amaral PontesAinda não há avaliações
- 77 Decisões Importantes para o Seu CasamentoDocumento9 páginas77 Decisões Importantes para o Seu CasamentoSilvana X Aquiles FerreiraAinda não há avaliações
- Aula - 5Documento43 páginasAula - 5texugolokuAinda não há avaliações
- Manometro de Tubo AbertoDocumento4 páginasManometro de Tubo AbertoLeonardo MardeganAinda não há avaliações
- Artigo 15-ptDocumento12 páginasArtigo 15-ptRosilainy SurubiAinda não há avaliações
- Normas Da ABNTDocumento29 páginasNormas Da ABNTCarolineMiguéisAinda não há avaliações
- Introducao A Dramatizacao CristaDocumento10 páginasIntroducao A Dramatizacao Cristati85058621Ainda não há avaliações
- Matemática AplicadaDocumento34 páginasMatemática AplicadaMaria Helena MacedoAinda não há avaliações
- É Veneno Ou Remédio - FiocruzDocumento385 páginasÉ Veneno Ou Remédio - FiocruzMarco Aurélio Lessa Villela100% (1)
- Semeando o Amor em FamíliaDocumento38 páginasSemeando o Amor em FamílialucasgervasioAinda não há avaliações
- A CEO e o Baba Mila WanderDocumento307 páginasA CEO e o Baba Mila WanderGabriela SantosAinda não há avaliações
- Psicoterapia Comportamental PDFDocumento32 páginasPsicoterapia Comportamental PDFArthur AlvesAinda não há avaliações
- Núcleo de Pós-Graduação Pitágoras Escola Satélite Curso de Especialização em Engenharia de Segurança Do TrabalhoDocumento66 páginasNúcleo de Pós-Graduação Pitágoras Escola Satélite Curso de Especialização em Engenharia de Segurança Do TrabalhoWesley CoelhoAinda não há avaliações
- 921 - Soc Etnocentrismo 1emDocumento5 páginas921 - Soc Etnocentrismo 1emmfatimadlopesAinda não há avaliações
- Método Mov - Canvas PossuídoDocumento1 páginaMétodo Mov - Canvas PossuídoKaren Melissa PauliAinda não há avaliações
- MORGANA FIGUEIREDO MEDEIROS - (46726-11301-1-697050) MORGANA FIGUEIREDO MEDEIROS-46726-11300-3-697050TCC POS GRADUACAO - Gestao de PessoasDocumento16 páginasMORGANA FIGUEIREDO MEDEIROS - (46726-11301-1-697050) MORGANA FIGUEIREDO MEDEIROS-46726-11300-3-697050TCC POS GRADUACAO - Gestao de PessoasMiria CastilhoAinda não há avaliações
- Parkison - EscalasDocumento8 páginasParkison - EscalasJannes3Ainda não há avaliações
- Catalago Moto Bomba Branco Bd705 e Bd710Documento4 páginasCatalago Moto Bomba Branco Bd705 e Bd710Fabio MeinerzAinda não há avaliações
- Estoque GeralDocumento37 páginasEstoque GeralDavi CellAinda não há avaliações
- Comparação Entre As Teorias de Kant e de MillDocumento6 páginasComparação Entre As Teorias de Kant e de MillFátima Paiva100% (2)
- Apostila Técnica Boas Práticas de Operação, Manutenção e Segurança de GuindautosDocumento18 páginasApostila Técnica Boas Práticas de Operação, Manutenção e Segurança de GuindautosArtur JardimAinda não há avaliações