Você também pode gostar
- 3 - Téc. Análise Sistemas TrifásicosDocumento14 páginas3 - Téc. Análise Sistemas TrifásicosgugaseibertAinda não há avaliações
- FT - Serie - 1 - 1819Documento39 páginasFT - Serie - 1 - 1819Madalena BarrosAinda não há avaliações
- Trabalho de Modelagem de Sistemas PDFDocumento7 páginasTrabalho de Modelagem de Sistemas PDFViniciusAinda não há avaliações
- Aula 02 - CIRCUITOS DE CORRENTE ALTERNADADocumento7 páginasAula 02 - CIRCUITOS DE CORRENTE ALTERNADADanilo Afonso PedroAinda não há avaliações
- Análise No Domínio Da Frequencia - Série de Fourier 15 04 2019Documento34 páginasAnálise No Domínio Da Frequencia - Série de Fourier 15 04 2019Vinicius Campos FantiAinda não há avaliações
- ESTA002-17 Laboratorio 1Documento11 páginasESTA002-17 Laboratorio 1IAMAinda não há avaliações
- Aula 8Documento20 páginasAula 8Ana Beatriz BrazAinda não há avaliações
- ESTA002-17 Laboratorio 1Documento13 páginasESTA002-17 Laboratorio 1Samuel AquinoAinda não há avaliações
- Introducao SEE1bDocumento25 páginasIntroducao SEE1bPaulo H TavaresAinda não há avaliações
- Laboratorio1 3Q2017Documento11 páginasLaboratorio1 3Q2017Vitor MiguelAinda não há avaliações
- Curto Circuito ConceitosDocumento25 páginasCurto Circuito ConceitosAssis JúniorAinda não há avaliações
- Aula 04 - Modelagem de Sinais e SistemasDocumento4 páginasAula 04 - Modelagem de Sinais e SistemasjorgedemedeirosAinda não há avaliações
- ED3 ASDL AnaliseDeFourier r2Documento6 páginasED3 ASDL AnaliseDeFourier r2Arthur Vieira de Assis MoreiraAinda não há avaliações
- Ufc Cfisica09Documento6 páginasUfc Cfisica09Sergio Fiuza FiuzaAinda não há avaliações
- Potencia RPSDocumento11 páginasPotencia RPSMauricioAinda não há avaliações
- Cap 3 016 Formas de OndaDocumento13 páginasCap 3 016 Formas de OndaMariana Campos GameiroAinda não há avaliações
- Tema5 - Integrais de Linha e Campos VetoriaisDocumento70 páginasTema5 - Integrais de Linha e Campos Vetoriaismcbneto5470Ainda não há avaliações
- Transformada de Laplace Na Análise de CircuitosDocumento29 páginasTransformada de Laplace Na Análise de CircuitosIsmaily TavaresAinda não há avaliações
- Lista 2 de Derivadas (Aplicações)Documento8 páginasLista 2 de Derivadas (Aplicações)tanderlayAinda não há avaliações
- Linhas de TransmissãoDocumento61 páginasLinhas de TransmissãoLucas EduardoAinda não há avaliações
- Calculo 2-Integrais de Linha e Campos VetoriaisDocumento42 páginasCalculo 2-Integrais de Linha e Campos VetoriaisWatson MatsumotoAinda não há avaliações
- Aula 1 - Funções Com Valores VetoriaisDocumento13 páginasAula 1 - Funções Com Valores VetoriaisMarkus DämonAinda não há avaliações
- Lista P3 - MAT 137 - 2013-IDocumento6 páginasLista P3 - MAT 137 - 2013-ILeo ValenteAinda não há avaliações
- Caracterização Das Distorções Harmônicas de Tensão em Circuitos Secundários de Baixa TensãoDocumento6 páginasCaracterização Das Distorções Harmônicas de Tensão em Circuitos Secundários de Baixa TensãoFlávio FerreiraAinda não há avaliações
- Equação de SchrodingerDocumento8 páginasEquação de SchrodingerJoão NunesAinda não há avaliações
- Lab II Sinusódes - Valores Medio e Eficaz - 200W - 2023 - SoluçãoDocumento9 páginasLab II Sinusódes - Valores Medio e Eficaz - 200W - 2023 - SoluçãoPaulo CardilloAinda não há avaliações
- Laboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDocumento16 páginasLaboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDavid AlexanderAinda não há avaliações
- 5 - Integrais de Linha e Campos VetoriaisDocumento66 páginas5 - Integrais de Linha e Campos VetoriaisDaniel LeoneAinda não há avaliações
- 04 VodoviDocumento27 páginas04 VodoviSlaven IvanovicAinda não há avaliações
- 0de7f905-01fd-4032-a0bb-7bd8912e82cfDocumento4 páginas0de7f905-01fd-4032-a0bb-7bd8912e82cfThiago ZamboniAinda não há avaliações
- Resumão Vibracoes PDFDocumento146 páginasResumão Vibracoes PDFFabio Miguel RodriguesAinda não há avaliações
- Modulo2 - Indutores e CapacitoresDocumento56 páginasModulo2 - Indutores e Capacitoresmcbneto5470Ainda não há avaliações
- Prova1 2018 2Documento2 páginasProva1 2018 2Carlos Aurélio Faria da RochaAinda não há avaliações
- Aula 02Documento15 páginasAula 02Mir4 BritoAinda não há avaliações
- Análise de Circuitos SenoidaisDocumento58 páginasAnálise de Circuitos SenoidaisIsmaily TavaresAinda não há avaliações
- Aula 04 Espaco EstadosDocumento32 páginasAula 04 Espaco EstadosDébora MarquesAinda não há avaliações
- Teste 2 EA614 1s2020Documento2 páginasTeste 2 EA614 1s2020Joao Das NevesAinda não há avaliações
- LISTA 03 FISICA II OndasDocumento10 páginasLISTA 03 FISICA II OndasNilson EvilásioAinda não há avaliações
- PG13-Propagacao Entre Planos ParalelosDocumento7 páginasPG13-Propagacao Entre Planos ParalelosJoão Dos Reis NetoAinda não há avaliações
- Controle II Aula 1bDocumento8 páginasControle II Aula 1bLUCAS GABRIEL SILVA BARRA CORREAAinda não há avaliações
- Sebenta ElectrotecniaDocumento97 páginasSebenta ElectrotecniaRicardo CruzAinda não há avaliações
- Prova de DinâmicaDocumento3 páginasProva de DinâmicaAnonymous R1jNr3Ainda não há avaliações
- Analogia Entre Sinais e VetoresDocumento21 páginasAnalogia Entre Sinais e VetoresVirgilio Jose Cambraia LopesAinda não há avaliações
- Aula3 - Analise Senoidal e Fasores Parte 2 PDFDocumento24 páginasAula3 - Analise Senoidal e Fasores Parte 2 PDFGuilherme NardezAinda não há avaliações
- Dca0110 Modelagem List-ExercDocumento14 páginasDca0110 Modelagem List-ExercBio HueAinda não há avaliações
- Prática 06Documento15 páginasPrática 06Thiago DuarteAinda não há avaliações
- 3 Retificadores Monofásicos Não Controlados Parte 1Documento19 páginas3 Retificadores Monofásicos Não Controlados Parte 1Abel HenriqueAinda não há avaliações
- Lista0 SinaisDocumento4 páginasLista0 SinaisPedro Henrique GomesAinda não há avaliações
- Sistemas de Potência - Apostila de Introdução À Análise de Sistemas de Potência - Rui N. Rego - UFRNDocumento123 páginasSistemas de Potência - Apostila de Introdução À Análise de Sistemas de Potência - Rui N. Rego - UFRNJacqueline SatikoAinda não há avaliações
- EPC03 - Modelagem de Sistemas Dinâmicos e DiscretizaçãoDocumento3 páginasEPC03 - Modelagem de Sistemas Dinâmicos e DiscretizaçãoCamila Yumi YachiroAinda não há avaliações
- EM Vibrações MecânicasDocumento12 páginasEM Vibrações MecânicasRobson OliveiraAinda não há avaliações
- Aula 6Documento7 páginasAula 6Ricardo RibeiroAinda não há avaliações
- VibracoesDocumento34 páginasVibracoessirilocoAinda não há avaliações
- EletrotecnicaDocumento26 páginasEletrotecnicaIvan AndradaAinda não há avaliações
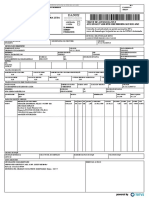
- Danfe: Identificação Do Emitente Mazer Distribuidora Ltda Chave de Acesso Da Nf-EDocumento1 páginaDanfe: Identificação Do Emitente Mazer Distribuidora Ltda Chave de Acesso Da Nf-EGabriel AlvesAinda não há avaliações
- Cargas Lineares e Não Lineares e Fator de PotênciaDocumento12 páginasCargas Lineares e Não Lineares e Fator de PotênciaGabriel AlvesAinda não há avaliações
- Grade Curricular EletrotécnicaDocumento1 páginaGrade Curricular EletrotécnicaGabriel AlvesAinda não há avaliações
- Cargas Lineares e Não Lineares e Fator de PotênciaDocumento12 páginasCargas Lineares e Não Lineares e Fator de PotênciaGabriel AlvesAinda não há avaliações
- EBook - MP 998Documento28 páginasEBook - MP 998Gabriel AlvesAinda não há avaliações
- Orçamento - EnoqueDocumento10 páginasOrçamento - EnoqueGabriel AlvesAinda não há avaliações
- (Ebook) Financiamento Energia SolarDocumento14 páginas(Ebook) Financiamento Energia SolarGabriel AlvesAinda não há avaliações
- Fator de Potência - o Guia DefinitivoDocumento12 páginasFator de Potência - o Guia DefinitivoGabriel Alves100% (1)
- Tensão de Flutuação DCDocumento4 páginasTensão de Flutuação DCGabriel AlvesAinda não há avaliações
- Estudo Sobre SMARTGRID'sDocumento8 páginasEstudo Sobre SMARTGRID'sGabriel AlvesAinda não há avaliações
- Manual Nutrologia SBP 2009Documento116 páginasManual Nutrologia SBP 2009Estefânia Siqueira100% (1)
- Verbos Graficamente ComplexosDocumento6 páginasVerbos Graficamente ComplexosHelenaAinda não há avaliações
- Bênção Da Obra Da CapelaDocumento6 páginasBênção Da Obra Da Capelajoaoguilherme_fscAinda não há avaliações
- Panfleto Deficiencia MentalDocumento2 páginasPanfleto Deficiencia Mentalzearaujomota8010Ainda não há avaliações
- Como Fazer Minha Dança PrópriaDocumento6 páginasComo Fazer Minha Dança PrópriaValéria FerrazAinda não há avaliações
- Script Caixa Tem AtualizadoDocumento3 páginasScript Caixa Tem Atualizadovictorborba8400Ainda não há avaliações
- Instituto Superior Politécnico de Tecnologias E Ciências 222Documento20 páginasInstituto Superior Politécnico de Tecnologias E Ciências 222Isaac FialhoAinda não há avaliações
- O Mirtilo É Uma Espécie Que Exige Solos ArenososDocumento14 páginasO Mirtilo É Uma Espécie Que Exige Solos Arenososcheeseman217669Ainda não há avaliações
- Reciclagem de Cartuchos de TonerDocumento21 páginasReciclagem de Cartuchos de TonercrisrnascAinda não há avaliações
- Cabala e Mercado FinanceiroDocumento3 páginasCabala e Mercado FinanceiroraphaelviscondeAinda não há avaliações
- MANUAL AVA - IBREPTRAN (1) - CompressedDocumento15 páginasMANUAL AVA - IBREPTRAN (1) - CompressedIdavan BarbosaAinda não há avaliações
- 1° e 2° Ano - Meu Nome AtividadeDocumento53 páginas1° e 2° Ano - Meu Nome AtividadeHelena BasilioAinda não há avaliações
- O Que É AsmaDocumento2 páginasO Que É AsmaThaianne OliveiraAinda não há avaliações
- Tipos de Estudos Epidemiológicos: Unidade Saúde Pública de Torres Novas Internato Médico - Ano ComumDocumento31 páginasTipos de Estudos Epidemiológicos: Unidade Saúde Pública de Torres Novas Internato Médico - Ano ComumHugo VianaAinda não há avaliações
- O FascismoDocumento2 páginasO FascismoWANESSA SILVA DE OLIVEIRAAinda não há avaliações
- PatacoesDocumento207 páginasPatacoesFelix MagnoAinda não há avaliações
- Técnicas Anestésicas MaxilaDocumento8 páginasTécnicas Anestésicas MaxilaEduvaldo JúniorAinda não há avaliações
- Companhia Das Letras Recolhe Livro Com Crianças Brincando em Navio NegreiroDocumento30 páginasCompanhia Das Letras Recolhe Livro Com Crianças Brincando em Navio NegreiroMaria GabrielaAinda não há avaliações
- A Coragem Da FéDocumento35 páginasA Coragem Da FéMárcia Ap Rodrigues100% (2)
- SD Aniversario Do Senhor AlfabetoDocumento52 páginasSD Aniversario Do Senhor Alfabetofernando kellyAinda não há avaliações
- APOSTILA - HISTO - RIA NAVAL - LIVRO DO VIDIGAL - Aula 7Documento5 páginasAPOSTILA - HISTO - RIA NAVAL - LIVRO DO VIDIGAL - Aula 7mark_990566444Ainda não há avaliações
- Hans Tep LLDocumento5 páginasHans Tep LLClaudete DemolinerAinda não há avaliações
- Evolução Das Políticas de Saúde No Brasil - 1808-1904Documento2 páginasEvolução Das Políticas de Saúde No Brasil - 1808-1904Danielle Silva e SilvaAinda não há avaliações
- Aula Pratica 2Documento2 páginasAula Pratica 2bolapaulinoAinda não há avaliações
- Novo Espaço 12 - Caderno PráticoDocumento112 páginasNovo Espaço 12 - Caderno PráticoDina Medeiros83% (6)
- Eurolab Ações CorretivasDocumento8 páginasEurolab Ações CorretivasLabovida RoraimaAinda não há avaliações
- Plano de Curso: Serviço Nacional de Aprendizagem Industrial Departamento Regional de São PauloDocumento21 páginasPlano de Curso: Serviço Nacional de Aprendizagem Industrial Departamento Regional de São PauloHRD Manutencao e QualidadeAinda não há avaliações
- Advpl IDocumento78 páginasAdvpl ILuisAinda não há avaliações
- Uma Visão Geral Do Livro Didático de Língua Portuguesa Do 6º Ano e A Importância para A Leitura Por Meio Do Gênero NarrativoDocumento6 páginasUma Visão Geral Do Livro Didático de Língua Portuguesa Do 6º Ano e A Importância para A Leitura Por Meio Do Gênero NarrativoDoralyce SantosAinda não há avaliações
- Carta de IntençãoDocumento3 páginasCarta de IntençãoThaís CaetanópolisAinda não há avaliações