Você também pode gostar
- Execícios 1Documento3 páginasExecícios 1ranier_s1100% (1)
- Algoritmos e Programação (Prática) : Profa. Andreza Leite Andreza - Leite@Documento35 páginasAlgoritmos e Programação (Prática) : Profa. Andreza Leite Andreza - Leite@Eng. Eletricista - José Antonio RodriguesAinda não há avaliações
- 02 - Algoritmos e Programação Estruturada - Programação Estruturada para DevDocumento97 páginas02 - Algoritmos e Programação Estruturada - Programação Estruturada para DevRoberto VilelaAinda não há avaliações
- Anexo 1 - Caderno Do Prof Tecnologia e Inovação 1º BimDocumento43 páginasAnexo 1 - Caderno Do Prof Tecnologia e Inovação 1º BimMatlouco100% (1)
- Inteligencia ArtificialDocumento5 páginasInteligencia ArtificialSilvia PearsonAinda não há avaliações
- Paper07 en PTDocumento9 páginasPaper07 en PTAdriano MedeirosAinda não há avaliações
- Texto 04 - Capítulo 2.3.2 - Propriedades de Ambientes de TarefasDocumento4 páginasTexto 04 - Capítulo 2.3.2 - Propriedades de Ambientes de TarefasEdinaldo PereiraAinda não há avaliações
- Aula 1 - Lógica de ProgramaçãoDocumento19 páginasAula 1 - Lógica de ProgramaçãovaldirferreiraAinda não há avaliações
- Arquitetura Lógica e PadrõesDocumento20 páginasArquitetura Lógica e PadrõesAntonio PassosAinda não há avaliações
- Bowen BakerDocumento13 páginasBowen BakerProper OneAinda não há avaliações
- 26 - Todas As AulasDocumento197 páginas26 - Todas As AulasRbinhoAinda não há avaliações
- Aula 01Documento109 páginasAula 01josueAinda não há avaliações
- Paper 2Documento4 páginasPaper 2Gustavo Nasser MazzoAinda não há avaliações
- Trybe LogicaProgramacaoDocumento17 páginasTrybe LogicaProgramacaoZacarias TavaresAinda não há avaliações
- Lista1b PDFDocumento3 páginasLista1b PDFRicardo de AlmeidaAinda não há avaliações
- N2 - Gestão de Projetos ÁgeisDocumento5 páginasN2 - Gestão de Projetos ÁgeisVanderson Clayton100% (1)
- IIA Sebenta 2014Documento69 páginasIIA Sebenta 2014João CamposAinda não há avaliações
- 04 - Abordagem Neurodinâmica de Aprendizagem Por ReforçoDocumento5 páginas04 - Abordagem Neurodinâmica de Aprendizagem Por ReforçoRafael SimbaAinda não há avaliações
- Aula Tecnologia - Lógica de ProgramaçãoDocumento7 páginasAula Tecnologia - Lógica de ProgramaçãoclaudiomoriAinda não há avaliações
- Notas Digitais: B.Tech (I Ano - Ii Sem) (2018-19)Documento93 páginasNotas Digitais: B.Tech (I Ano - Ii Sem) (2018-19)ScribdTranslationsAinda não há avaliações
- Trabalho de Conclusão de Curso PDFDocumento28 páginasTrabalho de Conclusão de Curso PDFMarcos Vinícius MontanariAinda não há avaliações
- Modulo 1 - PSIDocumento24 páginasModulo 1 - PSIAna AlmeidaAinda não há avaliações
- Port 2 IADocumento4 páginasPort 2 IAMarco Tulio SoaresAinda não há avaliações
- Ac Joa Pau Inf 501Documento7 páginasAc Joa Pau Inf 501SadraqueAinda não há avaliações
- Lis Sis Tempo RealDocumento8 páginasLis Sis Tempo Realquio100Ainda não há avaliações
- Machine Learning para NegcioDocumento61 páginasMachine Learning para Negciosamuel souzaAinda não há avaliações
- Apostila Logica 110210 PDFDocumento42 páginasApostila Logica 110210 PDFVictor SouzaAinda não há avaliações
- 4 Agentes de Software: 4.1. PreliminaresDocumento25 páginas4 Agentes de Software: 4.1. PreliminaresMaria Inês Vasconcellos FurtadoAinda não há avaliações
- Apostila Logica 110210Documento42 páginasApostila Logica 110210Maellson MarquesAinda não há avaliações
- Inteligencia ArtificialDocumento6 páginasInteligencia ArtificialLui ʕ •ᴥ•ʔAinda não há avaliações
- Projeto Integrado II - EM CONCLUSÃODocumento6 páginasProjeto Integrado II - EM CONCLUSÃOMaria EduardaAinda não há avaliações
- LogicaDocumento45 páginasLogicadouradoeduardo05Ainda não há avaliações
- Teoria Aula Esw 7Documento11 páginasTeoria Aula Esw 7Efefante CicaAinda não há avaliações
- Campus VirtualDocumento19 páginasCampus VirtualyurydariasAinda não há avaliações
- Ebook Deep Learning Project GuideDocumento11 páginasEbook Deep Learning Project GuideDanielAinda não há avaliações
- Grasp 01 02Documento23 páginasGrasp 01 02Rômulo Deroci da RochaAinda não há avaliações
- Linguagens de Programação para Sistemas de Tempo RealDocumento8 páginasLinguagens de Programação para Sistemas de Tempo RealDiegoAlberto100% (2)
- Ciclo 2 - Algoritmos para Problemas de Regressão - Fundamentos de Machine LearningDocumento25 páginasCiclo 2 - Algoritmos para Problemas de Regressão - Fundamentos de Machine LearningRafael PickbrennerAinda não há avaliações
- Aula 01 - AbstraçãoDocumento9 páginasAula 01 - AbstraçãoLeonardo Sousa AmorimAinda não há avaliações
- Tarefa Banco de Dados 28 Do 02Documento2 páginasTarefa Banco de Dados 28 Do 02Daphne MartinsAinda não há avaliações
- Apostila Algoritmo PDFDocumento97 páginasApostila Algoritmo PDFMatheus RodriguesAinda não há avaliações
- E-Book Gratuito: 4 Etapas Do Treinamento de Alto RendimentoDocumento15 páginasE-Book Gratuito: 4 Etapas Do Treinamento de Alto Rendimentosamuel nunesAinda não há avaliações
- Atividade Estruturada Linguagem de Programação Av21 - ArqnovocommatriculaDocumento2 páginasAtividade Estruturada Linguagem de Programação Av21 - ArqnovocommatriculaMauricio ConstantinoAinda não há avaliações
- IJSC Paper 4 946-952Documento7 páginasIJSC Paper 4 946-952ANTONIO LISTER AZEVEDO SOUSAAinda não há avaliações
- Projeto Integrado II - EM CONCLUSÃODocumento6 páginasProjeto Integrado II - EM CONCLUSÃOMaria EduardaAinda não há avaliações
- Introdução A Linguagem Java FapiDocumento62 páginasIntrodução A Linguagem Java FapilezinhovsbAinda não há avaliações
- Porque N o Aumentar Atributos em Old DragonDocumento8 páginasPorque N o Aumentar Atributos em Old DragonJeferson MoreiraAinda não há avaliações
- Aula 1 - Lpa - UninassauDocumento21 páginasAula 1 - Lpa - Uninassaurenata sharline SantanaAinda não há avaliações
- 01 ParadigmasDocumento60 páginas01 ParadigmasXavier JoaquimAinda não há avaliações
- TeoricoDocumento26 páginasTeoricoalexdev.souzaAinda não há avaliações
- Ficha 04 RobóticaDocumento2 páginasFicha 04 RobóticaLeonelSoaresAinda não há avaliações
- LivroProgramação FuncionalDocumento180 páginasLivroProgramação FuncionalRafaelAragãoAinda não há avaliações
- ACFrOgC7jnnUKAznBvL1eFd6K Zg01ADtvv2xtwqgfW4tkbpu XGhQ0Ke9h9 WtBCOV QYT5dSdrY8MC8SmrFOa8 r5CgQqp8LfwZ8AJxf34RRtogSe5tjcC0Xrk8QMa5iOeiC AGlfCMlqg2MdSDocumento128 páginasACFrOgC7jnnUKAznBvL1eFd6K Zg01ADtvv2xtwqgfW4tkbpu XGhQ0Ke9h9 WtBCOV QYT5dSdrY8MC8SmrFOa8 r5CgQqp8LfwZ8AJxf34RRtogSe5tjcC0Xrk8QMa5iOeiC AGlfCMlqg2MdSJaqueline DiasAinda não há avaliações
- Tema 2 - ScrumDocumento17 páginasTema 2 - ScrumJesse FilipeAinda não há avaliações
- Aula02 IADocumento34 páginasAula02 IACleyton RodriguesAinda não há avaliações
- Algoritmos - Lógica para Desenvolvimento de Programação PDFDocumento36 páginasAlgoritmos - Lógica para Desenvolvimento de Programação PDFCamila Ferreira Dias100% (1)
- Al AulasprogramaDocumento75 páginasAl AulasprogramaCaique FerreiraAinda não há avaliações
- Semana 1 - Aprendizado de Máquinas. Tipos de Aprendizado. Árvores de DecisãoDocumento13 páginasSemana 1 - Aprendizado de Máquinas. Tipos de Aprendizado. Árvores de DecisãoKlöry BrásAinda não há avaliações
- AstrolabeDocumento8 páginasAstrolabeAndreBandeiraAinda não há avaliações
- Complexidade de AlgoritmosDocumento2 páginasComplexidade de AlgoritmosDiego AntonioAinda não há avaliações
- Cond Eldorado Park - Projeto Executivo - ÁtraarquiteturaDocumento26 páginasCond Eldorado Park - Projeto Executivo - ÁtraarquiteturaGilberto MourãoAinda não há avaliações
- EditalDocumento18 páginasEditalGilberto MourãoAinda não há avaliações
- TermoCompromissoEstagioThaylon 2021 1assinadoDocumento3 páginasTermoCompromissoEstagioThaylon 2021 1assinadoGilberto MourãoAinda não há avaliações
- Some DocDocumento4 páginasSome DocGilberto MourãoAinda não há avaliações
- Test 3Documento12 páginasTest 3Gilberto MourãoAinda não há avaliações
- Análise Música Tempos ModernosDocumento1 páginaAnálise Música Tempos ModernosGilberto MourãoAinda não há avaliações
- Test 2Documento2 páginasTest 2Gilberto MourãoAinda não há avaliações
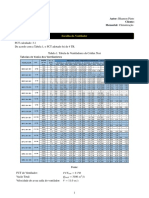
- Prova 1 - Medição de Energia - 2021-2Documento3 páginasProva 1 - Medição de Energia - 2021-2Gilberto MourãoAinda não há avaliações
- Linguagem de Programação Dos Controladores ProgramáveisDocumento49 páginasLinguagem de Programação Dos Controladores ProgramáveisGilberto MourãoAinda não há avaliações
- Resumo Das Etapas Iniciais de Um Projeto de Subestações de ForçaDocumento11 páginasResumo Das Etapas Iniciais de Um Projeto de Subestações de ForçaGilberto MourãoAinda não há avaliações
- Redes Recorrentes e LSTMDocumento18 páginasRedes Recorrentes e LSTMGilberto MourãoAinda não há avaliações
- Script CompletoDocumento12 páginasScript CompletoGilberto MourãoAinda não há avaliações
- Cap.03 O Professor Como DiscipuladorDocumento5 páginasCap.03 O Professor Como DiscipuladorJohn Wesley PedrinhaAinda não há avaliações
- Terapia Comportamental Questão Teórica e PráticasDocumento37 páginasTerapia Comportamental Questão Teórica e PráticasRaquel ConstantinoAinda não há avaliações
- Tese Auto-Organização, Processo Pedagógico InovadorDocumento185 páginasTese Auto-Organização, Processo Pedagógico InovadorSchrley SchramAinda não há avaliações
- Redação Nota 1000 - o Guia Estratégico 2.0Documento10 páginasRedação Nota 1000 - o Guia Estratégico 2.0Lucidalva LopesAinda não há avaliações
- 11 Erros Que Matam Sua Lucratividade No Poker PDFDocumento20 páginas11 Erros Que Matam Sua Lucratividade No Poker PDFMarcus Monteiro100% (1)
- 2 VA - VERIFICAÇÃO DE APRENDIZAGEM - Revisão Da TentativaDocumento11 páginas2 VA - VERIFICAÇÃO DE APRENDIZAGEM - Revisão Da Tentativaraquelrosa95xAinda não há avaliações
- Educação A DistânciaDocumento326 páginasEducação A DistânciaDnery JúniorAinda não há avaliações
- As Responsabilidades Do DiretorDocumento20 páginasAs Responsabilidades Do DiretorKatia DiasAinda não há avaliações
- Helena Do Nascimento MenesesDocumento16 páginasHelena Do Nascimento MenesesRaphael GarcêzAinda não há avaliações
- Manual de Estagio - Enfermagem 2019 FSADocumento52 páginasManual de Estagio - Enfermagem 2019 FSAmuriloAinda não há avaliações
- EtinomatDocumento220 páginasEtinomatDaniel Gondim ProfessorAinda não há avaliações
- 2.º Caderno de Intervenção Cultural e Educação Artística Pensar A Ação em Investigação e Intervenção ArtísticaDocumento158 páginas2.º Caderno de Intervenção Cultural e Educação Artística Pensar A Ação em Investigação e Intervenção ArtísticaSilvia GomesAinda não há avaliações
- Darsand, O Ato de AvaliarDocumento11 páginasDarsand, O Ato de AvaliarFlávio SantiagoAinda não há avaliações
- Comer NutrirDocumento26 páginasComer NutrirSara MoreiraAinda não há avaliações
- Cli U1Documento58 páginasCli U1Viviane PomboAinda não há avaliações
- Biofísica CelularDocumento3 páginasBiofísica CelularefreitasAinda não há avaliações
- Portifólio Sobre o Trabalho Do Pedagogo 10.05.13Documento4 páginasPortifólio Sobre o Trabalho Do Pedagogo 10.05.13gauchoguitarAinda não há avaliações
- Cópia de TRABALHO DE CONCLUSAO DE CURSO DE PEDAGOGIA UNIPLAN.2022Documento48 páginasCópia de TRABALHO DE CONCLUSAO DE CURSO DE PEDAGOGIA UNIPLAN.2022karineluisa1812Ainda não há avaliações
- Teoria de Jean Piaget e VygotskyDocumento3 páginasTeoria de Jean Piaget e VygotskyFabio BrussoloAinda não há avaliações
- Linguagem Corporal 1a12 PDFDocumento70 páginasLinguagem Corporal 1a12 PDFRenata De Negreiros Mendes100% (5)
- Breve Descrição Sobre Processos GrupaisDocumento75 páginasBreve Descrição Sobre Processos GrupaisO.L.D.E.Ainda não há avaliações
- Luis Ausse - DissertaçãoDocumento93 páginasLuis Ausse - DissertaçãoGerson ManjateAinda não há avaliações
- Boletins Ostensivos História Do GBS 2Documento41 páginasBoletins Ostensivos História Do GBS 2asphenautAinda não há avaliações
- A Presença Dos Mortos No Caminho Espiritual REVISADODocumento94 páginasA Presença Dos Mortos No Caminho Espiritual REVISADOVanessa ArantesAinda não há avaliações
- Desafios Da EducaçãoDocumento13 páginasDesafios Da EducaçãoSt.SusanaAinda não há avaliações
- E-Book BialDocumento12 páginasE-Book BialLaís BarbosaAinda não há avaliações
- E-Book Da Unidade - Saúde e Bem-Estar PsicológicoDocumento64 páginasE-Book Da Unidade - Saúde e Bem-Estar PsicológicoLuhan Oliveira DiasAinda não há avaliações
- Exu Nas Escolas Uma Proposta Didatico MetodologicaDocumento14 páginasExu Nas Escolas Uma Proposta Didatico MetodologicaWolffi S. SantanaAinda não há avaliações
- Dialografias Psicogravadas - Texto BrutoDocumento4 páginasDialografias Psicogravadas - Texto BrutoLordeEduardoChediackAinda não há avaliações