Você também pode gostar
- Métodos quantitativos e qualitativos em administraçãoDocumento7 páginasMétodos quantitativos e qualitativos em administraçãoClécio Silva100% (1)
- Lista 3 EaDocumento4 páginasLista 3 EaJúlio CunhaAinda não há avaliações
- Cálculo III atividade avaliativa funções múltiplasDocumento27 páginasCálculo III atividade avaliativa funções múltiplasLarissa FiorotAinda não há avaliações
- Geometria AnaliticaDocumento2 páginasGeometria AnaliticaAmanda MiquiliniAinda não há avaliações
- Secao 8 de Elon Lages II PDFDocumento3 páginasSecao 8 de Elon Lages II PDFJulianAinda não há avaliações
- Funções de Várias VariáveisDocumento7 páginasFunções de Várias VariáveisLeonardo GuimarãesAinda não há avaliações
- Exame de seleção para doutorado em matemática da UFAMDocumento39 páginasExame de seleção para doutorado em matemática da UFAMroseane souzaAinda não há avaliações
- Análise I - Lista 01 de exercícios sobre conjuntos e funçõesDocumento3 páginasAnálise I - Lista 01 de exercícios sobre conjuntos e funçõesDavi ÁlefeAinda não há avaliações
- Lista de Exercícios Análise Real Corpo Ordenado Completo Dos Números Reais 11 01 2021Documento3 páginasLista de Exercícios Análise Real Corpo Ordenado Completo Dos Números Reais 11 01 2021Davy Christian Souza CardosoAinda não há avaliações
- Equações diofantinas quadráticas e ternas pitagóricasDocumento9 páginasEquações diofantinas quadráticas e ternas pitagóricassax91Ainda não há avaliações
- 15440701082013analise Na Reta Aula 6Documento50 páginas15440701082013analise Na Reta Aula 6Agamenon NasAinda não há avaliações
- Operadores auto-adjuntosDocumento24 páginasOperadores auto-adjuntossaraAinda não há avaliações
- 2019 - Lista 03-LOB1012Documento7 páginas2019 - Lista 03-LOB1012ster0% (1)
- Polinômios irredutíveis e divisão euclidianaDocumento9 páginasPolinômios irredutíveis e divisão euclidianaRodrigo GomesAinda não há avaliações
- MA11 - Exercicios U17Documento5 páginasMA11 - Exercicios U17lmaraujo67Ainda não há avaliações
- Introd Algebra Exercicios Resolvidos 5 Lenimar N AndradeDocumento10 páginasIntrod Algebra Exercicios Resolvidos 5 Lenimar N AndradeAlex Pereira BezerraAinda não há avaliações
- Topologia Geral IntroduçãoDocumento81 páginasTopologia Geral Introduçãomitnels100% (1)
- Exercícios Álgebra LinearDocumento17 páginasExercícios Álgebra LinearLuisCarlosMorgadoAinda não há avaliações
- AV2 MA11 2014 Com Gabarito PDFDocumento4 páginasAV2 MA11 2014 Com Gabarito PDFgifttAinda não há avaliações
- Exames Qualificacao ProfmatDocumento203 páginasExames Qualificacao Profmatacleydson2010100% (1)
- Algebra Linear Exercicios OlimpoDocumento16 páginasAlgebra Linear Exercicios Olimpoanon_788064665Ainda não há avaliações
- Teorema de Euler e Teorema de WilsonDocumento20 páginasTeorema de Euler e Teorema de WilsonJoão Rocha100% (2)
- Lista de Exercícios de Análise RealDocumento3 páginasLista de Exercícios de Análise Realgustavo0% (1)
- Geometria Analítica e Curvas PlanaresDocumento6 páginasGeometria Analítica e Curvas PlanaresPaloma Bagarrão NevesAinda não há avaliações
- Exercicios (Provas Antigas) Calc2 2018 2Documento8 páginasExercicios (Provas Antigas) Calc2 2018 2Vanessa Menezes Theodoro0% (1)
- Estruturas Algébricas e Operações BináriasDocumento8 páginasEstruturas Algébricas e Operações BináriasMarcos PauloAinda não há avaliações
- Álgebra II - EP12 - Semana 15Documento10 páginasÁlgebra II - EP12 - Semana 15Diego Silva0% (1)
- Álgebra - Sistemas de Equações LinearesDocumento33 páginasÁlgebra - Sistemas de Equações LinearesEpifânio FerreiraAinda não há avaliações
- Operaoes Leis de Composiao InternaDocumento13 páginasOperaoes Leis de Composiao InternaNonata AraújoAinda não há avaliações
- Prova A Calculo Diferencial ResolvidaDocumento23 páginasProva A Calculo Diferencial ResolvidaLuiz Henrique de PaulaAinda não há avaliações
- Lista de exercícios para a Prova I de regressão linearDocumento4 páginasLista de exercícios para a Prova I de regressão linearJecaByteAinda não há avaliações
- Calculo Vetorial I - Curvas de NívelDocumento23 páginasCalculo Vetorial I - Curvas de NívelAlan RobsonAinda não há avaliações
- MA11 - Exercicios U19Documento3 páginasMA11 - Exercicios U19Guto Gomes GomesAinda não há avaliações
- Primeira Lista - Analise Na RetaDocumento3 páginasPrimeira Lista - Analise Na RetaDuda MendesAinda não há avaliações
- Estimando proporções em uma amostraDocumento27 páginasEstimando proporções em uma amostranoam orcoAinda não há avaliações
- Funções Reais de Uma Variável RealDocumento4 páginasFunções Reais de Uma Variável RealCardoso VicenteAinda não há avaliações
- Calcular integral de linha e campoDocumento5 páginasCalcular integral de linha e campogilberto100% (1)
- Operações matemáticas fundamentaisDocumento17 páginasOperações matemáticas fundamentaisCarolSantosCorreiaAinda não há avaliações
- Lista de Funções Que Não Pode IntegrarDocumento6 páginasLista de Funções Que Não Pode IntegrarDouglas ViniciusAinda não há avaliações
- Lista 1 - Cálculo Avançado - AmandaDocumento6 páginasLista 1 - Cálculo Avançado - AmandaAmanda AraújoAinda não há avaliações
- Prova 1 - Análise no Rn - Compactos, Derivadas e Transformações LinearesDocumento1 páginaProva 1 - Análise no Rn - Compactos, Derivadas e Transformações LinearesÊnio Carlos LeiteAinda não há avaliações
- An AliseDocumento43 páginasAn AlisedywillydiasAinda não há avaliações
- Dicas e Respostas Lista 1 Edo2Documento8 páginasDicas e Respostas Lista 1 Edo2Märkíito TiAu100% (2)
- 38118-Geometria AnaliticaDocumento87 páginas38118-Geometria AnaliticaRodrigo Schneider0% (1)
- Soluções Geometria Riemanniana (Manfredo)Documento27 páginasSoluções Geometria Riemanniana (Manfredo)JulioCesarMohnsamAinda não há avaliações
- Funções VetoriaisDocumento18 páginasFunções Vetoriaisengeproduezo80% (5)
- Plano Tangente e Aproximações LinearesDocumento19 páginasPlano Tangente e Aproximações LinearesMaira RodriguesAinda não há avaliações
- Exercicios Resolvidos de ProbabilidadeDocumento27 páginasExercicios Resolvidos de ProbabilidadeEldo SilvaAinda não há avaliações
- Calculo 3 - Integrais Multiplas, Capos, Integrais de Linhas e Integrais de SuperficieDocumento184 páginasCalculo 3 - Integrais Multiplas, Capos, Integrais de Linhas e Integrais de SuperficieJoão Victor de Assis FerreiraAinda não há avaliações
- Lei Do CancelamentoDocumento1 páginaLei Do CancelamentoAnonymous WjYoSBreoAinda não há avaliações
- Funções Reais Cap4e5Documento40 páginasFunções Reais Cap4e5vitorbelfort1982Ainda não há avaliações
- Cardinais - Transfinitos PDFDocumento13 páginasCardinais - Transfinitos PDFJorge Luiz FerreiraAinda não há avaliações
- Caderno de Exercícios AL - 2016.2Documento77 páginasCaderno de Exercícios AL - 2016.2OtavioCaesarAinda não há avaliações
- Matematica Discreta ExerciciosDocumento48 páginasMatematica Discreta ExerciciosEmanuel Alejandro MacielAinda não há avaliações
- Notas de Aula 01-EARDocumento21 páginasNotas de Aula 01-EARsusanaAinda não há avaliações
- Equações Diferenciais OrdináriasDocumento53 páginasEquações Diferenciais OrdináriasninemcrAinda não há avaliações
- Curvas PlanasDocumento452 páginasCurvas PlanasHamilton C RodriguesAinda não há avaliações
- Frensel K, Delgado J - Notas de Geometria Diferencial Cap1Documento37 páginasFrensel K, Delgado J - Notas de Geometria Diferencial Cap1Edson GagliardiAinda não há avaliações
- Planilha Calculo BDI REVISADADocumento4 páginasPlanilha Calculo BDI REVISADALeandro RibeiroAinda não há avaliações
- Atividade Síntese MatemáticaDocumento3 páginasAtividade Síntese Matemáticaskyasmim08Ainda não há avaliações
- Atividades de Matemática do 1o TrimestreDocumento21 páginasAtividades de Matemática do 1o TrimestresigauqueAinda não há avaliações
- Notação Do Cubo Magico by Renan PDFDocumento7 páginasNotação Do Cubo Magico by Renan PDFrsirallaAinda não há avaliações
- Dieta salvadora de micróbios contra lixo plásticoDocumento16 páginasDieta salvadora de micróbios contra lixo plásticoguto123 AlbuquerqueAinda não há avaliações
- Matemática financeira: Razão, porcentagem, juros e montanteDocumento9 páginasMatemática financeira: Razão, porcentagem, juros e montanteThiago LebraAinda não há avaliações
- Análise de amplificadores de áudio classes A, B, AB, G e HDocumento15 páginasAnálise de amplificadores de áudio classes A, B, AB, G e Hgutofsa1764Ainda não há avaliações
- 2a Lei da TermodinâmicaDocumento2 páginas2a Lei da TermodinâmicaAna Abrahão100% (1)
- Resumo Matemática DiscretaDocumento6 páginasResumo Matemática DiscretaPedro DiasAinda não há avaliações
- FRP Análise Numérica e ExperimentalDocumento9 páginasFRP Análise Numérica e ExperimentalJose Eduardo GranatoAinda não há avaliações
- Revisão de TrigonometriaDocumento39 páginasRevisão de TrigonometriaAlex MarquesAinda não há avaliações
- Matemática e lógica para criançasDocumento34 páginasMatemática e lógica para criançasHilca DornasAinda não há avaliações
- 9 ESTATAulaDocumento16 páginas9 ESTATAulaRennan MartinsAinda não há avaliações
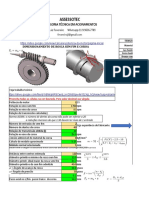
- Dimensionamento de rosca sem fim e coroa para motor de 6 CVDocumento7 páginasDimensionamento de rosca sem fim e coroa para motor de 6 CVWilsonAinda não há avaliações
- Prova de Matemática do 7o Ano com 15 QuestõesDocumento8 páginasProva de Matemática do 7o Ano com 15 QuestõesThiara SantanaAinda não há avaliações
- ML8000DDocumento42 páginasML8000Ddanielwjr0% (2)
- Fundamentos de Cartografia para Profissionais de Geomãtica PDFDocumento59 páginasFundamentos de Cartografia para Profissionais de Geomãtica PDFAreli Nogueira100% (1)
- Swing-trade: passo-a-passo para identificar tendências e operar correçõesDocumento61 páginasSwing-trade: passo-a-passo para identificar tendências e operar correçõesDavid Venancio50% (2)
- Mapa Mental Parâmetros PsicométricosDocumento2 páginasMapa Mental Parâmetros PsicométricosKali100% (1)
- Microestrutura de ligasDocumento39 páginasMicroestrutura de ligasEduardo MuellerAinda não há avaliações
- Display Heidenhain InstrucaoDocumento131 páginasDisplay Heidenhain InstrucaoMauro S CabralAinda não há avaliações
- O valor histórico e pessoal das cartasDocumento23 páginasO valor histórico e pessoal das cartaslincolnanderson tinocovenancioAinda não há avaliações
- Concurso para Auxiliar de Administração na Câmara Municipal de SousaDocumento7 páginasConcurso para Auxiliar de Administração na Câmara Municipal de SousaJhukliaAinda não há avaliações
- Sistema de bombeamento de águaDocumento9 páginasSistema de bombeamento de águaTarcisio Kock FilhoAinda não há avaliações
- Aula1 - Introdução e Ponto FlutuanteDocumento32 páginasAula1 - Introdução e Ponto FlutuanteLuana NobreAinda não há avaliações
- Quimica - Propriedades Dos Líquidos e SólidosDocumento3 páginasQuimica - Propriedades Dos Líquidos e SólidosQuímica Qui0% (2)
- Manual de Estudos de Tráfego DNIT 2006Documento388 páginasManual de Estudos de Tráfego DNIT 2006dougx20Ainda não há avaliações
- Lista de exercícios de matemática do 9o anoDocumento5 páginasLista de exercícios de matemática do 9o anoRaphael VitorAinda não há avaliações
- Prada & Garrido 2013 - APADocumento37 páginasPrada & Garrido 2013 - APAantoniojgteixeiraAinda não há avaliações