Você também pode gostar
- Abnt NBR 5356 1 2007 PDFDocumento103 páginasAbnt NBR 5356 1 2007 PDFAdrian Rodrigues67% (3)
- Eoas e PeateDocumento28 páginasEoas e PeateAndréa Garcia100% (1)
- Ondas eletromagnéticas e suas propriedadesDocumento4 páginasOndas eletromagnéticas e suas propriedadesPatrik Lanes100% (2)
- Exercícios de trato vocal semiocluído: revisão da literatura sobre seus efeitosDocumento11 páginasExercícios de trato vocal semiocluído: revisão da literatura sobre seus efeitosAndrePLima100% (1)
- Análise acústica da vozDocumento50 páginasAnálise acústica da vozTato OliveiraAinda não há avaliações
- Toshiba MS9050 MS9090Documento35 páginasToshiba MS9050 MS9090sugeda100% (1)
- Funções periódicasDocumento5 páginasFunções periódicasFilipe Silva100% (1)
- Onda senoidal, triangular e quadradaDocumento3 páginasOnda senoidal, triangular e quadradaPablo LeonardelliAinda não há avaliações
- Cálculo de Valor EficazDocumento5 páginasCálculo de Valor EficazJunior Alves ZancanaroAinda não há avaliações
- Cap 3 016 Formas de OndaDocumento13 páginasCap 3 016 Formas de OndaMariana Campos GameiroAinda não há avaliações
- Medição de valores eficazes em circuitos CA, CC e CA retificadaDocumento9 páginasMedição de valores eficazes em circuitos CA, CC e CA retificadaPaulo CardilloAinda não há avaliações
- Capítulo 6 - Análise de Fourier - Ckt61Documento25 páginasCapítulo 6 - Análise de Fourier - Ckt61AntonioAinda não há avaliações
- Circuitos Elétricos: Respostas CompletasDocumento8 páginasCircuitos Elétricos: Respostas CompletasCarllos LimmaAinda não há avaliações
- Laboratorio1 3Q2017Documento11 páginasLaboratorio1 3Q2017Vitor MiguelAinda não há avaliações
- Aula2 TecomDocumento26 páginasAula2 Tecomdksodaskk100% (1)
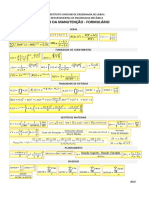
- Gestão da manutenção e fiabilidade de sistemas no ISELDocumento1 páginaGestão da manutenção e fiabilidade de sistemas no ISELJoão Miguel ViegasAinda não há avaliações
- ESTA002-17 Laboratorio 1Documento11 páginasESTA002-17 Laboratorio 1IAMAinda não há avaliações
- Segunda lista de exercícios de Cálculo II com curvas planas e espaçoDocumento2 páginasSegunda lista de exercícios de Cálculo II com curvas planas e espaçokdepederAinda não há avaliações
- Prática 06Documento15 páginasPrática 06Thiago DuarteAinda não há avaliações
- Tensor TensãoDocumento8 páginasTensor TensãoAntonio NetoAinda não há avaliações
- Introducao SEE1bDocumento25 páginasIntroducao SEE1bPaulo H TavaresAinda não há avaliações
- Grand SinusDocumento10 páginasGrand SinusGabriel AlvesAinda não há avaliações
- Medição e comparação de formas de onda elétricasDocumento13 páginasMedição e comparação de formas de onda elétricasSamuel AquinoAinda não há avaliações
- Potência em circuitos elétricosDocumento11 páginasPotência em circuitos elétricosMauricioAinda não há avaliações
- Aula 02 - CIRCUITOS DE CORRENTE ALTERNADADocumento7 páginasAula 02 - CIRCUITOS DE CORRENTE ALTERNADADanilo Afonso PedroAinda não há avaliações
- Transformada de Fourier e séries de Fourier em sinais periódicos e não periódicosDocumento3 páginasTransformada de Fourier e séries de Fourier em sinais periódicos e não periódicossuAinda não há avaliações
- Exercícios Resolvido EnergiaDocumento11 páginasExercícios Resolvido Energiasamuel nicolauAinda não há avaliações
- Cálculo de valores médio e rms em circuitos de eletrônica de potênciaDocumento22 páginasCálculo de valores médio e rms em circuitos de eletrônica de potênciaPablo CarvalhoAinda não há avaliações
- Aula 10 1Documento21 páginasAula 10 1Maria Carolina CostaAinda não há avaliações
- Transformações lineares e subespaçosDocumento2 páginasTransformações lineares e subespaçosMatheus RezendeAinda não há avaliações
- Dicas Lista 2Documento2 páginasDicas Lista 2weslly darlanAinda não há avaliações
- EA614 - Análise de Sinais: Série de Fourier e FiltrosDocumento2 páginasEA614 - Análise de Sinais: Série de Fourier e FiltrosJoao Das NevesAinda não há avaliações
- Resolução Prova1 AntigaDocumento5 páginasResolução Prova1 AntigaDaniel SharkAinda não há avaliações
- ED3 ASDL AnaliseDeFourier r2Documento6 páginasED3 ASDL AnaliseDeFourier r2Arthur Vieira de Assis MoreiraAinda não há avaliações
- Dca0110 Modelagem List-ExercDocumento14 páginasDca0110 Modelagem List-ExercBio HueAinda não há avaliações
- Transformação linear entre espaços vetoriaisDocumento6 páginasTransformação linear entre espaços vetoriaisLeo ValenteAinda não há avaliações
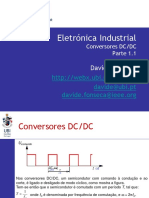
- Cap. 3.1.1 - Conversor DC-DC Buck-1ßQDocumento43 páginasCap. 3.1.1 - Conversor DC-DC Buck-1ßQPedro BatistaAinda não há avaliações
- Análise de Fourier e Séries de FourierDocumento95 páginasAnálise de Fourier e Séries de FourierRui CarvalhoAinda não há avaliações
- Relatório - Exp7 - Circuito RC - Fenômenos Eletromagnéticos - Trim2.1Documento13 páginasRelatório - Exp7 - Circuito RC - Fenômenos Eletromagnéticos - Trim2.1Fernando Henrique G. ZucatelliAinda não há avaliações
- Fisica 2Documento4 páginasFisica 2Amando AdoracãoAinda não há avaliações
- Cálculo Diferencial e Integral III - Conteúdo ProgramáticoDocumento41 páginasCálculo Diferencial e Integral III - Conteúdo ProgramáticoIran Rodrigues de Oliveira RodriguesAinda não há avaliações
- TERMISTORDocumento8 páginasTERMISTORluciaAinda não há avaliações
- Lista 4 Calculo 3Documento1 páginaLista 4 Calculo 3Erick IbernonAinda não há avaliações
- Parâmetros e diagramas de radiação de antenasDocumento15 páginasParâmetros e diagramas de radiação de antenaschristarnovskyAinda não há avaliações
- Aula 02 - Revisão e DiodosDocumento27 páginasAula 02 - Revisão e DiodosMOISES SAMPAIO DA SILVAAinda não há avaliações
- notas_1Documento4 páginasnotas_1rafaelpdc22Ainda não há avaliações
- RODA de MAXWELL Guia - Ana Amaral 2018Documento11 páginasRODA de MAXWELL Guia - Ana Amaral 2018Josiel Nasc'mentoAinda não há avaliações
- Aula 1 Et2Documento21 páginasAula 1 Et2SergiooAinda não há avaliações
- Lista2 MAT3458 2021Documento16 páginasLista2 MAT3458 2021Henrique CoelhoAinda não há avaliações
- Instrumentos de medição de sinais alternadosDocumento9 páginasInstrumentos de medição de sinais alternadosGabriel RamosAinda não há avaliações
- FT Aula 06 2022 PDFDocumento52 páginasFT Aula 06 2022 PDFFAUSTOAinda não há avaliações
- Aula 3 (Teorias Atômicas)Documento81 páginasAula 3 (Teorias Atômicas)Arleson ProtázioAinda não há avaliações
- Elecap1 ADocumento4 páginasElecap1 AWandolly Baluz MacielAinda não há avaliações
- 3 Retificadores Monofásicos Não Controlados Parte 1Documento19 páginas3 Retificadores Monofásicos Não Controlados Parte 1Abel HenriqueAinda não há avaliações
- Lista TriedroDocumento4 páginasLista TriedroLívia PinheiroAinda não há avaliações
- Cálculo vetorial: vetores normal e binormal de uma curvaDocumento13 páginasCálculo vetorial: vetores normal e binormal de uma curvaBruno CarvalhoAinda não há avaliações
- Vetores Normal e Binormal PDFDocumento13 páginasVetores Normal e Binormal PDFBruno CarvalhoAinda não há avaliações
- Vetores Normal e Binormal PDFDocumento13 páginasVetores Normal e Binormal PDFBruno CarvalhoAinda não há avaliações
- Capitulo 12Documento85 páginasCapitulo 12Wendell LimaAinda não há avaliações
- Frensel K, Delgado J - Notas de Geometria Diferencial Cap1Documento37 páginasFrensel K, Delgado J - Notas de Geometria Diferencial Cap1Edson GagliardiAinda não há avaliações
- Curvas PlanasDocumento452 páginasCurvas PlanasHamilton C RodriguesAinda não há avaliações
- Lista9_AlgebraLinear_AutosValoresDocumento1 páginaLista9_AlgebraLinear_AutosValoresMarcelo BragaAinda não há avaliações
- Olimpíadas de Física Prova TeóricaDocumento5 páginasOlimpíadas de Física Prova TeóricaRafael MadeiraAinda não há avaliações
- CLARO(24.012.12)Documento1 páginaCLARO(24.012.12)grasia77Ainda não há avaliações
- CLARO(24.012.12)Documento1 páginaCLARO(24.012.12)grasia77Ainda não há avaliações
- Relogio CITZEN Sailhawk C660Documento67 páginasRelogio CITZEN Sailhawk C660grasia77Ainda não há avaliações
- etiqueta_de_leader_note_criado_em_26_03_24_as_LwOKq1T3e3H121ybz4AH_minha_pagina_inicialDocumento1 páginaetiqueta_de_leader_note_criado_em_26_03_24_as_LwOKq1T3e3H121ybz4AH_minha_pagina_inicialgrasia77Ainda não há avaliações
- 001 22 GT Anexo VIII Minuta Contrato de Compra e Venda de EnergiaDocumento42 páginas001 22 GT Anexo VIII Minuta Contrato de Compra e Venda de Energiagrasia77Ainda não há avaliações
- caneta_Geison(14.02.12)Documento1 páginacaneta_Geison(14.02.12)grasia77Ainda não há avaliações
- Compro VanteDocumento1 páginaCompro Vantegrasia77Ainda não há avaliações
- comprovante (2)Documento1 páginacomprovante (2)grasia77Ainda não há avaliações
- Estudo DAS Perdas Magnéticas Interlaminares EM Máquinas ElétricasDocumento122 páginasEstudo DAS Perdas Magnéticas Interlaminares EM Máquinas ElétricasBig PimpingAinda não há avaliações
- Construção e Caracterização de Um Transformador de 562,5 VA Com Núcleo de Ferro AmorfoDocumento95 páginasConstrução e Caracterização de Um Transformador de 562,5 VA Com Núcleo de Ferro Amorfograsia77Ainda não há avaliações
- Metaltex BR8Documento2 páginasMetaltex BR8grasia77Ainda não há avaliações
- Barra de pinos e soquete CI para conexões de até 40 viasDocumento1 páginaBarra de pinos e soquete CI para conexões de até 40 viasgrasia77Ainda não há avaliações
- Diss ADRIANO ALEX DE ALMEIDADocumento111 páginasDiss ADRIANO ALEX DE ALMEIDAMaycon MaranAinda não há avaliações
- Borne Trafo ProautoDocumento2 páginasBorne Trafo Proautograsia77Ainda não há avaliações
- Coralterm-HN Aluminio 180°CDocumento2 páginasCoralterm-HN Aluminio 180°Cgrasia77Ainda não há avaliações
- bspl40kg DatasheetDocumento1 páginabspl40kg Datasheetgrasia77Ainda não há avaliações
- SEPOC S3aDocumento30 páginasSEPOC S3agrasia77Ainda não há avaliações
- Como 05 Juntas&conectoresDocumento46 páginasComo 05 Juntas&conectoresgrasia77Ainda não há avaliações
- Barra de pinos 2,54mm especificaçõesDocumento1 páginaBarra de pinos 2,54mm especificaçõesgrasia77Ainda não há avaliações
- Barra de pinos e soquete CI para conexões de até 40 viasDocumento1 páginaBarra de pinos e soquete CI para conexões de até 40 viasgrasia77Ainda não há avaliações
- Barra de Pinos BPIDocumento1 páginaBarra de Pinos BPIgrasia77Ainda não há avaliações
- 134 JoseOliveiraDocumento171 páginas134 JoseOliveiragrasia77Ainda não há avaliações
- Manual de Engenharia Sistemas Pressurizacao Texto IntegralDocumento78 páginasManual de Engenharia Sistemas Pressurizacao Texto IntegralRicardo SantosAinda não há avaliações
- Mapeamento Do Uso e Cobertura Do Solo Do Município de Caxias Do Sul (RS) Através de Imagens Do Satélite CBERSDocumento5 páginasMapeamento Do Uso e Cobertura Do Solo Do Município de Caxias Do Sul (RS) Através de Imagens Do Satélite CBERSgrasia77Ainda não há avaliações
- Manual de Hidrografia - 7 Pratica HidrograficaDocumento76 páginasManual de Hidrografia - 7 Pratica HidrograficaMagno JuniorAinda não há avaliações
- Sistemas de Transmissão IndustriaisDocumento101 páginasSistemas de Transmissão Industriaisgrasia77Ainda não há avaliações
- Registro de especificações de produção da casaDocumento1 páginaRegistro de especificações de produção da casagrasia77Ainda não há avaliações
- Coordenadas Geográficas Na Estimativa Das Temperaturas Máxima e Média Decendiais Do Ar No Estado Do Rio Grande Do SulDocumento9 páginasCoordenadas Geográficas Na Estimativa Das Temperaturas Máxima e Média Decendiais Do Ar No Estado Do Rio Grande Do Sulgrasia77Ainda não há avaliações
- Portfolio Ciencias Roteiro 4Documento6 páginasPortfolio Ciencias Roteiro 4Yudi YudiAinda não há avaliações
- Fenômenos ondulatórios em óculos 3D e fones de ouvidoDocumento2 páginasFenômenos ondulatórios em óculos 3D e fones de ouvidoHydraAinda não há avaliações
- Ondas estacionárias em fio: freqüência e comprimentoDocumento4 páginasOndas estacionárias em fio: freqüência e comprimentoJosé TiagoAinda não há avaliações
- Trabalhos de CasaDocumento10 páginasTrabalhos de CasaDenny FranciscoAinda não há avaliações
- 09 Exercicio DifracaoDocumento107 páginas09 Exercicio DifracaoRafael Madeira100% (2)
- Estudo Das OndasDocumento8 páginasEstudo Das OndasmgalceuAinda não há avaliações
- Raios UltravioletasDocumento11 páginasRaios UltravioletasMiguel zabaraAinda não há avaliações
- Prova Bimestral de Física - 2° Ano - 4 Etapa - 2022Documento4 páginasProva Bimestral de Física - 2° Ano - 4 Etapa - 2022Ruan PabloAinda não há avaliações
- Análise EspectrométricaDocumento66 páginasAnálise EspectrométricaHansMikuAinda não há avaliações
- Atividade 3 - Vibrações Mecânicas e Acústicas - 51-2024Documento6 páginasAtividade 3 - Vibrações Mecânicas e Acústicas - 51-2024admcavaliniassessoriaAinda não há avaliações
- Lista 1Documento6 páginasLista 1Filipe MirandaAinda não há avaliações
- Testes de M Tlipla EscolhaDocumento204 páginasTestes de M Tlipla EscolhaIran Sousa LimaAinda não há avaliações
- TD de Revisão - 2 Ano - FisicaDocumento4 páginasTD de Revisão - 2 Ano - FisicaGabriel VianaAinda não há avaliações
- Refração Da Luz - 6 QuestõesDocumento6 páginasRefração Da Luz - 6 QuestõesCamila NunesAinda não há avaliações
- Ondas 9 Ano BDocumento9 páginasOndas 9 Ano BDAVI MORAIS MONTEIROAinda não há avaliações
- 8 Ano-2Documento3 páginas8 Ano-2Sofia MoutinhoAinda não há avaliações
- Lista MHamortecido OndasDocumento2 páginasLista MHamortecido OndasNatã Nadher RezendeAinda não há avaliações
- 03 - OndulatóriaDocumento11 páginas03 - OndulatóriafmojrAinda não há avaliações
- Propriedades Do SomDocumento7 páginasPropriedades Do SomManuela SofiaAinda não há avaliações
- Fenómenos OndulatóriosDocumento34 páginasFenómenos OndulatóriosLara MesquitaAinda não há avaliações
- Ondas de luz e sua propagaçãoDocumento4 páginasOndas de luz e sua propagação919929893Ainda não há avaliações
- Refração da luz em acrílicoDocumento6 páginasRefração da luz em acrílicoJustina VieiraAinda não há avaliações
- Minicurso de Antenas 6Documento41 páginasMinicurso de Antenas 6Aline DiasAinda não há avaliações
- Lista 9 Ano Joao Paulo OndulatoriaDocumento21 páginasLista 9 Ano Joao Paulo Ondulatoriadudaa vaaAinda não há avaliações
- Avaliação de Ciências sobre tabela periódica e ondas eletromagnéticasDocumento1 páginaAvaliação de Ciências sobre tabela periódica e ondas eletromagnéticasLeir VianaAinda não há avaliações