Você também pode gostar
- Solução Da Métrica de SchwarzschildDocumento17 páginasSolução Da Métrica de SchwarzschildLetícia MaranhãoAinda não há avaliações
- 1 Lista de ExercíciosDocumento11 páginas1 Lista de ExercíciosFelipeBandeiraAinda não há avaliações
- Atividade DiscursivaDocumento2 páginasAtividade DiscursivaGeisimarAinda não há avaliações
- GeodifDocumento4 páginasGeodifGustavo Ignácio Duarte -profgigduarte-Ainda não há avaliações
- Modelo Ramsey Cass Koopmans Macro IVDocumento10 páginasModelo Ramsey Cass Koopmans Macro IVraphael guimaraesAinda não há avaliações
- Prova p2 Gab Calc1 2009 1 Eng PDFDocumento3 páginasProva p2 Gab Calc1 2009 1 Eng PDFAna FigueiredoAinda não há avaliações
- Cap 5Documento27 páginasCap 5almeidaciscoAinda não há avaliações
- Lista 1Documento14 páginasLista 1leafursanAinda não há avaliações
- Listão (3 Unidade) PDFDocumento12 páginasListão (3 Unidade) PDFYasmin TelesAinda não há avaliações
- Diapos Aula 11Documento20 páginasDiapos Aula 11HENRIQUE GAMESAinda não há avaliações
- Ebook Unidade 4Documento38 páginasEbook Unidade 4Murillo GumieroAinda não há avaliações
- 3 - Aplicacoes Das Equacoes de Euler-LagrangeDocumento6 páginas3 - Aplicacoes Das Equacoes de Euler-LagrangeCarlos augusto LeaoAinda não há avaliações
- ALista19 - Integracao Por PartesDocumento2 páginasALista19 - Integracao Por Partesana luisaAinda não há avaliações
- Lista 1Documento14 páginasLista 1joaoAinda não há avaliações
- Lista 2 - Mecânica Clássica 1 - Resolvida - Raphael Gomes SousaDocumento3 páginasLista 2 - Mecânica Clássica 1 - Resolvida - Raphael Gomes SousaFilipe MenezesAinda não há avaliações
- ExameNormal CorrecçãoDocumento7 páginasExameNormal CorrecçãoAbrão AntónioAinda não há avaliações
- PlanadorDocumento75 páginasPlanadorDavi AlexandreAinda não há avaliações
- Solucionário (Incompleto) - Nivaldo Lemos - Mecânica Clássica 1Documento11 páginasSolucionário (Incompleto) - Nivaldo Lemos - Mecânica Clássica 1Filipe MenezesAinda não há avaliações
- DSL Aula 4Documento29 páginasDSL Aula 4Mariana MoreiraAinda não há avaliações
- Aula7 KrigDocumento17 páginasAula7 KrigManuel Castro RibeiroAinda não há avaliações
- ALista20 - Integrais TrigonometricasDocumento2 páginasALista20 - Integrais Trigonometricasana luisaAinda não há avaliações
- Lista 1Documento8 páginasLista 1Amorine Fernanda Matos de MeloAinda não há avaliações
- Seção 1.4-Calculo 3Documento40 páginasSeção 1.4-Calculo 3ADRIANOAinda não há avaliações
- Relatório de Variação de Massa Específica - Paulo RodrigoDocumento5 páginasRelatório de Variação de Massa Específica - Paulo RodrigoKleyphide Pereira da SilvaAinda não há avaliações
- Seção 14.3Documento2 páginasSeção 14.3Angelina LopesAinda não há avaliações
- Suplemento IIDocumento4 páginasSuplemento IIKalil SoaresAinda não há avaliações
- Em RLCDocumento2 páginasEm RLCCaio LirioAinda não há avaliações
- Lista 8 Calculo1Documento3 páginasLista 8 Calculo1Gisele SejanesAinda não há avaliações
- Resolução de Uma Questão Sobre Transferência de Calor A Partir de Uma Superfície AletadaDocumento9 páginasResolução de Uma Questão Sobre Transferência de Calor A Partir de Uma Superfície AletadabrumaiafotosAinda não há avaliações
- DCC008 Lista 1Documento5 páginasDCC008 Lista 1Yuri SouzaAinda não há avaliações
- Apostila MEF (Método Dos Elementos Finitos) Utilizando ANSYS - Prof. Pedro Manuel (CEFET-RJ) PDFDocumento65 páginasApostila MEF (Método Dos Elementos Finitos) Utilizando ANSYS - Prof. Pedro Manuel (CEFET-RJ) PDFnorman1968Ainda não há avaliações
- Lista 1Documento4 páginasLista 1Luiz R. LimaAinda não há avaliações
- Lista EDODocumento5 páginasLista EDOthiagoogaihtAinda não há avaliações
- L1-Mat122 2023Documento2 páginasL1-Mat122 2023Guilherme BittencourtAinda não há avaliações
- Aula 4 - Cálculo Com Curvas ParametrizadasDocumento20 páginasAula 4 - Cálculo Com Curvas ParametrizadasThiago SilvaAinda não há avaliações
- 2003 01 Probest t1 GabaritoDocumento6 páginas2003 01 Probest t1 Gabaritoapi-3858103Ainda não há avaliações
- Cálculo III P1 - 2021 - 2Documento3 páginasCálculo III P1 - 2021 - 2Camila TeixeiraAinda não há avaliações
- Harmonicos EsfericosDocumento7 páginasHarmonicos EsfericosMatheus GuimaraesAinda não há avaliações
- Pos Comp 2014Documento23 páginasPos Comp 2014E.L. DiasAinda não há avaliações
- Lista 2 IntegraisDocumento3 páginasLista 2 Integraispettinho gamesAinda não há avaliações
- EEL 7052 - Prova 1Documento4 páginasEEL 7052 - Prova 1Gabriel GoulartAinda não há avaliações
- Artigo Solução Do Problema Do Disco SBMDocumento10 páginasArtigo Solução Do Problema Do Disco SBMcleuberAinda não há avaliações
- Integ CurvilineaDocumento7 páginasInteg CurvilineaLeonardo Maximino BernardoAinda não há avaliações
- CM042 Listas PDFDocumento33 páginasCM042 Listas PDFsergio paulino bandeiraAinda não há avaliações
- Calculo 3Documento16 páginasCalculo 3Pedro AmaralAinda não há avaliações
- Analogia Entre Sinais e VetoresDocumento21 páginasAnalogia Entre Sinais e VetoresVirgilio Jose Cambraia LopesAinda não há avaliações
- EXECAULA20191106Documento3 páginasEXECAULA20191106LorenaAinda não há avaliações
- Introducao Ao Controle DigitalDocumento29 páginasIntroducao Ao Controle DigitaltecnicowagnerAinda não há avaliações
- Teste ISUTC Guião VB-1Documento5 páginasTeste ISUTC Guião VB-1Sami NzéAinda não há avaliações
- Apontamentos-8 - Integral DuplaDocumento9 páginasApontamentos-8 - Integral DuplaJeremias FernandoAinda não há avaliações
- Derivadas: 1.1. Algumas Fun C OesDocumento18 páginasDerivadas: 1.1. Algumas Fun C OesMaria SilvaAinda não há avaliações
- Af2 13er CorDocumento3 páginasAf2 13er CorContaAinda não há avaliações
- Lista6 Movimento 2D 3D RESOLUÇÃODocumento3 páginasLista6 Movimento 2D 3D RESOLUÇÃOPedro Sousa CastroAinda não há avaliações
- 11ano T5 ResolucaoDocumento7 páginas11ano T5 ResolucaoHugo SantosAinda não há avaliações
- Contração de Banach e Teorema de PicardDocumento19 páginasContração de Banach e Teorema de PicardEduardo Teixeira de OliveiraAinda não há avaliações
- Lista de Cálculo VetorialDocumento4 páginasLista de Cálculo VetorialAnna Jullia DiasAinda não há avaliações
- Formulario Identidades TrigonometricasDocumento2 páginasFormulario Identidades TrigonometricasDanilo CuichanAinda não há avaliações
- Unidade01 Pendulo Carro MIMODocumento4 páginasUnidade01 Pendulo Carro MIMOAlcides SabainiAinda não há avaliações
- Antenna Theory Problem Solutions (In Portuguese)Documento9 páginasAntenna Theory Problem Solutions (In Portuguese)Luiz VottoAinda não há avaliações
- Trigonometria 2023Documento85 páginasTrigonometria 2023Luiz MattosAinda não há avaliações
- A Sabedoria Da Antiga Cosmologia - Wolfgang SmithDocumento340 páginasA Sabedoria Da Antiga Cosmologia - Wolfgang SmithJonatas Gomes100% (1)
- Baricentro JuanLopez EbookDocumento73 páginasBaricentro JuanLopez EbookLuiz MattosAinda não há avaliações
- Eduardo Wagner - Construções GeométricaDocumento123 páginasEduardo Wagner - Construções GeométricaLuiz Mattos100% (1)
- A Esquerda No Brasil 1922 1964Documento18 páginasA Esquerda No Brasil 1922 1964Gerson de SouzaAinda não há avaliações
- A Sabedoria Da Antiga Cosmologia - Wolfgang SmithDocumento340 páginasA Sabedoria Da Antiga Cosmologia - Wolfgang SmithJonatas Gomes100% (1)
- A Organizacao Juridica Da Economia DuranDocumento54 páginasA Organizacao Juridica Da Economia DuranLuiz MattosAinda não há avaliações
- Prova Tentativa 3Documento5 páginasProva Tentativa 3Hallen Lopes Aires100% (1)
- Teste Do Capítulo 4 - Revisão Da TentativaDocumento7 páginasTeste Do Capítulo 4 - Revisão Da TentativaFernando Totoli Ferreira100% (1)
- Artigo ComplexidadeDocumento125 páginasArtigo ComplexidadeHelio FilhoAinda não há avaliações
- Cap 2 - Resolucao de Problemas Por Meio de BuscasDocumento20 páginasCap 2 - Resolucao de Problemas Por Meio de BuscascarlosAinda não há avaliações
- Glossário MACS 11Documento3 páginasGlossário MACS 11RúbenAinda não há avaliações
- Método de Eliminação GaussianaDocumento5 páginasMétodo de Eliminação GaussianaEvelyn Micheli KleinAinda não há avaliações
- Aula de Revisão IiDocumento29 páginasAula de Revisão IiJessica Cristina PereiraAinda não há avaliações
- Conceitos E: Aprendizado ProfundoDocumento161 páginasConceitos E: Aprendizado Profundojairo silveiraAinda não há avaliações
- Aula 5 - EconometriaDocumento27 páginasAula 5 - EconometriaAlejandro Pulgarin CueroAinda não há avaliações
- Lista 4 Máquinas Térmicas e A Segunda Lei Da TermodinâmicaDocumento13 páginasLista 4 Máquinas Térmicas e A Segunda Lei Da Termodinâmicasatoru4nishidaAinda não há avaliações
- Lista de ExercíciosDocumento2 páginasLista de ExercíciosmileknzAinda não há avaliações
- Disciplinas PPG MATDocumento4 páginasDisciplinas PPG MATMauricio Oliverira do Nascimento nascimentoAinda não há avaliações
- Implementação de Otimização Colônia de Formigas PDFDocumento14 páginasImplementação de Otimização Colônia de Formigas PDFSenhor MAinda não há avaliações
- Apostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Documento145 páginasApostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Allan MoreiraAinda não há avaliações
- Lista-Transformação LinearDocumento2 páginasLista-Transformação LinearLuísAinda não há avaliações
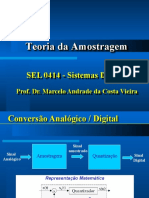
- Aula 20 - Teoria Da Amostragem PDFDocumento15 páginasAula 20 - Teoria Da Amostragem PDFMarcos NobreAinda não há avaliações
- Metodo Simplex Simples e CompletoDocumento8 páginasMetodo Simplex Simples e CompletoTomas MarceloAinda não há avaliações
- Lista15 2017 1 Cauchy EulerDocumento2 páginasLista15 2017 1 Cauchy EulerHeitor LucenaAinda não há avaliações
- Codificação Da Fonte e de CanalDocumento26 páginasCodificação Da Fonte e de CanalHenrique BeloAinda não há avaliações
- Lista 2 Indução MatematicaDocumento2 páginasLista 2 Indução MatematicaIgor MartinsAinda não há avaliações
- Lista 1 - DEMA0312 - ESTATISTICA APLICADA 2022.1Documento2 páginasLista 1 - DEMA0312 - ESTATISTICA APLICADA 2022.1Melo JoseAinda não há avaliações
- Linguagens Formais, Autômatos e Compiladores - Aula 1Documento66 páginasLinguagens Formais, Autômatos e Compiladores - Aula 1Pedro Lucas Teixeira DiasAinda não há avaliações
- Equacoes 1ograu Ficha1Documento4 páginasEquacoes 1ograu Ficha1Carla SantosAinda não há avaliações
- Ed - Grafosgrafos EstruDocumento6 páginasEd - Grafosgrafos EstruJoãoNetoAinda não há avaliações
- Programação: Instituto Politécnico Do Cávado E Do Ave Utesp: Robótica Colaborativa E Inteligência Industrial (Rcii) PLDocumento8 páginasProgramação: Instituto Politécnico Do Cávado E Do Ave Utesp: Robótica Colaborativa E Inteligência Industrial (Rcii) PLpereiramcfAinda não há avaliações