Você também pode gostar
- Laboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDocumento16 páginasLaboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDavid AlexanderAinda não há avaliações
- Aula 04 Espaco EstadosDocumento32 páginasAula 04 Espaco EstadosDébora MarquesAinda não há avaliações
- Lista 1Documento1 páginaLista 1EduardaAinda não há avaliações
- Aula 8Documento20 páginasAula 8Ana Beatriz BrazAinda não há avaliações
- Controle II Aula 1bDocumento8 páginasControle II Aula 1bLUCAS GABRIEL SILVA BARRA CORREAAinda não há avaliações
- Exercicios 03Documento2 páginasExercicios 03bpvascohotmail.comAinda não há avaliações
- Controle de Processos p2Documento68 páginasControle de Processos p2Guilherme BenevidesAinda não há avaliações
- 2 - Representação Espaço Dos EstadosDocumento7 páginas2 - Representação Espaço Dos EstadoscarlosAinda não há avaliações
- Analise Aula04Documento54 páginasAnalise Aula04Gabriel SilvaAinda não há avaliações
- 1 Lista de ExercíciosDocumento11 páginas1 Lista de ExercíciosFelipeBandeiraAinda não há avaliações
- Lista 1Documento3 páginasLista 1luis volpeAinda não há avaliações
- DSL Aula 5Documento28 páginasDSL Aula 5Mariana MoreiraAinda não há avaliações
- Análise No Domínio Da Frequencia - Série de Fourier 15 04 2019Documento34 páginasAnálise No Domínio Da Frequencia - Série de Fourier 15 04 2019Vinicius Campos FantiAinda não há avaliações
- Lista 1Documento4 páginasLista 1Luiz R. LimaAinda não há avaliações
- EEL 7052 - Prova 1Documento4 páginasEEL 7052 - Prova 1Gabriel GoulartAinda não há avaliações
- Apostila Controle - 03 - Função de Transferência e Diagrama de BlocosDocumento35 páginasApostila Controle - 03 - Função de Transferência e Diagrama de Blocoslnery_1Ainda não há avaliações
- Lista 1Documento8 páginasLista 1Sâmela RochaAinda não há avaliações
- Notas de Aula Conceitos Básicos de Controle - 2018.2Documento37 páginasNotas de Aula Conceitos Básicos de Controle - 2018.2anderssonoliveiraAinda não há avaliações
- Aula 02Documento15 páginasAula 02Mir4 BritoAinda não há avaliações
- Aulas Teóricas TCS 06 - 07 (Parte 3)Documento104 páginasAulas Teóricas TCS 06 - 07 (Parte 3)Rafael GagoAinda não há avaliações
- Prova1 2018 2Documento2 páginasProva1 2018 2Carlos Aurélio Faria da RochaAinda não há avaliações
- 1 - Lista - SinaisDocumento4 páginas1 - Lista - SinaisThiagoPinheiroAinda não há avaliações
- 3 Lista - Fourier - RespondidaDocumento11 páginas3 Lista - Fourier - RespondidaHigor FerreiraAinda não há avaliações
- EDL ExistenciaDocumento20 páginasEDL ExistenciaJoão Luiz CarvalhoAinda não há avaliações
- Lista de Exercícios 03Documento1 páginaLista de Exercícios 03Fabio HenriqueAinda não há avaliações
- EPC03 - Modelagem de Sistemas Dinâmicos e DiscretizaçãoDocumento3 páginasEPC03 - Modelagem de Sistemas Dinâmicos e DiscretizaçãoCamila Yumi YachiroAinda não há avaliações
- Exercicios ResolvidosDocumento12 páginasExercicios ResolvidosMateus Toledo100% (1)
- Prova de DinâmicaDocumento3 páginasProva de DinâmicaAnonymous R1jNr3Ainda não há avaliações
- Aula 2 PDFDocumento27 páginasAula 2 PDFPedro MartinsAinda não há avaliações
- DSL Aula 3Documento27 páginasDSL Aula 3Mariana MoreiraAinda não há avaliações
- Analise 01 20102Documento2 páginasAnalise 01 20102mpxisAinda não há avaliações
- Introdução A Sinais e Sistemas: Prof. Glauber BranteDocumento42 páginasIntrodução A Sinais e Sistemas: Prof. Glauber BranteFabio HenriqueAinda não há avaliações
- Trabalho de Modelagem de Sistemas PDFDocumento7 páginasTrabalho de Modelagem de Sistemas PDFViniciusAinda não há avaliações
- Resposta Impulsiva e ConvoluçãoDocumento10 páginasResposta Impulsiva e ConvoluçãoGuilherme Fróes SilvaAinda não há avaliações
- Azdoc Tips-Arquivo PDFDocumento20 páginasAzdoc Tips-Arquivo PDFalissonafsAinda não há avaliações
- Lista 02 - GabaritoDocumento14 páginasLista 02 - GabaritoGilvan VelosoAinda não há avaliações
- Lista 02 - GabaritoDocumento14 páginasLista 02 - GabaritoLucas SenaAinda não há avaliações
- Slit Sistemas Lineares e InvariantesDocumento51 páginasSlit Sistemas Lineares e InvariantesAndré BertoniAinda não há avaliações
- Lista 4Documento3 páginasLista 4luis volpeAinda não há avaliações
- Aplicação Do Método de Integração Trapezoidal em Sistemas ElétricosDocumento7 páginasAplicação Do Método de Integração Trapezoidal em Sistemas Elétricosvinicis silvaAinda não há avaliações
- Calculo Vetorial Exercicios Resolvidos-Cap1Documento14 páginasCalculo Vetorial Exercicios Resolvidos-Cap1Alexandre Calazans100% (1)
- Tema5 - Integrais de Linha e Campos VetoriaisDocumento70 páginasTema5 - Integrais de Linha e Campos Vetoriaismcbneto5470Ainda não há avaliações
- Lista 02Documento2 páginasLista 02Guilherme Meireles100% (1)
- Aula 4Documento17 páginasAula 4Investigação OperacionalAinda não há avaliações
- 11354216022012cálculo III Aula 7Documento21 páginas11354216022012cálculo III Aula 7Roberto NascimentoAinda não há avaliações
- SignalsDocumento9 páginasSignalsjoyAinda não há avaliações
- Analogia Entre Sinais e VetoresDocumento21 páginasAnalogia Entre Sinais e VetoresVirgilio Jose Cambraia LopesAinda não há avaliações
- Sistemas EdoDocumento11 páginasSistemas Edomj_sousaAinda não há avaliações
- AAP3 - Sistema - Lineares - 2022 - 2 CORRIGIDODocumento9 páginasAAP3 - Sistema - Lineares - 2022 - 2 CORRIGIDOMarloni RibeiroAinda não há avaliações
- ED2 ASDL Sistemas1aOrdemDocumento6 páginasED2 ASDL Sistemas1aOrdemArthur Vieira de Assis MoreiraAinda não há avaliações
- Lista 02Documento2 páginasLista 02Daltro OliveiraAinda não há avaliações
- Aula 04 - Sistemas Lineares e Invariantes No TempoDocumento88 páginasAula 04 - Sistemas Lineares e Invariantes No TempoPedro T V SouzaAinda não há avaliações
- Grand SinusDocumento10 páginasGrand SinusGabriel AlvesAinda não há avaliações
- Lista 1 CMA211Documento2 páginasLista 1 CMA211Cleber HenriqueAinda não há avaliações
- SSE Lista1Documento7 páginasSSE Lista1Gabriel de CarvalhoAinda não há avaliações
- Exercicios Cap3 RespostasDocumento5 páginasExercicios Cap3 RespostasGabriel MazzoniAinda não há avaliações
- Manual Do Consumidor Livre Ou EspecialDocumento16 páginasManual Do Consumidor Livre Ou EspecialjorgedemedeirosAinda não há avaliações
- Manual Da Qualidade Iso 9001 2015Documento37 páginasManual Da Qualidade Iso 9001 2015jorgedemedeiros100% (2)
- VLE02Documento29 páginasVLE02jorgedemedeiros100% (1)
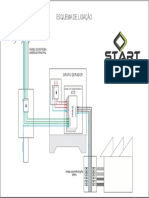
- DESENHO LIGAÇAO GERADOR AUTOMATICO-simplificado PDFDocumento1 páginaDESENHO LIGAÇAO GERADOR AUTOMATICO-simplificado PDFjorgedemedeirosAinda não há avaliações
- Experiment 1 Balanca de TorcaoDocumento6 páginasExperiment 1 Balanca de TorcaoSidónio EusébioAinda não há avaliações
- Equilíbrio Do Corpo Extenso-Parte 01Documento53 páginasEquilíbrio Do Corpo Extenso-Parte 01Física 1o, 2o e 3o EsqAinda não há avaliações
- Lista de Exercícios TorqueDocumento2 páginasLista de Exercícios TorqueThamiris Frade0% (1)
- Dimensionamento de EixosDocumento35 páginasDimensionamento de EixoshamiltonnovaisAinda não há avaliações
- Capítulo 4B - BinárioDocumento19 páginasCapítulo 4B - BinárioGustavo KajiyaAinda não há avaliações
- Centro de GravidadeDocumento3 páginasCentro de GravidadeAnceto Albertina LangaAinda não há avaliações
- Robotica Teoria e Pratica ROBOTICA TEORIDocumento173 páginasRobotica Teoria e Pratica ROBOTICA TEORIRafael SantosAinda não há avaliações
- Erx KMSXDocumento214 páginasErx KMSXanderson-ama1Ainda não há avaliações
- Alavancas PDFDocumento23 páginasAlavancas PDFMardenNunesAinda não há avaliações
- Máquinas de Corrente Contínua - Motor CCDocumento43 páginasMáquinas de Corrente Contínua - Motor CCfaustogvAinda não há avaliações
- CARACTERÍSTICAS Dos Motores CC - AULADocumento5 páginasCARACTERÍSTICAS Dos Motores CC - AULAGuilherme VascoAinda não há avaliações
- Resoluções EUF 2016, 2017 e 2018Documento61 páginasResoluções EUF 2016, 2017 e 2018Junior Lima67% (9)
- Esdras - A Segunda Lei de Newton para As RotaçõesDocumento3 páginasEsdras - A Segunda Lei de Newton para As RotaçõesESDRAS MARCIO ARAUJO LIMAAinda não há avaliações
- Aula 11 e 12 - Medição de Potência AtivaDocumento52 páginasAula 11 e 12 - Medição de Potência AtivaJoão Lucas100% (2)
- Projeto de Graduação - Inversores de FrequênciaDocumento114 páginasProjeto de Graduação - Inversores de FrequênciaCremalheraAinda não há avaliações
- Resumo Cap 11 FÍSICADocumento5 páginasResumo Cap 11 FÍSICACarlos HenriqueAinda não há avaliações
- Arco Base A Unidade Mecanica Da Terapia BioprogressivaDocumento11 páginasArco Base A Unidade Mecanica Da Terapia Bioprogressivaterryharden100% (1)
- Tudo para o TesteDocumento21 páginasTudo para o TesteJoana AguiarAinda não há avaliações
- Curvadeira AutoDocumento57 páginasCurvadeira Automarcelo rojasAinda não há avaliações
- 255-8905 - 416E LL - Parts - O&MDocumento48 páginas255-8905 - 416E LL - Parts - O&MIsaque Elias Correia100% (1)
- Mecanica Dos SólidosDocumento14 páginasMecanica Dos SólidosPaulo BorgesAinda não há avaliações
- ResmatI TorcaoDocumento60 páginasResmatI TorcaoPedro YgorAinda não há avaliações
- Exercicio 1 Resistencia Dos Materiais 1Documento4 páginasExercicio 1 Resistencia Dos Materiais 1Pedro Henrique LeiteAinda não há avaliações
- Fisica I USP P3 2019Documento11 páginasFisica I USP P3 2019Vitor HugoAinda não há avaliações
- Aula 1Documento20 páginasAula 1Silmara SalomãoAinda não há avaliações
- Maquinas Elétricas PDFDocumento200 páginasMaquinas Elétricas PDFFernanda Lima100% (1)
- CINESIOLOGIA - Unidade VI - Conceitos de Cinética para Análise Do Movimento HumanoDocumento34 páginasCINESIOLOGIA - Unidade VI - Conceitos de Cinética para Análise Do Movimento HumanothiagoAinda não há avaliações
- 45RFEDocumento81 páginas45RFEJorge AutocarAinda não há avaliações
- Manual de Serviço Yanmar-YPD-MP2/YPD-MP4Documento66 páginasManual de Serviço Yanmar-YPD-MP2/YPD-MP4Hendrick Zarate100% (1)