Você também pode gostar
- Metodologia para Realizacao Do Ajustamento de RedeDocumento14 páginasMetodologia para Realizacao Do Ajustamento de RedeUsuário AusenteAinda não há avaliações
- CaboDocumento10 páginasCaboAlexia Aydee Penna da CunhaAinda não há avaliações
- Mef 1Documento28 páginasMef 1Maria Cecilia Pontes SilvaAinda não há avaliações
- 50100008Documento6 páginas50100008Kelly TorresAinda não há avaliações
- Efeito Do Tipo de Refino de Malhas Não-Uniformes de VolumesDocumento15 páginasEfeito Do Tipo de Refino de Malhas Não-Uniformes de VolumesSolve ItAinda não há avaliações
- PREVISÃO EVENTOS HIDROLÓGICOS RNADocumento10 páginasPREVISÃO EVENTOS HIDROLÓGICOS RNAFrancisco Jácome SarmentoAinda não há avaliações
- Ana LuciaDocumento84 páginasAna LuciaBLANCA MAYUMI GOMEZ CHALLOAinda não há avaliações
- 537 1887 4 PBDocumento15 páginas537 1887 4 PBRafaelAinda não há avaliações
- Uniasselvi - Calculo NumericoDocumento5 páginasUniasselvi - Calculo NumericoSantana Passos100% (1)
- Artigo 65062bc9 ArquivoDocumento13 páginasArtigo 65062bc9 ArquivoBruce ChombeAinda não há avaliações
- CLAGTEE2009 - Aplicação de Extração de Regras para Análise de Transformadores de PotênciaDocumento7 páginasCLAGTEE2009 - Aplicação de Extração de Regras para Análise de Transformadores de PotênciajcmsergioAinda não há avaliações
- Resolucao e Implementacao de Metodos Numericos para Resolucao de Equacoes Nao LinearesDocumento12 páginasResolucao e Implementacao de Metodos Numericos para Resolucao de Equacoes Nao LinearesAngela Franca AntunesAinda não há avaliações
- 2350-Texto Do Artigo-4677-4710-10-20181203Documento2 páginas2350-Texto Do Artigo-4677-4710-10-20181203DAVID DOUGLAS TOMAZ DE FARIASAinda não há avaliações
- COasdfasdfN08sadf 152asdf8asdfDocumento10 páginasCOasdfasdfN08sadf 152asdf8asdfUnknown WKAinda não há avaliações
- Artigo CLEI2014Documento20 páginasArtigo CLEI2014Eduardo MoreiraAinda não há avaliações
- Analise Da Estabilidade Do Metodo Explicito para DDocumento10 páginasAnalise Da Estabilidade Do Metodo Explicito para DCesar RoqueAinda não há avaliações
- ENMC 2018 Rafael LibotteDocumento9 páginasENMC 2018 Rafael LibotteRafael LibotteAinda não há avaliações
- Matemática 6Documento13 páginasMatemática 6petalanovinhaAinda não há avaliações
- Ensino a Distância de Matemática ADocumento4 páginasEnsino a Distância de Matemática ADomingos PinhoAinda não há avaliações
- Otimização Da Colônia de FormigasDocumento9 páginasOtimização Da Colônia de FormigasbrunoanunciacaoAinda não há avaliações
- Cap 1Documento3 páginasCap 1Rodrigo CaldasAinda não há avaliações
- Material de EstudoDocumento11 páginasMaterial de EstudoVictória CostaAinda não há avaliações
- As Curvas de LissajousDocumento9 páginasAs Curvas de LissajousDoraci GabrielAinda não há avaliações
- Programação Matemática: Otimização Linear e Não LinearNo EverandProgramação Matemática: Otimização Linear e Não LinearAinda não há avaliações
- Modelo de Halpin-TsaiDocumento10 páginasModelo de Halpin-TsaiTamara TavaresAinda não há avaliações
- Modelos Não Lineares Recorrentes Com Capacidade de ExtrapolaçãoDocumento55 páginasModelos Não Lineares Recorrentes Com Capacidade de ExtrapolaçãoRegis QueirozAinda não há avaliações
- Questões Resolvidas EnadeDocumento79 páginasQuestões Resolvidas EnadeJanaina Leitinho100% (1)
- Algoritmo Branch and Bound Nao LinearDocumento6 páginasAlgoritmo Branch and Bound Nao LinearhuamanahuiAinda não há avaliações
- Análise Comparativa Entre o Método de Newton-Raphson e Newton-Raphson Modificado Aplicados A Modelos Estruturais Bidimensionais e TridimensionaisDocumento11 páginasAnálise Comparativa Entre o Método de Newton-Raphson e Newton-Raphson Modificado Aplicados A Modelos Estruturais Bidimensionais e TridimensionaisBeatriz MartinhãoAinda não há avaliações
- Metodo Dos Elementos FinitosDocumento9 páginasMetodo Dos Elementos Finitosronald.immeAinda não há avaliações
- Relatório JOEL - BackpropagationDocumento21 páginasRelatório JOEL - BackpropagationDev BranvierAinda não há avaliações
- Otimização de vigas de concreto usando RNA e AGsDocumento16 páginasOtimização de vigas de concreto usando RNA e AGsRenato FilhoAinda não há avaliações
- Análise Funcional MAT513Documento21 páginasAnálise Funcional MAT513Gerardo Mauricio Rojas CruzAinda não há avaliações
- Matriz Da Prova de Exame Matematica ADocumento3 páginasMatriz Da Prova de Exame Matematica Acallhawking2Ainda não há avaliações
- Planejamento de Matemática para 9o anoDocumento7 páginasPlanejamento de Matemática para 9o anoEdymilson SantosAinda não há avaliações
- Programação linear, inteira e branch and boundDocumento18 páginasProgramação linear, inteira e branch and boundGeovane HenriqueAinda não há avaliações
- Comparação entre métodos analítico e numérico para análise de viga engastadaDocumento2 páginasComparação entre métodos analítico e numérico para análise de viga engastadabruno18Ainda não há avaliações
- Métodos Matemáticos em Engenharia II: Notas de AulasDocumento15 páginasMétodos Matemáticos em Engenharia II: Notas de Aulasjjci1Ainda não há avaliações
- Conceitos BasicosDocumento22 páginasConceitos BasicosGFerreiraluisAinda não há avaliações
- Matemática 9o Ano: Funções, Equações e GeometriaDocumento6 páginasMatemática 9o Ano: Funções, Equações e GeometriaLeonardo PortalAinda não há avaliações
- Trigonometria, funções e cálculo diferencial no 11o anoDocumento6 páginasTrigonometria, funções e cálculo diferencial no 11o anoAlexandre CaleiroAinda não há avaliações
- Introdução ao ANSYS para análise estruturalDocumento95 páginasIntrodução ao ANSYS para análise estruturalRaquel Fernandes100% (2)
- Um Estudo Sobre Redes Neurais Convolucionais e Sua Aplicaccao em Deteccao de PedestresDocumento4 páginasUm Estudo Sobre Redes Neurais Convolucionais e Sua Aplicaccao em Deteccao de PedestresDeryk TiAinda não há avaliações
- Guia de Aprendizagem de MatemáticaDocumento2 páginasGuia de Aprendizagem de MatemáticaMohamed MatematicaAinda não há avaliações
- Rede neural Adaline e aprendizado por erro quadrático médioDocumento16 páginasRede neural Adaline e aprendizado por erro quadrático médioFrancisco AraújoAinda não há avaliações
- Introdução Elementos FinitosDocumento77 páginasIntrodução Elementos Finitosmarcus04100% (1)
- Aproximação de funções com GeoGebraDocumento9 páginasAproximação de funções com GeoGebrasssAinda não há avaliações
- Matriz da prova de exame de Matemática ADocumento5 páginasMatriz da prova de exame de Matemática AEsmael TetêAinda não há avaliações
- 2552-Article Text-7217-1-10-20080422Documento9 páginas2552-Article Text-7217-1-10-20080422rodrigo soaresAinda não há avaliações
- Métodos numéricos para solução de equações diferenciais ordináriasDocumento8 páginasMétodos numéricos para solução de equações diferenciais ordináriasAndre VieiraAinda não há avaliações
- MEF Introdução Elementos FinitosDocumento67 páginasMEF Introdução Elementos FinitosThomas Marques de CastroAinda não há avaliações
- GeomDifer CurvasDocumento155 páginasGeomDifer CurvasJOÃO LIMAAinda não há avaliações
- Apontamentos de Geometria Diferencial: Departamento de Matem Atica Universidade de Coimbra 2003Documento13 páginasApontamentos de Geometria Diferencial: Departamento de Matem Atica Universidade de Coimbra 2003Jorge Luís Lisboa CardosoAinda não há avaliações
- SistemasDocumento3 páginasSistemasHugo CostaAinda não há avaliações
- redesneurais_MathematicaDocumento22 páginasredesneurais_MathematicaRonaldo Ramos da SilvaAinda não há avaliações
- Métodos Matemáticos em Engenharia II: Notas de AulasDocumento14 páginasMétodos Matemáticos em Engenharia II: Notas de Aulasjjci1Ainda não há avaliações
- Plano Anual 8º Ano IDocumento8 páginasPlano Anual 8º Ano IsolangepvhAinda não há avaliações
- Tese DuqueDocumento132 páginasTese DuqueDeejay SM [SOnec Music]Ainda não há avaliações
- 953f3f45-46bf-4e5a-aa8a-18441d318c9aDocumento18 páginas953f3f45-46bf-4e5a-aa8a-18441d318c9aJosemar Pereira da SilvaAinda não há avaliações
- ata-da-329Documento9 páginasata-da-329Josemar Pereira da SilvaAinda não há avaliações
- Cap 01Documento30 páginasCap 01Josemar Pereira da SilvaAinda não há avaliações
- Lei de Hess: entalpia depende apenas do estado inicial e finalDocumento18 páginasLei de Hess: entalpia depende apenas do estado inicial e finalJosemar Pereira da SilvaAinda não há avaliações
- Plano de EnsinoDocumento3 páginasPlano de EnsinoJosemar Pereira da SilvaAinda não há avaliações
- Resolucao de Equacoes Diferenciais Por Redes NeuraDocumento10 páginasResolucao de Equacoes Diferenciais Por Redes NeuraJosemar Pereira da SilvaAinda não há avaliações
- Introdução ao Software GNU OctaveDocumento45 páginasIntrodução ao Software GNU OctaveJosemar Pereira da Silva100% (1)
- 9628-Texto Do Artigo-13891-1-10-20180807Documento2 páginas9628-Texto Do Artigo-13891-1-10-20180807Josemar Pereira da SilvaAinda não há avaliações
- Instrumentos de TemperaturaDocumento22 páginasInstrumentos de TemperaturaWilliam Hertz GanzenmüllerAinda não há avaliações
- Introdução À Programação em JuliaDocumento1 páginaIntrodução À Programação em JuliaJosemar Pereira da SilvaAinda não há avaliações
- Ementa Tutorial Da Linguagem Julia para OtimizacaoDocumento1 páginaEmenta Tutorial Da Linguagem Julia para OtimizacaoJosemar Pereira da SilvaAinda não há avaliações
- Introduoprogamaocom OctaveDocumento68 páginasIntroduoprogamaocom OctaveJosemar Pereira da SilvaAinda não há avaliações
- Ementa Tutorial Da Linguagem Julia para OtimizacaoDocumento1 páginaEmenta Tutorial Da Linguagem Julia para OtimizacaoJosemar Pereira da SilvaAinda não há avaliações
- Cardapio Josemar Pereira Da Silva 10Documento6 páginasCardapio Josemar Pereira Da Silva 10Josemar Pereira da SilvaAinda não há avaliações
- Eq481 UnidadesDocumento6 páginasEq481 UnidadesEdsonMarcondesAinda não há avaliações
- WEG Sca 05 Manual Da Comunicacao Profibus DP 0899.5818 Manual Portugues BRDocumento26 páginasWEG Sca 05 Manual Da Comunicacao Profibus DP 0899.5818 Manual Portugues BRginaldo35Ainda não há avaliações
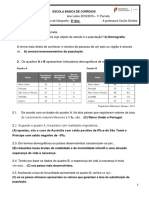
- Demografia 8o Ano - Correção Ficha TrabalhoDocumento8 páginasDemografia 8o Ano - Correção Ficha TrabalhoSala de EstudoAinda não há avaliações
- Aula 06 - Matemática - Henrique Maia - Potenciação e RadiciaçãoDocumento4 páginasAula 06 - Matemática - Henrique Maia - Potenciação e RadiciaçãoHenrique MaiaAinda não há avaliações
- Tecnicas de Operacao 915 CDocumento37 páginasTecnicas de Operacao 915 CRonald Alexs Lopez Aguilar100% (2)
- Aplicação de Válvulas Redutoras de Pressão Na Redução de Perdas Reais em Redes de Distribuição de Água Na Unidade de Neócio Leste - SabespDocumento93 páginasAplicação de Válvulas Redutoras de Pressão Na Redução de Perdas Reais em Redes de Distribuição de Água Na Unidade de Neócio Leste - SabespRafael HoraAinda não há avaliações
- Lista de exercícios matemáticosDocumento2 páginasLista de exercícios matemáticosSamuel Vilela de LimaAinda não há avaliações
- Antissuborno PDFDocumento63 páginasAntissuborno PDFAna Cristina SouzaAinda não há avaliações
- Roteiro PIC2021 G2 Ciclo6Documento25 páginasRoteiro PIC2021 G2 Ciclo6Nickerson OliveiraAinda não há avaliações
- Questões Física II ADocumento2 páginasQuestões Física II AErikikoAinda não há avaliações
- Medidas de posição estatísticasDocumento17 páginasMedidas de posição estatísticasLucas Henrique AndradeAinda não há avaliações
- Dissonâncias rítmica e métrica: uma análise conceitualDocumento7 páginasDissonâncias rítmica e métrica: uma análise conceitualEliana Guglielmetti SulpicioAinda não há avaliações
- Fundamentos de Eletrotécnica para Técnicos em EletrônicaDocumento221 páginasFundamentos de Eletrotécnica para Técnicos em EletrônicaVilson Pimmel100% (1)
- Funções Polinomiais do 2o Grau: Trajetórias e AplicaçõesDocumento28 páginasFunções Polinomiais do 2o Grau: Trajetórias e AplicaçõesPapiro ReceitaAinda não há avaliações
- Ficha Matematica Trimestral FINALDocumento8 páginasFicha Matematica Trimestral FINALDulce PintoAinda não há avaliações
- Guia para certificação PBQP-HDocumento26 páginasGuia para certificação PBQP-HLorena SoaresAinda não há avaliações
- Apostila de Programação de Computadores 1Documento441 páginasApostila de Programação de Computadores 1anaccoAinda não há avaliações
- Eletrização e Princípios da EletrostáticaDocumento29 páginasEletrização e Princípios da EletrostáticaEvandroVianaAinda não há avaliações
- Multiplexadores e Demultiplexadores (ART159)Documento12 páginasMultiplexadores e Demultiplexadores (ART159)Valdir JuniorAinda não há avaliações
- ART Desmontagem e Montagem de PneusDocumento8 páginasART Desmontagem e Montagem de PneusGustavo MauryAinda não há avaliações
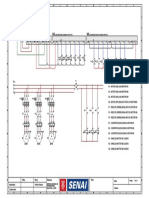
- Esquema elétrico de um sistema de controle de motoresDocumento1 páginaEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaAinda não há avaliações
- Lista Afim Quad Mod ExtraDocumento71 páginasLista Afim Quad Mod ExtraCristina MariaAinda não há avaliações
- Relatório de FlambagemDocumento26 páginasRelatório de FlambagemRaphael Rodrigues MirandaAinda não há avaliações
- Isoladas Matematica Do Zero Na FCC Dudan Aula 3 ResolvidoDocumento24 páginasIsoladas Matematica Do Zero Na FCC Dudan Aula 3 ResolvidoDavid XavierAinda não há avaliações
- F228-ListaEx 1 GravitacaoDocumento3 páginasF228-ListaEx 1 GravitacaoJosé Carlos Salles JuniorAinda não há avaliações
- Métodos emergentes de conservação de alimentos por radiação microondasDocumento39 páginasMétodos emergentes de conservação de alimentos por radiação microondasMárcia RodriguesAinda não há avaliações
- MPCDocumento19 páginasMPCRúben BarbosaAinda não há avaliações
- IA 1 - Resolução de Problemas Por Meio de BuscasDocumento27 páginasIA 1 - Resolução de Problemas Por Meio de BuscasOsvaldo Geraldo ManjateAinda não há avaliações
- Rosalind KraussDocumento14 páginasRosalind KraussMariana GamaAinda não há avaliações
- 10 1 1 468 539 PDFDocumento295 páginas10 1 1 468 539 PDFVitor HugoAinda não há avaliações
- Índices preçosDocumento6 páginasÍndices preçosClara GomesAinda não há avaliações