Você também pode gostar
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- RELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETODocumento18 páginasRELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETORaniere LiraAinda não há avaliações
- Controladores PIDDocumento26 páginasControladores PIDRejane BarbosaAinda não há avaliações
- Inversor de frequência fotovoltaico CC/CADocumento14 páginasInversor de frequência fotovoltaico CC/CARebson MartinsAinda não há avaliações
- Trabalho PID AnalogicoDocumento9 páginasTrabalho PID AnalogicoMarcus Vinicius100% (1)
- Controle PID: Teoria e Projeto de ControladoresDocumento29 páginasControle PID: Teoria e Projeto de ControladoresTiago BitencourtAinda não há avaliações
- Implementando Um Conversor Mono->tri Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Conversor Mono->tri Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Relatório 03 - 03Documento14 páginasRelatório 03 - 03Paloma Medeiros BaquerAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Sistema Microprocessado para Controle de Posição AngularDocumento14 páginasSistema Microprocessado para Controle de Posição AngularÉlisson RíllerAinda não há avaliações
- Controle PIDDocumento17 páginasControle PIDubbi_wanAinda não há avaliações
- Roteiro Do Trabalho LSCCDocumento3 páginasRoteiro Do Trabalho LSCCRodrigo ResendeAinda não há avaliações
- Controle de sistemas lineares com amplificadores operacionaisDocumento19 páginasControle de sistemas lineares com amplificadores operacionaisDiego YanezAinda não há avaliações
- Aula 10 Simulink Sintonia PIDDocumento53 páginasAula 10 Simulink Sintonia PIDMarcio DiegoAinda não há avaliações
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Documento22 páginasModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- Roteiro de Utilização de Controlador PID Utilizando CLP Micrologix 1200Documento13 páginasRoteiro de Utilização de Controlador PID Utilizando CLP Micrologix 1200Emerson RuizAinda não há avaliações
- Projeto PID e métodos de sintoniaDocumento29 páginasProjeto PID e métodos de sintoniaMarcos AraujoAinda não há avaliações
- PLCs e automação industrialDocumento16 páginasPLCs e automação industrialEdnercio Luis100% (1)
- Implementando PID em sistemas embarcadosDocumento44 páginasImplementando PID em sistemas embarcadosThiago WerneckAinda não há avaliações
- PLC Ling LadderDocumento48 páginasPLC Ling Laddernuferro9550Ainda não há avaliações
- ECA602 - Lista - 1 - Controle ClássicoDocumento4 páginasECA602 - Lista - 1 - Controle ClássicoThiago ValimAinda não há avaliações
- Controle1 - Prova2 - 2021 AV2Documento6 páginasControle1 - Prova2 - 2021 AV2Marcantoni TavaresAinda não há avaliações
- Controlador PIDDocumento27 páginasControlador PIDcmgobboAinda não há avaliações
- Analise Dos ResultadosDocumento17 páginasAnalise Dos ResultadosDayanaAinda não há avaliações
- SCADA: Sistemas de Supervisão e ControleDocumento21 páginasSCADA: Sistemas de Supervisão e ControleJose Roberto Rodrigues PereiraAinda não há avaliações
- Controle LED 40Documento10 páginasControle LED 40Camila A. CostaAinda não há avaliações
- Respostas Capítulo 1Documento15 páginasRespostas Capítulo 1Eduardo AlmeidaAinda não há avaliações
- Aula - Cap6 - v221101 - Controle MF - Parte 1 - Controle PDocumento81 páginasAula - Cap6 - v221101 - Controle MF - Parte 1 - Controle Prenatoalex.17Ainda não há avaliações
- Linguagem de Programação Dos Controladores ProgramáveisDocumento49 páginasLinguagem de Programação Dos Controladores ProgramáveisGilberto MourãoAinda não há avaliações
- Controlo PID Discreto: Métodos de Sintonização e ModificaçõesDocumento7 páginasControlo PID Discreto: Métodos de Sintonização e ModificaçõesRaniere LiraAinda não há avaliações
- Controle de velocidade de motor CC com sinal analógicoDocumento5 páginasControle de velocidade de motor CC com sinal analógicoLeonardo CampagnolloAinda não há avaliações
- PID Aero Estabilizador ArduinoDocumento6 páginasPID Aero Estabilizador ArduinoMkl JeffAinda não há avaliações
- Controlador PID Digital Parte 2Documento17 páginasControlador PID Digital Parte 2Macedo CastroAinda não há avaliações
- Relatório - Projeto 1 - Root LocusDocumento27 páginasRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAAinda não há avaliações
- Sensores Industriais - GabaritoDocumento16 páginasSensores Industriais - GabaritoRicardo Pasquati Pontarolli100% (1)
- Prova3 Partev1Documento11 páginasProva3 Partev1matheus AlmeidaAinda não há avaliações
- 6495 Assessoria Atividade 2 - Informática Industrial - 51 2024Documento3 páginas6495 Assessoria Atividade 2 - Informática Industrial - 51 2024matheus koniczAinda não há avaliações
- Ação de Controladores PID IIDocumento11 páginasAção de Controladores PID IINelson JuniorAinda não há avaliações
- Sistema Aplicado A Controle de Posição Utilizando Algoritmo PIDDocumento7 páginasSistema Aplicado A Controle de Posição Utilizando Algoritmo PIDdanielAinda não há avaliações
- Modelagem do Sistema Servo Posicionador LJ CreateDocumento20 páginasModelagem do Sistema Servo Posicionador LJ CreateJoão Lucas Genoveze VarottiAinda não há avaliações
- Fonte Digital: Controle e GerenciamentoDocumento4 páginasFonte Digital: Controle e GerenciamentoPaulo chagas paulo ratoAinda não há avaliações
- Trabalho Final - Controle DigitalDocumento35 páginasTrabalho Final - Controle DigitalWesleyAinda não há avaliações
- Modelagem Matamática e Controle de Um Sistema "Ball and Beam"Documento21 páginasModelagem Matamática e Controle de Um Sistema "Ball and Beam"americo079Ainda não há avaliações
- Controle de Velocidade de Motor CC com Ball e HoopDocumento9 páginasControle de Velocidade de Motor CC com Ball e Hoopgabi freitasAinda não há avaliações
- Sistema de Regulação Automática de Um Sistema Térmico - Trabalho de ControloDocumento8 páginasSistema de Regulação Automática de Um Sistema Térmico - Trabalho de ControloGerson AvelinoAinda não há avaliações
- Como acionar uma lâmpada temporizada com PLCDocumento9 páginasComo acionar uma lâmpada temporizada com PLCËnesson VicenteAinda não há avaliações
- Controle de Luminosidade de LED - Alexandre e CélioDocumento14 páginasControle de Luminosidade de LED - Alexandre e Célioalex.cesar99Ainda não há avaliações
- Prática - CD600Documento8 páginasPrática - CD600GessicaBarbosaAinda não há avaliações
- Lógica Ladder PIC AVRDocumento7 páginasLógica Ladder PIC AVRdionesiopaulonAinda não há avaliações
- Linguagem Ladder: programação visual para CLPsDocumento19 páginasLinguagem Ladder: programação visual para CLPsGustavo SousaAinda não há avaliações
- ÍndiceDocumento9 páginasÍndiceËnesson VicenteAinda não há avaliações
- CLP-Introdução a Automação e Sistemas de ControleDocumento84 páginasCLP-Introdução a Automação e Sistemas de ControleGilnei LoschAinda não há avaliações
- Micrologix PID SinaisDocumento13 páginasMicrologix PID SinaisJulho100% (1)
- Aula 10 - PCC - Controladores de ProcessosDocumento18 páginasAula 10 - PCC - Controladores de ProcessosthaysAinda não há avaliações
- Relatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento20 páginasRelatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. ZucatelliAinda não há avaliações
- Sensores Industriais - Fundamentos e AplicaçõesDocumento19 páginasSensores Industriais - Fundamentos e AplicaçõesRafael MorenoAinda não há avaliações
- Atividade 2 - MatheusDocumento7 páginasAtividade 2 - MatheusMatheus EduardoAinda não há avaliações
- A3 Estufa TeoriaDocumento11 páginasA3 Estufa TeoriaMatheus EduardoAinda não há avaliações
- A3 Estufa TeoriaDocumento11 páginasA3 Estufa TeoriaMatheus EduardoAinda não há avaliações
- A3 MatheusDocumento11 páginasA3 MatheusMatheus EduardoAinda não há avaliações
- NR 12 - Titulador PotenciometroDocumento184 páginasNR 12 - Titulador PotenciometroCPSSTAinda não há avaliações
- Manual do Inmetro sobre aplicação da marcaDocumento12 páginasManual do Inmetro sobre aplicação da marcaEverson Cristiano MoreiraAinda não há avaliações
- Aula 1 Hackers Do BemDocumento8 páginasAula 1 Hackers Do BemMarcio RamosAinda não há avaliações
- Monitor raios e condições meteorológicas com detector de raiosDocumento12 páginasMonitor raios e condições meteorológicas com detector de raiosArnaldo PimentelAinda não há avaliações
- Introdução ao Servidor/Cliente SAPDocumento1 páginaIntrodução ao Servidor/Cliente SAPMSites SignageAinda não há avaliações
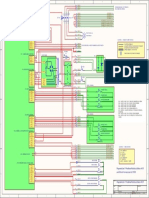
- FT-35353-R01 - Fiação Plataforma AC05 (Controladora v3.1)Documento1 páginaFT-35353-R01 - Fiação Plataforma AC05 (Controladora v3.1)Robespierre NogueiraAinda não há avaliações
- Representação gráfica de sinais em sistemas de 1a ordemDocumento14 páginasRepresentação gráfica de sinais em sistemas de 1a ordemLeonnardo VyctorAinda não há avaliações
- Modelo Ciclo Pdca EtapasDocumento2 páginasModelo Ciclo Pdca EtapasedersonAinda não há avaliações
- Guia instalação SlackelDocumento19 páginasGuia instalação SlackelHigashi MonteiroAinda não há avaliações
- Treinamento Caminhão Cliente ValeDocumento242 páginasTreinamento Caminhão Cliente ValeTiagohowpy Ramos100% (1)
- Visualização de BoletoDocumento1 páginaVisualização de BoletoMichael Max AmorimAinda não há avaliações
- Macaco Com BananaDocumento17 páginasMacaco Com BananaAna Laura Marçal Monsores100% (3)
- Como Calibrar A Bateria de Qualquer Celular AndroidDocumento10 páginasComo Calibrar A Bateria de Qualquer Celular Androidjamafisica7981Ainda não há avaliações
- Curvas Do Destino - Elite de Nova Iorque 1 - MCDocumento334 páginasCurvas Do Destino - Elite de Nova Iorque 1 - MCRaissa Sousa100% (4)
- Teste 0754Documento2 páginasTeste 0754nuno silvestre100% (2)
- Sap Gestão de AtendDocumento4 páginasSap Gestão de AtendCharlestst TstAinda não há avaliações
- Manual Gerenciador FinanceiroDocumento71 páginasManual Gerenciador FinanceiromurilofmAinda não há avaliações
- Sec21 Ufcd 0661Documento3 páginasSec21 Ufcd 0661NádiaAinda não há avaliações
- Apoio Desenvolvimento SoftwareDocumento69 páginasApoio Desenvolvimento SoftwarePedro lendaAinda não há avaliações
- Modelo BrainstormingDocumento17 páginasModelo BrainstormingAlex PereiraAinda não há avaliações
- Os Melhores 10 Add-Ins para Revit - SPBIM - ARQUITETURA DIGITALDocumento14 páginasOs Melhores 10 Add-Ins para Revit - SPBIM - ARQUITETURA DIGITALlucas silvaAinda não há avaliações
- Notebook Lenovo ThinkPad T440 I5-4300u 35,6 CM (1Documento1 páginaNotebook Lenovo ThinkPad T440 I5-4300u 35,6 CM (1Joelio MouraAinda não há avaliações
- Definição e classificação de matrizesDocumento59 páginasDefinição e classificação de matrizesThiago SousaAinda não há avaliações
- Unidade 3.2 - ControlnetDocumento23 páginasUnidade 3.2 - Controlnetedmar2emanoellAinda não há avaliações
- GRUBDocumento4 páginasGRUBNélio Dos SantosAinda não há avaliações
- Curso RDocumento39 páginasCurso REneas VazAinda não há avaliações
- Editor Relatórios Avançados 8.5.3.0 R2 instalaçãoDocumento4 páginasEditor Relatórios Avançados 8.5.3.0 R2 instalaçãojo9182joAinda não há avaliações
- Avaliação Pesquisa - Autocad - 2DDocumento2 páginasAvaliação Pesquisa - Autocad - 2DJoão Victor PazAinda não há avaliações
- Guia de Atualização Ponto Atecsoft 3.0.0 Portaria MTP 671Documento7 páginasGuia de Atualização Ponto Atecsoft 3.0.0 Portaria MTP 671Júnio VieiraAinda não há avaliações
- 10 Anexos Aeronáutica Concurso PDFDocumento26 páginas10 Anexos Aeronáutica Concurso PDFFernando Henrique MariottoAinda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- JavaScript: Um Guia para Aprender a Linguagem de Programação JavaScriptNo EverandJavaScript: Um Guia para Aprender a Linguagem de Programação JavaScriptNota: 4.5 de 5 estrelas4.5/5 (4)
- Fundamentos de Cinemática e Dinâmica de MecanismosNo EverandFundamentos de Cinemática e Dinâmica de MecanismosAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- A Aprendizagem Cooperativa no Ensino da MatemáticaNo EverandA Aprendizagem Cooperativa no Ensino da MatemáticaNota: 5 de 5 estrelas5/5 (1)
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Orientação a Objetos: Aprenda seus conceitos e suas aplicabilidades de forma efetivaNo EverandOrientação a Objetos: Aprenda seus conceitos e suas aplicabilidades de forma efetivaNota: 5 de 5 estrelas5/5 (3)
- Princípios Químicos De Manipulação: Perfumaria, Limpeza E AfinsNo EverandPrincípios Químicos De Manipulação: Perfumaria, Limpeza E AfinsAinda não há avaliações
- Redes De Computadores DescomplicadasNo EverandRedes De Computadores DescomplicadasAinda não há avaliações