Você também pode gostar
- Aula 08 - EletropneumáticaDocumento11 páginasAula 08 - EletropneumáticaWAGNER RODRIGUES DE ABREU100% (1)
- Aula Automação EletropneumáticaDocumento121 páginasAula Automação EletropneumáticaRonaldo Majuste100% (1)
- Aula 03 - Elementos PneumáticosDocumento38 páginasAula 03 - Elementos Pneumáticoshjdsofp]a100% (1)
- Instruções de Serviço: Compressor de Parafuso Tipo: AS 47 / 10 BarDocumento76 páginasInstruções de Serviço: Compressor de Parafuso Tipo: AS 47 / 10 BarEvandro Jva compressores100% (1)
- Paineis GA55+90YD Only FFDocumento18 páginasPaineis GA55+90YD Only FFMarcio100% (1)
- Detecção de falhas em motores elétricos por análise de corrente e fluxo magnéticoDocumento35 páginasDetecção de falhas em motores elétricos por análise de corrente e fluxo magnéticoanrsnobre100% (1)
- 653 - 2-Palestra Ar ComprimidoDocumento57 páginas653 - 2-Palestra Ar ComprimidoLuciano Dasilva100% (1)
- Instruções de Serviço: Compressor de Parafuso Tipo: DSD 171/8,5 BarDocumento149 páginasInstruções de Serviço: Compressor de Parafuso Tipo: DSD 171/8,5 BarEvandro Jva compressores100% (1)
- Autoclave - Stermax - Esquema de Ligações - Autoclaves DIGITAISDocumento1 páginaAutoclave - Stermax - Esquema de Ligações - Autoclaves DIGITAISJeanderson Athamay100% (1)
- Instruções de Serviço: Compressor de Parafuso Tipo: M 26Documento92 páginasInstruções de Serviço: Compressor de Parafuso Tipo: M 26Evandro Jva compressores100% (1)
- Rev.4 - TP 25 HP 380VDocumento4 páginasRev.4 - TP 25 HP 380VEletrica Artpress Compressores100% (1)
- V&B Do Brasil TABELA MAR 2023Documento73 páginasV&B Do Brasil TABELA MAR 2023Wendell Targino100% (1)
- Vista explodida do motor MC 8.5 BVDocumento3 páginasVista explodida do motor MC 8.5 BVAlércio RosaAinda não há avaliações
- Rev.3 - TP 10 HP 220VDocumento2 páginasRev.3 - TP 10 HP 220VHércules Meira100% (1)
- Kit e Compressores CompativeisDocumento24 páginasKit e Compressores CompativeisSabrina Magalhães100% (1)
- Ligação refletor LED dentasiaDocumento1 páginaLigação refletor LED dentasiabrisaAinda não há avaliações
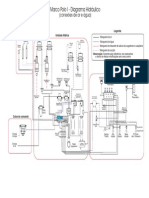
- MarcoPoloI-diagramahidraulicoDocumento1 páginaMarcoPoloI-diagramahidraulicoAlércio Rosa100% (1)
- CT 19 - MS 2.3 JET MASTER - AIR PLUS Port. Rev.02 Mar-08 PDFDocumento4 páginasCT 19 - MS 2.3 JET MASTER - AIR PLUS Port. Rev.02 Mar-08 PDFasashogunAinda não há avaliações
- Aib GX 2-5 - 2011Documento72 páginasAib GX 2-5 - 2011BRUNO MARDEGANAinda não há avaliações
- Apostila de Eletro-HidropneumáticaDocumento124 páginasApostila de Eletro-HidropneumáticaDIVAINE FERREIRA DE ANDRADE100% (1)
- Guia rápido de manutenção de compressorDocumento36 páginasGuia rápido de manutenção de compressorMarcioAinda não há avaliações
- Pneumática Basica SMCDocumento202 páginasPneumática Basica SMCGuilherme Balbuena Jardim100% (1)
- AIB GA7 - 15VSD+ PTDocumento124 páginasAIB GA7 - 15VSD+ PTBRUNO MARDEGAN100% (2)
- 6 Esquema Eletrico GA 18 - 30 VSD FFDocumento3 páginas6 Esquema Eletrico GA 18 - 30 VSD FFRodrigo Augusto Teixeira100% (1)
- 025.0516-0-Manual Trein - Parafuso-Unidades-Linha 2000 e 30Documento54 páginas025.0516-0-Manual Trein - Parafuso-Unidades-Linha 2000 e 30Cristiano RenataAinda não há avaliações
- Diagrama ComandoDocumento2 páginasDiagrama Comandosouzcesar100% (1)
- Manual de Instrucoes Completo TLY29 Rev.1Documento18 páginasManual de Instrucoes Completo TLY29 Rev.1Miguel WalkerAinda não há avaliações
- Contra Ângulo Intra MX CR PDFDocumento1 páginaContra Ângulo Intra MX CR PDFWilson Caveio100% (1)
- Da1500 25VFDocumento1 páginaDa1500 25VFAnderson Luis Marques100% (2)
- 15 Falhas em Motores de Indução Trifásica Estudo de Caso. Pág. e 166 180Documento15 páginas15 Falhas em Motores de Indução Trifásica Estudo de Caso. Pág. e 166 180Pedroerico Motozinho100% (1)
- 7 Esquema Eletrico GA 37 - 55 VSD FFDocumento3 páginas7 Esquema Eletrico GA 37 - 55 VSD FFMarcio100% (1)
- Ajuste de parâmetros da interface eletrônica SRP5000 e FlexDocumento7 páginasAjuste de parâmetros da interface eletrônica SRP5000 e FlexMauro MunizAinda não há avaliações
- CT 343 - CSV 15 220-250 - 20AD - 20-220-250 Port Mar-09Documento5 páginasCT 343 - CSV 15 220-250 - 20AD - 20-220-250 Port Mar-09catalogosmecanicaAinda não há avaliações
- Guia completo sobre equipamento odontológicoDocumento40 páginasGuia completo sobre equipamento odontológicoNilton sergio gomes linsAinda não há avaliações
- Esquema Elétrico Secador MDR 300VDocumento2 páginasEsquema Elétrico Secador MDR 300Vtonnytoons100% (2)
- Be 10Documento7 páginasBe 10Douglas SchusterAinda não há avaliações
- Manual de Instruções GA55 - 90 - 2013 PDFDocumento153 páginasManual de Instruções GA55 - 90 - 2013 PDFMAGNUN FELIPE MACIEL100% (1)
- Manual de Instruções - Compressores Alternativos em Ferro Fundido - Atlas CopcoDocumento28 páginasManual de Instruções - Compressores Alternativos em Ferro Fundido - Atlas CopcoIgor Portenge100% (1)
- Manual de Operação da Unidade de Controle Aerzen AS 200 E PODocumento32 páginasManual de Operação da Unidade de Controle Aerzen AS 200 E POwagner machado de moraes100% (2)
- Chicago Pneumatic Compressor Startup Procedure StepsDocumento8 páginasChicago Pneumatic Compressor Startup Procedure StepsThiago Lins100% (1)
- SRP 3040 E Boletim InformativoDocumento3 páginasSRP 3040 E Boletim InformativoAndré100% (1)
- Salários MagistradosDocumento206 páginasSalários MagistradosMichel F CstlAinda não há avaliações
- V&B DO BRASIL - Distribuidora de equipamentos odontológicosDocumento61 páginasV&B DO BRASIL - Distribuidora de equipamentos odontológicosThiago Silva100% (1)
- Apostila Do Curso de Instrumentacao e Automacao Autoenge SolutuionsDocumento169 páginasApostila Do Curso de Instrumentacao e Automacao Autoenge SolutuionsGuilherme Dias100% (1)
- Relé TérmicoDocumento8 páginasRelé TérmicoRafael Rosa100% (1)
- Lista de Peças Chiaperini 44 ScontoDocumento38 páginasLista de Peças Chiaperini 44 ScontoAlércio Rosa0% (1)
- CATÁLOGO TÉCNICO COMPRESSOR - SRP 3040 - SRP 3040 E. Analógico - Eletrônico CARACTERÍSTICAS TÉCNICAS CT 222 - SRP 3040 - SRP 3040 EDocumento23 páginasCATÁLOGO TÉCNICO COMPRESSOR - SRP 3040 - SRP 3040 E. Analógico - Eletrônico CARACTERÍSTICAS TÉCNICAS CT 222 - SRP 3040 - SRP 3040 EAC COMPRESSORESAinda não há avaliações
- Partida estrela triângulo - redução de tensão e correnteDocumento4 páginasPartida estrela triângulo - redução de tensão e correnteanon_399333424100% (1)
- LD AltaDocumento264 páginasLD AltaJefferson GonçaloAinda não há avaliações
- Dados - Compressor GA 75 Atlas CopcoDocumento1 páginaDados - Compressor GA 75 Atlas CopcoHristos BashalidisAinda não há avaliações
- Manual de Instalacao e Manutencao de Transform Adores Secos - WEGDocumento14 páginasManual de Instalacao e Manutencao de Transform Adores Secos - WEGrdpimentaAinda não há avaliações
- Is Aii-Aif1463 c5 Ga-Z VSDDocumento24 páginasIs Aii-Aif1463 c5 Ga-Z VSDEvandro Jva compressores100% (1)
- M TLY25 IR r3Documento4 páginasM TLY25 IR r3felipefurquim12100% (1)
- WEG cfw500 Referencia Rapida Dos Parametros 10001278059 1.1x Manual Portugues BRDocumento28 páginasWEG cfw500 Referencia Rapida Dos Parametros 10001278059 1.1x Manual Portugues BRandrearaujogomes01100% (1)
- Aib Ga11+ 30 2008Documento81 páginasAib Ga11+ 30 2008BRUNO MARDEGANAinda não há avaliações
- Filtros para ar comprimidoDocumento34 páginasFiltros para ar comprimidoGerenciamentoAinda não há avaliações
- Checagens e Ajustes UniK - Ed.03 - PTESEN-1Documento54 páginasChecagens e Ajustes UniK - Ed.03 - PTESEN-1Jeanderson Athamay100% (1)
- Manual de instruções compressorDocumento18 páginasManual de instruções compressorEdegar56Ainda não há avaliações
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- 9014 - Companhia Energetica Manauara - Weg Motor Scan PDFDocumento2 páginas9014 - Companhia Energetica Manauara - Weg Motor Scan PDFLuiz Otávio PachecoAinda não há avaliações
- Edital 07 Mestrado 2022 Turma 2023Documento20 páginasEdital 07 Mestrado 2022 Turma 2023Luiz Otávio PachecoAinda não há avaliações
- TreinamentoDBSupermercados PDFDocumento6 páginasTreinamentoDBSupermercados PDFLuiz Otávio PachecoAinda não há avaliações
- Catálogo GF2 - BRDocumento61 páginasCatálogo GF2 - BRHallysson NunesAinda não há avaliações
- Sistemas de Comunicação e TelecomunicaçõesDocumento1 páginaSistemas de Comunicação e TelecomunicaçõesLuiz Otávio PachecoAinda não há avaliações
- Promoção Coca-Cola com sorteios e prêmiosDocumento14 páginasPromoção Coca-Cola com sorteios e prêmiosLuiz Otávio PachecoAinda não há avaliações
- Modelagem de Sistemas EaDDocumento3 páginasModelagem de Sistemas EaDLuiz Otávio PachecoAinda não há avaliações
- Ute Manauara: 7.1.14 Pole Slip Pslip 78PsDocumento3 páginasUte Manauara: 7.1.14 Pole Slip Pslip 78PsLuiz Otávio PachecoAinda não há avaliações
- Curso de Férias 1o Ano Ensino MédioDocumento1 páginaCurso de Férias 1o Ano Ensino MédioLuiz Otávio PachecoAinda não há avaliações
- Conexão microgeradores rede distribuiçãoDocumento2 páginasConexão microgeradores rede distribuiçãoLuiz Otávio PachecoAinda não há avaliações
- MANUAL DE OPERAÇÃO E MANUTENÇÃO DA ESTAÇÃO DE REDUÇÃO DE PRESSÃO DE GÁSDocumento12 páginasMANUAL DE OPERAÇÃO E MANUTENÇÃO DA ESTAÇÃO DE REDUÇÃO DE PRESSÃO DE GÁSLuiz Otávio PachecoAinda não há avaliações
- 03-Curso Ensaios Eletricos LACTECDocumento91 páginas03-Curso Ensaios Eletricos LACTECbanzeiro100% (5)
- Telhado Zipado - Linha EconômicaDocumento1 páginaTelhado Zipado - Linha EconômicaLuiz Otávio PachecoAinda não há avaliações
- Catalogo 2021Documento26 páginasCatalogo 2021Luiz Otávio PachecoAinda não há avaliações
- Formulário de Cadastro de Unidades No Sistema de Compensação 1Documento4 páginasFormulário de Cadastro de Unidades No Sistema de Compensação 1Luiz Otávio PachecoAinda não há avaliações
- Conexão microgeradores rede distribuiçãoDocumento2 páginasConexão microgeradores rede distribuiçãoLuiz Otávio PachecoAinda não há avaliações
- Formulário de Cadastro de Unidades No Sistema de Compensação 1Documento4 páginasFormulário de Cadastro de Unidades No Sistema de Compensação 1Luiz Otávio PachecoAinda não há avaliações
- Empreendorismo SocialDocumento18 páginasEmpreendorismo SocialLuiz Otávio Pacheco100% (1)
- 118160-Equações Diferenciais de Primeira Ordem Lineares (6 Lista) .Documento3 páginas118160-Equações Diferenciais de Primeira Ordem Lineares (6 Lista) .Luiz Otávio PachecoAinda não há avaliações
- Datasheet Micro Inversor Hoymiles HI1500 CompressedDocumento3 páginasDatasheet Micro Inversor Hoymiles HI1500 CompressedLuiz Otávio PachecoAinda não há avaliações
- Sistemas de Controle DiscretoDocumento2 páginasSistemas de Controle DiscretoLuiz Otávio PachecoAinda não há avaliações
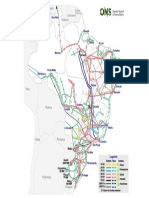
- Mapa da Venezuela e países vizinhosDocumento1 páginaMapa da Venezuela e países vizinhosLuiz Otávio PachecoAinda não há avaliações
- EmpreendedorismoDocumento15 páginasEmpreendedorismosandrolafaiete50% (2)
- CLAMPER Front Box 25A 12 ME GENYXDocumento2 páginasCLAMPER Front Box 25A 12 ME GENYXLuiz Otávio PachecoAinda não há avaliações
- Lista de Exercícios 1Documento1 páginaLista de Exercícios 1Luiz Otávio PachecoAinda não há avaliações
- Prova Institucional 1Documento2 páginasProva Institucional 1Luiz Otávio PachecoAinda não há avaliações
- NBR 13929Documento26 páginasNBR 13929FelipeFalconiAinda não há avaliações
- TCC Andrey 2023Documento28 páginasTCC Andrey 2023luciopatricioAinda não há avaliações
- Inventário de Máquinas e Equipamentos CofercanDocumento108 páginasInventário de Máquinas e Equipamentos CofercanWillians MVAinda não há avaliações
- PUCMG Hydraulic Circuit Design ExercisesDocumento17 páginasPUCMG Hydraulic Circuit Design ExercisesJoao LucasAinda não há avaliações