Você também pode gostar
- Af2 12er CorDocumento3 páginasAf2 12er CorContaAinda não há avaliações
- Af2 11er CorDocumento4 páginasAf2 11er CorContaAinda não há avaliações
- Af2 13en CorDocumento3 páginasAf2 13en CorContaAinda não há avaliações
- Af2 12en CorDocumento3 páginasAf2 12en CorContaAinda não há avaliações
- Af2 11en CorDocumento3 páginasAf2 11en CorContaAinda não há avaliações
- Af2 15er CorDocumento4 páginasAf2 15er CorContaAinda não há avaliações
- Provas Cdi3Documento21 páginasProvas Cdi3Maria SebastiãoAinda não há avaliações
- Af2 16en CorDocumento3 páginasAf2 16en CorContaAinda não há avaliações
- Cálculo de integrais e áreas de regiões planasDocumento3 páginasCálculo de integrais e áreas de regiões planasAna FigueiredoAinda não há avaliações
- CDI 2 1MAP45 18H VA 22 23 ResDocumento3 páginasCDI 2 1MAP45 18H VA 22 23 ResAndre DuarteAinda não há avaliações
- Cálculo Diferencial e Integral IIDocumento4 páginasCálculo Diferencial e Integral IIVasco MoraisAinda não há avaliações
- Af2 15en CorDocumento4 páginasAf2 15en CorContaAinda não há avaliações
- Gab. - Calc1-P1Documento3 páginasGab. - Calc1-P1JoséAinda não há avaliações
- Provas AcedDocumento69 páginasProvas AcedMaria SebastiãoAinda não há avaliações
- Cálculo 3: integrais de campo vetorial e curvas paramétricasDocumento3 páginasCálculo 3: integrais de campo vetorial e curvas paramétricasCamila TeixeiraAinda não há avaliações
- Séries de Taylor e Equações DiferenciaisDocumento3 páginasSéries de Taylor e Equações DiferenciaisMônica TeixeiraAinda não há avaliações
- Mecânica Clássica 1 - Primeira avaliação com respostas comentadasDocumento5 páginasMecânica Clássica 1 - Primeira avaliação com respostas comentadasMoon LilAinda não há avaliações
- Cálculo Diferencial e Integral II - Teste 1Documento3 páginasCálculo Diferencial e Integral II - Teste 1Vasco MoraisAinda não há avaliações
- P2 Gabarito 2019 1.Documento5 páginasP2 Gabarito 2019 1.Ana FigueiredoAinda não há avaliações
- Nome: Matr Icula: Polo: Data:: Aten C Ao!Documento3 páginasNome: Matr Icula: Polo: Data:: Aten C Ao!Glaucia PiresAinda não há avaliações
- Equações Diferenciais Lineares de 1a ordemDocumento15 páginasEquações Diferenciais Lineares de 1a ordemDiogo SilvaAinda não há avaliações
- Lista 1Documento14 páginasLista 1leafursanAinda não há avaliações
- Departamento de Matemática: Licenciaturas em Economia, Finanças e Gestão - Matemática IIDocumento4 páginasDepartamento de Matemática: Licenciaturas em Economia, Finanças e Gestão - Matemática IIPessoa LindaAinda não há avaliações
- Movimento 2D e 3D descrito por funções trigonométricasDocumento3 páginasMovimento 2D e 3D descrito por funções trigonométricasPedro Sousa CastroAinda não há avaliações
- Equações Diferenciais em Física e BiologiaDocumento2 páginasEquações Diferenciais em Física e BiologiaeduardaAinda não há avaliações
- Lista1 IntegralDocumento11 páginasLista1 IntegralEdmo KristoPodeAinda não há avaliações
- Operações conjuntos números aproximadosDocumento27 páginasOperações conjuntos números aproximadosMustaquimAinda não há avaliações
- Eddp 13t21corDocumento5 páginasEddp 13t21corPuto SantanaAinda não há avaliações
- CVT Lista2Documento3 páginasCVT Lista2Lucas PereiraAinda não há avaliações
- Exercícios resolvidos de mecânica analíticaDocumento11 páginasExercícios resolvidos de mecânica analíticaFilipe MenezesAinda não há avaliações
- Lista de Aplicação - Semana 14 - SoluçãoDocumento5 páginasLista de Aplicação - Semana 14 - SoluçãoBárbara MourãoAinda não há avaliações
- Lista 1 - Calc2_2020_1Documento4 páginasLista 1 - Calc2_2020_1Higor JhonsonAinda não há avaliações
- Legendre functions and orthogonal polynomialsDocumento8 páginasLegendre functions and orthogonal polynomialsAndressa FernandesAinda não há avaliações
- Matemática para Economia e Gestão - Exame de recursoDocumento4 páginasMatemática para Economia e Gestão - Exame de recursoinesAinda não há avaliações
- Condução de Calor em Barra: Método da Separação de VariáveisDocumento7 páginasCondução de Calor em Barra: Método da Separação de VariáveisMaycon RochaAinda não há avaliações
- Lista 1 - Calc2 Eng - 2020-01Documento4 páginasLista 1 - Calc2 Eng - 2020-01fel198337Ainda não há avaliações
- Ficha2 2324s1 PropDocumento3 páginasFicha2 2324s1 PropEmília Morgado SantosAinda não há avaliações
- Af2 07t21Documento2 páginasAf2 07t21SantosAinda não há avaliações
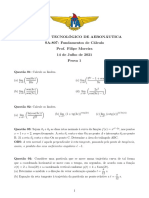
- Questões de Limites e DerivadasDocumento3 páginasQuestões de Limites e DerivadasFilipe MoreiraAinda não há avaliações
- Dicas e respostas da lista de exercícios de EDO IIDocumento8 páginasDicas e respostas da lista de exercícios de EDO IIDitmar Sayritupac VenturaAinda não há avaliações
- Cálculo II - Provas AntigasDocumento46 páginasCálculo II - Provas AntigasMayara FigueiredoAinda não há avaliações
- Lista 2.10Documento2 páginasLista 2.10MarcosAinda não há avaliações
- Ficha 8 - Mudança de Variáveis de Integração, Regra de LeibnizDocumento15 páginasFicha 8 - Mudança de Variáveis de Integração, Regra de LeibnizGonçalo SantoAinda não há avaliações
- Lista No. 3 (MAT021)Documento6 páginasLista No. 3 (MAT021)nago gerardoAinda não há avaliações
- Prova 2 2016 2 Sexta PAUTADocumento2 páginasProva 2 2016 2 Sexta PAUTACarlos EduardoAinda não há avaliações
- Avaliacao2!29!06 ResDocumento4 páginasAvaliacao2!29!06 ResEmerson SousaAinda não há avaliações
- Analise Funcional Exercicios FeitosDocumento11 páginasAnalise Funcional Exercicios FeitosVivaldo BilaAinda não há avaliações
- Sub ResolvidaDocumento7 páginasSub ResolvidaJULIANE CAMILE DE JESUS NOGUEIRA AVILAAinda não há avaliações
- Física Matemática - Exercícios de LaplaceDocumento1 páginaFísica Matemática - Exercícios de LaplaceErica Aparecida SucupiraAinda não há avaliações
- Lista 02 EdDocumento7 páginasLista 02 EdLauritachavarriaAinda não há avaliações
- Ficha1 2122Documento14 páginasFicha1 2122Emília Morgado SantosAinda não há avaliações
- Resolucao P2 FUVDocumento5 páginasResolucao P2 FUVguisouza13715Ainda não há avaliações
- Integrais curvilíneas da primeira e segunda espéciesDocumento8 páginasIntegrais curvilíneas da primeira e segunda espéciesPekirAinda não há avaliações
- Equações Diferenciais Parciais: curvas características e problemas de CauchyDocumento31 páginasEquações Diferenciais Parciais: curvas características e problemas de CauchyHENRIQUE GAMESAinda não há avaliações
- Ficha de Exercicios CNDocumento28 páginasFicha de Exercicios CNAarao MachaiaAinda não há avaliações
- Suplemento IIDocumento4 páginasSuplemento IIKalil SoaresAinda não há avaliações
- Prova 3 B FabioDocumento7 páginasProva 3 B FabioJuliano HerzogAinda não há avaliações
- Listas de Exercicios 3Documento3 páginasListas de Exercicios 3sylviocoelhoAinda não há avaliações
- Lista 08 B - BomDocumento17 páginasLista 08 B - BomErivelton VitorAinda não há avaliações
- Aula 2 - Limites - Alunos PDFDocumento46 páginasAula 2 - Limites - Alunos PDFErcidio ManhangoAinda não há avaliações
- 8º Ano Matemática 1Documento2 páginas8º Ano Matemática 1CARLI JAQUELINE TAVARES DA SILVAAinda não há avaliações
- Teste Z para Comparação de Duas Proporções PDFDocumento6 páginasTeste Z para Comparação de Duas Proporções PDFFabricio AlmeidaAinda não há avaliações
- Ficha de Revisão de PolígonosDocumento5 páginasFicha de Revisão de PolígonosThayseAinda não há avaliações
- Lógica - Outras Técnicas de ProvaDocumento4 páginasLógica - Outras Técnicas de ProvaJéssica NaianaAinda não há avaliações
- Decodificadores e Codificadores: circuitos e aplicaçõesDocumento55 páginasDecodificadores e Codificadores: circuitos e aplicaçõesKleber AbreuAinda não há avaliações
- Robótica no Matlab: Criação e Simulação de ManipuladoresDocumento34 páginasRobótica no Matlab: Criação e Simulação de ManipuladoresJoão Gabriel Castilho HaineAinda não há avaliações
- Cálculo de vazão para válvulas de agulhaDocumento3 páginasCálculo de vazão para válvulas de agulhaRenatobolAinda não há avaliações
- Eureka! 2 - FichasDocumento123 páginasEureka! 2 - FichasCarla Y EduAinda não há avaliações
- Etnomatematica Alto Do Rio NegroDocumento10 páginasEtnomatematica Alto Do Rio NegroAllisson VieiraAinda não há avaliações
- Avaliação de Números ComplexosDocumento2 páginasAvaliação de Números ComplexosCarlos Eduardo OliveiraAinda não há avaliações
- Movimento de esfera sobre plano inclinadoDocumento12 páginasMovimento de esfera sobre plano inclinadoLeicam MacielAinda não há avaliações
- Organização e departamentalização para atingir objetivosDocumento7 páginasOrganização e departamentalização para atingir objetivosMariana CarvalhoAinda não há avaliações
- Origens da matemática pré-históricaDocumento165 páginasOrigens da matemática pré-históricadaniel pascoalAinda não há avaliações
- Métodos de cubagem de toras de madeiraDocumento6 páginasMétodos de cubagem de toras de madeiraNOIVODALAGOAAinda não há avaliações
- Termoquímica UFBADocumento16 páginasTermoquímica UFBAThais Luz SouzaAinda não há avaliações
- Lista Avaliativa Ab1Documento2 páginasLista Avaliativa Ab1Nathália LoizyAinda não há avaliações
- Poliedros Regulares e IrregularesDocumento3 páginasPoliedros Regulares e IrregularesLukasVictor100% (1)
- AM conceitos introduçãoDocumento18 páginasAM conceitos introduçãoMarcos Pereira Pinto FIlhoAinda não há avaliações
- Criação Funções PFCGDocumento37 páginasCriação Funções PFCGLuiz O. GiordaniAinda não há avaliações
- Treinamento ComplexidadeDocumento44 páginasTreinamento ComplexidadeMarcus LimaAinda não há avaliações
- Apostila de PCI-I FísicaDocumento30 páginasApostila de PCI-I FísicaVitor ChemelloAinda não há avaliações
- Estatística Aplicada à EducaçãoDocumento63 páginasEstatística Aplicada à EducaçãoRonald MoraesAinda não há avaliações
- Pcscale - DLL Manual FilizolaDocumento20 páginasPcscale - DLL Manual FilizolaRaphael912023Ainda não há avaliações
- Termodinâmica escalas temperaturaDocumento84 páginasTermodinâmica escalas temperaturaLeonardo Gomes100% (1)
- Aula 01 - Trigonometria I - AFA 2024Documento231 páginasAula 01 - Trigonometria I - AFA 2024João Gabriel Ferreira Calixto100% (1)
- Manual Yamaha Psr-350Documento89 páginasManual Yamaha Psr-350sophieteosofyAinda não há avaliações
- D1 (3 Série - Mat.) - Blog Do Prof. RivaildoDocumento3 páginasD1 (3 Série - Mat.) - Blog Do Prof. RivaildoJuliano AlmeidaAinda não há avaliações
- Gruas PDFDocumento102 páginasGruas PDFWanessa Macedo LopesAinda não há avaliações
- Exercícios de numeraisDocumento3 páginasExercícios de numeraisStanismar BritoAinda não há avaliações