Você também pode gostar
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNo EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoAinda não há avaliações
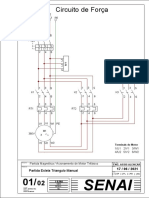
- Circuito de partida estrela triângulo manual para motor trifásicoDocumento2 páginasCircuito de partida estrela triângulo manual para motor trifásicoRodrigo F. Neves100% (1)
- Pneumatica Basica-Desenv Circ ComandoDocumento38 páginasPneumatica Basica-Desenv Circ ComandoJoaquim TomazAinda não há avaliações
- Esquemas Pneum - TicosDocumento38 páginasEsquemas Pneum - Ticosrfelippe8733100% (1)
- Lista de Exercícios 1 - SHPII - Rev00Documento18 páginasLista de Exercícios 1 - SHPII - Rev00jrandrade_engenharia50% (2)
- L#1 Lista Exercicios Automação EPDocumento7 páginasL#1 Lista Exercicios Automação EPPedro Henrique FerreiraAinda não há avaliações
- Prova de CLPDocumento2 páginasProva de CLPdanielfortal67% (3)
- Desenho de Construções Geométricas Básicas em AutoCADDocumento120 páginasDesenho de Construções Geométricas Básicas em AutoCADthunderarockAinda não há avaliações
- 15 Falhas em Motores de Indução Trifásica Estudo de Caso. Pág. e 166 180Documento15 páginas15 Falhas em Motores de Indução Trifásica Estudo de Caso. Pág. e 166 180Pedroerico Motozinho100% (1)
- Comandos eletropneumáticos método passo-a-passoDocumento18 páginasComandos eletropneumáticos método passo-a-passoYao FangAinda não há avaliações
- UC4 - Eletricidade I PDFDocumento71 páginasUC4 - Eletricidade I PDFSIDESIO MARTINS DA SILVAAinda não há avaliações
- Estudo AutomatismosDocumento4 páginasEstudo AutomatismosJoão Miguel PintoAinda não há avaliações
- Motor MonofásicoDocumento38 páginasMotor MonofásicoËstêvão Garcia Luanda100% (1)
- Mesa Cartesiana CLP CascataDocumento2 páginasMesa Cartesiana CLP CascataLOURISVAN COSTA100% (1)
- Medidas de Prevenção Contra Incêndio - Manutencao - (Susana Bernardo)Documento13 páginasMedidas de Prevenção Contra Incêndio - Manutencao - (Susana Bernardo)Pedro TeixeiraAinda não há avaliações
- Chave de partida estrela-triângulo para motores de induçãoDocumento30 páginasChave de partida estrela-triângulo para motores de induçãoEvelyn Thainá Ruppenthal100% (1)
- Folha de Resposta - Atividade 02Documento3 páginasFolha de Resposta - Atividade 02welisson souza0% (1)
- Aulas Teorico-Praticas - PneumaticaDocumento171 páginasAulas Teorico-Praticas - PneumaticaGuilherme FranzoiAinda não há avaliações
- Circuitos de Potência e Comando de Motores ElétricosDocumento20 páginasCircuitos de Potência e Comando de Motores ElétricosJoaquim Pedro Sule CoutinhoAinda não há avaliações
- CONCURSO ELETRÔNICA IFALDocumento20 páginasCONCURSO ELETRÔNICA IFALOliveira JMAinda não há avaliações
- Proteção contra descargas atmosféricasDocumento31 páginasProteção contra descargas atmosféricasBernardo SarretaAinda não há avaliações
- Sistemas Pneumáticos e ComandosDocumento9 páginasSistemas Pneumáticos e ComandosSilas SouzaAinda não há avaliações
- Projeto Plano Curso CAD SIMU V1.0Documento54 páginasProjeto Plano Curso CAD SIMU V1.0Cicero MelloAinda não há avaliações
- Manual CADe SIMU Na PráticaDocumento32 páginasManual CADe SIMU Na PráticaBruno SantosAinda não há avaliações
- Manual eletroimã experiênciasDocumento21 páginasManual eletroimã experiênciasjcmora22Ainda não há avaliações
- Unidade 1 - S1 PDFDocumento44 páginasUnidade 1 - S1 PDFAldeci Ferreira CostaAinda não há avaliações
- Festo CLP PLC ExerciciosDocumento8 páginasFesto CLP PLC ExerciciosGVS-Valentim100% (1)
- Dispositivo colocação tampasDocumento3 páginasDispositivo colocação tampasProfessor Aires, Jeferson Fernando PereiraAinda não há avaliações
- Exercícios - Comandos ElétricosDocumento7 páginasExercícios - Comandos ElétricosGlauber Beranger JuniorAinda não há avaliações
- Montagem e instalação de chave magnética para partida direta com reversão de motor trifásicoDocumento34 páginasMontagem e instalação de chave magnética para partida direta com reversão de motor trifásicoMARCOSAinda não há avaliações
- Circuitos com Diodo: Retificação e Conversão de Tensão CA em CCDocumento37 páginasCircuitos com Diodo: Retificação e Conversão de Tensão CA em CCNataniel AlcinoAinda não há avaliações
- Sistemas Digitais Laboratório TTLDocumento64 páginasSistemas Digitais Laboratório TTLCristiano BragaAinda não há avaliações
- Constituintes de AutomatismoDocumento5 páginasConstituintes de AutomatismoManuel António Pires AbraçosAinda não há avaliações
- Projeto Filtro RLC Elimina Ruídos Rede ElétricaDocumento2 páginasProjeto Filtro RLC Elimina Ruídos Rede ElétricaWiiL DJ0% (1)
- Workshop Comandos Eletricos Expert Material de Estudos - Aula01Documento28 páginasWorkshop Comandos Eletricos Expert Material de Estudos - Aula01mezaneyraAinda não há avaliações
- Cat Logo de Hidr Ulica Vers o 2012 IDocumento88 páginasCat Logo de Hidr Ulica Vers o 2012 IIOZEF1Ainda não há avaliações
- Apresentação ContactorDocumento23 páginasApresentação ContactorTony Fast100% (1)
- Diagramas lógicos e ladderDocumento7 páginasDiagramas lógicos e ladderthadthAinda não há avaliações
- Capítulo 3Documento30 páginasCapítulo 3Abelardo Zcarias CardenasAinda não há avaliações
- Exercicio Ladder + Elétro PneumáticoDocumento1 páginaExercicio Ladder + Elétro PneumáticohenriquefmAinda não há avaliações
- Simulacao Partida Estrela TriânguloDocumento1 páginaSimulacao Partida Estrela TriânguloJeferson PaulistaAinda não há avaliações
- Driver MOSFET para motor brushlessDocumento3 páginasDriver MOSFET para motor brushlessdiegoAinda não há avaliações
- Introdução aos Controladores Lógicos Programáveis (CLPDocumento41 páginasIntrodução aos Controladores Lógicos Programáveis (CLPAMINTA MANZANILLAAinda não há avaliações
- Exercício de Pneumática Sequencial Com BancadaDocumento12 páginasExercício de Pneumática Sequencial Com Bancadatazmania100% (1)
- Finder CFTV Heading MundialfireDocumento400 páginasFinder CFTV Heading MundialfireFelipe SuzartAinda não há avaliações
- Fundamentals of Digital Logic With Verilog Design (Stephen Brown, Zvonko Vranesic) (Z-Library) (001-300)Documento300 páginasFundamentals of Digital Logic With Verilog Design (Stephen Brown, Zvonko Vranesic) (Z-Library) (001-300)Sr PapiuissAinda não há avaliações
- Manual UJT JFET osciladorDocumento16 páginasManual UJT JFET osciladorFredcrdguiAinda não há avaliações
- Apostila EG3000 2009 m11Documento471 páginasApostila EG3000 2009 m11Fabricio Santos100% (2)
- S7-GRAPH - Primeiros Passos Com S7 GRAPHDocumento19 páginasS7-GRAPH - Primeiros Passos Com S7 GRAPHEdvin RuanAinda não há avaliações
- Circuito pneumático com ciclo único e ciclo contínuoDocumento2 páginasCircuito pneumático com ciclo único e ciclo contínuoGabriel AndrelloAinda não há avaliações
- Dimensionamento de circuitos elétricosDocumento2 páginasDimensionamento de circuitos elétricosJuvenil Júnior100% (1)
- Diagnosticar e Solucionar Falhas e Avarias Mecânicas em Equipamentos IndustriaisDocumento6 páginasDiagnosticar e Solucionar Falhas e Avarias Mecânicas em Equipamentos IndustriaisildoAinda não há avaliações
- Seleção de sensores para envaseDocumento1 páginaSeleção de sensores para envaseRoberson Correa100% (1)
- Esquema de Força e Comando Chave Compensadora Com ReversãoDocumento18 páginasEsquema de Força e Comando Chave Compensadora Com ReversãomateusheAinda não há avaliações
- Cursos profissionais de manutenção e electromecânicaDocumento39 páginasCursos profissionais de manutenção e electromecânicaJoão Baptista100% (1)
- Laboratório 3 Transformador Monofásico. EnsaiosDocumento17 páginasLaboratório 3 Transformador Monofásico. EnsaiosgersonhzpAinda não há avaliações
- Aula 7 - Sensoriamento e InstrumentaçãoDocumento65 páginasAula 7 - Sensoriamento e InstrumentaçãoAriel TonAinda não há avaliações
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- Circuitos EletropneumáticosDocumento4 páginasCircuitos EletropneumáticosRomulo PiresAinda não há avaliações
- Condições marginais ciclo único e contínuo circuitos eletropneumáticosDocumento14 páginasCondições marginais ciclo único e contínuo circuitos eletropneumáticosRomulo PiresAinda não há avaliações
- Introdução às propriedades de fluidos alimentaresDocumento37 páginasIntrodução às propriedades de fluidos alimentaresRomulo PiresAinda não há avaliações
- Dimensionamento Da TubulaçãoDocumento1 páginaDimensionamento Da TubulaçãoRomulo PiresAinda não há avaliações
- 01 SimbologiaDocumento29 páginas01 SimbologiaRomulo PiresAinda não há avaliações
- Ar Limpo para IndústriasDocumento7 páginasAr Limpo para IndústriasRomulo PiresAinda não há avaliações
- Dimensionamento de cilindros pneumáticosDocumento10 páginasDimensionamento de cilindros pneumáticosRomulo PiresAinda não há avaliações
- Preparação do ar comprimido: secagem e distribuiçãoDocumento3 páginasPreparação do ar comprimido: secagem e distribuiçãoRomulo PiresAinda não há avaliações
- Instrumentação e controle de processos industriaisDocumento160 páginasInstrumentação e controle de processos industriaisRomulo PiresAinda não há avaliações
- Medição de Vazão com Princípios FísicosDocumento108 páginasMedição de Vazão com Princípios FísicosRomulo PiresAinda não há avaliações
- Projeto 1-Grampo FixoDocumento3 páginasProjeto 1-Grampo FixoRomulo Pires100% (2)
- Msalles Engenharia ME - Portfólio EletromecânicaDocumento5 páginasMsalles Engenharia ME - Portfólio EletromecânicaRomulo PiresAinda não há avaliações
- Cálculo de resistência à tração de chapa e tuboDocumento2 páginasCálculo de resistência à tração de chapa e tuboRomulo PiresAinda não há avaliações
- Instrumentação e controle de processos industriaisDocumento17 páginasInstrumentação e controle de processos industriaisRomulo PiresAinda não há avaliações
- Instrumentação Básica 1Documento84 páginasInstrumentação Básica 1Romulo PiresAinda não há avaliações
- Manutenção Preventiva em Tornos CNC: Estudo de Caso em Uma Empresa Prestadora de ServiçosDocumento12 páginasManutenção Preventiva em Tornos CNC: Estudo de Caso em Uma Empresa Prestadora de ServiçosManasses juniorAinda não há avaliações
- C 1020 18 - Por PDFDocumento53 páginasC 1020 18 - Por PDFBruno JuniorAinda não há avaliações
- Lista1 CorrigidaDocumento4 páginasLista1 CorrigidaJanderson CarvalhoAinda não há avaliações
- Desenho de Orelhas de Mickey Mouse para Colorir - TudodesenhosDocumento1 páginaDesenho de Orelhas de Mickey Mouse para Colorir - TudodesenhosRomulo PiresAinda não há avaliações
- Artigo para Orientacao Do TCC Comentado UCAMDocumento11 páginasArtigo para Orientacao Do TCC Comentado UCAMGoncalvesMarceloAinda não há avaliações
- 4 MovimentacaoDocumento53 páginas4 MovimentacaoEmerson OliveiraAinda não há avaliações
- Contrato de EngenhariaDocumento4 páginasContrato de Engenhariasolon_souzaAinda não há avaliações
- Exercicios de MetrologiaDocumento23 páginasExercicios de MetrologiaRomulo PiresAinda não há avaliações
- 5 Proposta de Implantação de Manutenção Preventiva em Um Centro de Usinagem Vertical Um Estudo de CasoDocumento27 páginas5 Proposta de Implantação de Manutenção Preventiva em Um Centro de Usinagem Vertical Um Estudo de Casohjdsofp]aAinda não há avaliações
- Celulas de ManufaturaDocumento20 páginasCelulas de ManufaturaEduardo MinasAinda não há avaliações
- Abnt NBR 8400 Calculo de Equip Amen To para Levantamento E Movimentacao de CargasDocumento108 páginasAbnt NBR 8400 Calculo de Equip Amen To para Levantamento E Movimentacao de Cargasgqtt100% (2)
- Elementos de MáquinasDocumento33 páginasElementos de MáquinasRenata DouradoAinda não há avaliações
- A Gestc3a3o Da Manutenc3a7c3a3o IndustrialDocumento19 páginasA Gestc3a3o Da Manutenc3a7c3a3o IndustrialJose Augusto Diniz Do AmaralAinda não há avaliações
- Tabela de Honorários Profissionais para Engenharia e AgronomiaDocumento40 páginasTabela de Honorários Profissionais para Engenharia e AgronomiaDelly GonçalvesAinda não há avaliações