Escolar Documentos
Profissional Documentos
Cultura Documentos
Capitulo12 Trabalho de Deformacao 2022
Enviado por
rockxanno2016Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Capitulo12 Trabalho de Deformacao 2022
Enviado por
rockxanno2016Direitos autorais:
Formatos disponíveis
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Capı́tulo 12 - Trabalho de Deformação
A utilização do conceito de trabalho para solução de problemas da Mecânica é anterior ao
estabelecimento das leis de Newton. As primeiras ideias e iniciativas neste sentido apontam
para a Grécia antiga, passando por Leonardo Da Vinci e Bernoulli.
Os métodos de análise da Mecânica, grosso modo, podem ser classificados em diferenciais
e integrais. Os primeiros partem de equações diferenciais de equilı́brio e compatibilidade
definidos sobre um volume diferencial arbitrário. Os métodos integrais partem da integração
de equações que expressam conservação da energia definidas num volume finito e discreto.
Na Mecânica Estrutural, evidentemente, também se tem ambos tipos de métodos. Por
exemplo, a teoria da elasticidade parte de equações de equilı́brio diferenciais e compatibilidade
estabelecidas no entorno de um ponto, em função de tensões e deformações. A Resistência
dos Materiais parte de equações análogas a partir de uma seção transversal e dos esforços
internos e deslocamentos atuantes.
Neste capı́tulo serão tratados métodos de soluções de problemas tendo como fundamento
o conceito de trabalho no contexto do processo das deformações elásticas de modo tratar da
rigidez estrutural.
O conceito de energia é fundamental na fı́sica. Em todo sistema fı́sico atuam forças que
podem se deslocar e quando isto ocorre se pode associar uma capacidade de realizar trabalho.
Assim, se pode definir energia de forma simples como a capacidade de produzir trabalho.
A energia pode se manifestar de diversas formas, dependendo da natureza do sistema
fı́sico considerado e das forças presentes. Assim, se fala em energia mecânica, energia térmica,
energia elétrica, etc., cada um destes termos se refere a uma certa capacidade de liberar forças
e produzir trabalho.
As forças de um sistema realizam trabalho, enquanto o sistema armazena energia. Por
outro lado, a lei da conservação da energia estabelece que em um sistema isolado, a energia
não se cria nem é destruı́da, mas pode se transformar num outro tipo. Portanto, para que num
sistema isolado seja realizado trabalho parte da energia do sistema deve mudar de forma. Como
consequência, para se conhecer a quantidade de trabalho realizado num processo fı́sico basta
conhecer a variação da energia que ocorreu durante o processo. Como apenas as variações
são relevantes, o valor de referência a partir do qual se mede a energia pode ser estabelecido
arbitrariamente.
Feitas estas considerações, neste capı́tulo será abordado o trabalho/energia no âmbito do
processo de deformação elástica de um sistema mecânico, que basicamente estará constituı́do
por um sólido (corpo) elástico-linear sujeito a ação de um sistema exterior de forças em
equilı́brio. É bom lembrar que este sólido na realidade é uma estrutura ou um elemento
estrutural admitido elástico-linear, ou seja, se comporta como preconizado pela Lei de Hooke
com pequenas deformações e constituı́do por um material admitido contı́nuo, homogêneo e
isotrópico.
Assim, aqui será tratado o denominado trabalho de deformação e a denominada energia
elástica.
Resistência dos Materiais - Turma A 315 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
12.1 Processo de Deformação e Sistema Conservativo
Do exposto, se pode afirmar que um sólido elástico quando sujeito a um sistema externo
de forças irá se deformar. De modo que, estas forças realizarão trabalho sobre o sólido que
é denominado de trabalho de deformação. O corpo sólido, por sua vez, irá acumular este
trabalho realizado sobre ele na forma da denominada energia elástica.
Durante um processo de deformação em que forças realizam trabalho que decorre dos
deslocamentos de seus pontos de aplicação (originados pelas deformações) é possı́vel que
aconteça dissipação de energia.
É importante identificar esta situação, pois se não houver dissipação de energia, se pode
afirmar que o sistema é conservativo. O tratamento de sistemas conservativos do ponto de
vista energético é bem mais simples, e esta possibilidade é extremamente interessante. Basta
lembrar que sistemas conservativos dependem exclusivamente dos seus estados inicial e final
e não dependem das situações intermediárias pelas quais passou.
Cabe aqui ressaltar que no âmbito do processo de deformação elástica, o estado inicial é
normalmente a situação do sólido indeformado e o estado final é o sólido deformado na sua
configuração final.
As causas de dissipação de energia num processo de deformação elástica seriam:
a) Dissipação de energia na forma de energia cinética. Há energia cinética envolvida
num dado processo quando este envolve movimento e portanto velocidade. O sólido está em
repouso e indeformado no estado inicial . As forças externas atuam e provocam deformação
elástica, portanto seus pontos materiais saem do repouso adquirem velocidade até a posição
deformada do estado final. Há, portanto, uma parcela que será dissipada na forma de energia
cinética.
b) Dissipação de energia para vencer o atrito nos vı́nculos.
c) Dissipação de energia devido ao atrito interno visto que os materiais não apresentam
estrutura cristalina perfeita.
d) Dissipação de energia de outras formas, que não são do interesse da mecânica dos
sólidos deformáveis dentre elas a dissipação na forma de energia térmica.
Assim, se forem estabelecidas algumas hipótese sobre o sistema, este poderá ser admitido
conservativo. Tais hipótese são, admitir que não há atrito nos vı́nculos, admitir que a estrutura
cristalina dos materiais é perfeita e finalmente admitir que as forças externas são carregadas
lentamente de zero até seus valores finais, denominado de carregamento estático. Nesta
situação a dissipação de energia na forma de energia cinética será extremamente pequena, de
tal sorte que se poderá admitir com bastante precisão que o sistema de deformação elástica é
um processo conservativo.
Daqui para frente todo sistema elástico será admitido conservativo, portanto, como afir-
mado anteriormente, somente dependerá de seus estados inicial e final, e não dependerá por
quais situações intermediárias o sistema passou.
Evidentemente, quando se consideram tais hipóteses se está cometendo um erro de apro-
ximação. mas este erro será extremamente pequeno e não trará prejuı́zo nenhum as análises
Resistência dos Materiais - Turma A 316 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
que seguem. A figura 1 mostra esquematicamente o processo de deformação com seus estados
inicial e final.
Figura 1: Sistema conservativo
Sendo conservativo o sistema se pode afirmar que
W =U (1)
Nesta expressão a letra maiúscula W representa o trabalho externo de deformação e a
letra maiúscula U representa a energia elástica acumulada.
12.2 Energia Elástica
O trabalho de deformação realizado pelas forças externas sobre um sólido, será integral-
mente acumulado pelo sólido na forma de energia elástica.
Uma expressão que permita avaliar esta energia U , evidentemente, será função das tensões
e deformações que são entes mecânicos internos.
Antes da dedução desta expressão será analisado um pequeno mas importantı́ssimo aspecto
decorrente da hipótese de que os valores das forças crescem lentamente de zero a seus valores
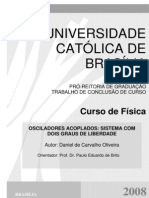
finais. A figura 2 mostra um gráfico força versus deslocamento do ponto de aplicação de uma
força P .
Se observa que a força P cresce a partir de 0 assim como o deslocamento x. De modo
que o trabalho W realizado por esta força até o valor do deslocamento atingir x1 será dado
por
∫ x1
W = P dx (2)
0
ou seja, o valor do trabalho é o valor da área abaixo da curva.
Resistência dos Materiais - Turma A 317 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Figura 2: Definição de trabalho
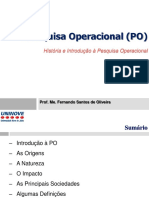
No caso de deformação elástica linear, a curva necessariamente será uma reta como repre-
sentado na figura 3.
Figura 3: Definição de trabalho
Deste modo, a área abaixo da curva é um triângulo, e se pode escrever
1
W = P x1 (3)
2
Se observa que a frente da expressão aparece a constante 21 . Esta decorre exclusivamente
da hipótese que as forças crescem lentamente de zero até seus valores finais. De modo que,
toda expressão de trabalho de deformação ou energia elástica trará esta constante 12 .
Se pode agora passar a dedução da expressão que permitirá determinar o valor da energia
elástica.
A figura 4 mostra um estado simples de tensões num ponto no interior de um sólido
elástico.
A força interna correspondente a tensão σx é dada por σx dy dz. O deslocamento deste
ponto na direção x desta força é dado por ϵx dx. De modo que se pode escrever
1 1 1
dU = σx dy dz ϵx dx = σx ϵx dx dy dz = σx ϵx dV (4)
2 2 2
1
dU == σx ϵx dV (5)
2
Resistência dos Materiais - Turma A 318 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Figura 4: Ponto sujeito a um estado simples de tensões
A figura 5 mostra um estado de cisalhamento puro num ponto no interior de um sólido
elástico.
Figura 5: Ponto sujeito a um estado de cisalhamento puro
A força interna correspondente a tensão τxy é dada por τxy dx dz. O deslocamento deste
ponto na direção x desta força é dado por γxy dy. De modo que se pode escrever
1 1 1
dU = τxy dx dz γxy dx = τxy γxy dx dy dz = τxy γxy dV (6)
2 2 2
1
dU = τxy γxy dV (7)
2
Generalizando para um estado geral de tensões com componentes normais σx , σy , σz e
componentes tangenciais τxy , τyz , τzx , se obtém
1
dU = (σx ϵx + σy ϵy + σz ϵz + τxy γxy + τyz γyz + τzx γzx ) dV (8)
2
Integrando no volume se obtém
∫ ∫
1
U= dU = (σx ϵx + σy ϵy + σz ϵz + τxy γxy + τyz γyz + τzx γzx ) dV (9)
V 2 V
com dx dy dz = dV .
Inserindo as expressões da Lei de Hooke deduzidas e apresentadas no Capı́tulo 3 página
67, numeradas de (50) a (55) se obtém
∫ [ 2 ]
1 σx σy2 σz2 2ν 2
τxy 2
τyz 2
τzx
U= + + − (σx σy + σy σz + σz σx ) + + + dV (10)
2 V E E E E 2G 2G 2G
Resistência dos Materiais - Turma A 319 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Quando o estado de tensões estiver representado pelas suas tensões principais σ1 , σ2 e σ3 ,
a expressão anterior toma a forma
∫
1 [ 2 ]
U= σ1 + σ22 + σ32 − 2ν (σ1 σ2 + σ2 σ3 + σ3 σ1 ) dV (11)
2E V
As expressões até aqui definidas, para determinação do valor da energia elástica não são
muito úteis para a mecânica estrutural. Entretanto, a partir destas expressões se pode deter-
minar outra expressão que permite determinar o valor de U como função dos esforços internos.
Para o caso de tensão normal uniaxial a expressão anterior se reduz a
∫
σ2
U= dV (12)
V 2E
N
Para o caso de força normal N , se sabe que σ = . Inserindo este valor em (12) se obtém
A
∫ ∫ ∫
N2 N2 N2
U= dV = dA dx = dx (13)
V 2EA2 V 2EA2 L 2EA
M
Para o caso de flexão M , se sabe que σ = y. Inserindo este valor em (12) se obtém
I
∫ ∫ ∫
M2 2 M2 2 M2
U= 2
y dV = 2
y dA dx = dx (14)
V 2EI V 2EI L 2EI
Para o caso de cisalhamento puro a expressão anterior se reduz a
∫
τ2
U= dV (15)
V 2G
T
Para o caso da torção T , se sabe que τ =
ρ. Inserindo este valor em (15) se obtém
J
∫ ∫ ∫
T2 2 T2 2 T2
U= 2
ρ dV = 2
ρ dA dx = dx (16)
V 2GJ V 2GJ L 2GJ
VQ
Finalmente, para o caso de força cortante V , se sabe que τ = . Inserindo esta
It
expressão em (15) se obtém
∫
V 2 Q2
U= 2 2
dV (17)
V 2GI t
Mas da geometria de superfı́cies planas vem
I
i2 = I = i2 A I 2 = i4 A2 (18)
A
Resistência dos Materiais - Turma A 320 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Levando este valor em (17)
∫ ∫ ∫ ∫ ∫
V 2 Q2 V2 Q2 1 Q2 V2
U= 4 2 2
dV = dx 4 2
dA = dA dx (19)
V 2Gi A t L 2GA A i At i4 A A t2 L 2GA
O termo que precede a última integral é puramente geométrico e seu valor depende ex-
clusivamente da forma geométrica da seção transversal. É denominado de fator de corte ou
fator de cisalhamento sendo representado pela letra grega χ. Assim,
∫
V2
U =χ (20)
L 2GA
onde
∫
1 Q2
χ= 4 dA (21)
i A A t2
Para seções retangulares χ = 1, 2 e para seções transversais circulares χ = 1, 1.
Quando se tem a presença dos quatro esforços internos atuando concomitantemente, a
expressão de U será dada pela soma das expressões (13), (14), (16) e (20) tomando a forma
∫ ∫ ∫ ∫
N2 M2 T2 V2
U= dx + dx + dx + χ dx (22)
L 2EA L 2EI L 2GJ L 2GA
Obtida esta expressão para a energia elástica, se pode fazer algumas considerações muito
importantes.
Esta expressão mostra que a dependência entre energia elástica (ou trabalho de de-
formação) em relação aos esforços não é linear, mas quadrática. Este fato impede que seja
aplicado o princı́pio da superposição dos efeitos quando se lida com trabalho/energia em
processos de deformação elástica.
Para o caso de treliças planas e espaciais, se tem apenas forças normais. De modo que, a
expressão de U se resuma a
∫
N2
U= dx (23)
L 2EA
Além disso, como uma treliça está constituı́da por n barras, a expressão anterior deve ser
aplicada a cada barra. Mas em treliças, o valor da força normal é constante ao longo de cada
barra, de modo que a expressão pode ser escrita numa forma mais apropriada como
∑n
Ni2 Li
U= (24)
i=1
2EAi
Para o caso de vigas sujeitas a momento de flexão e força cortante a expressão de U se
simplifica para
∫ ∫
M2 V2
U= dx + χ dx (25)
L 2EI L 2GA
Resistência dos Materiais - Turma A 321 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Entretanto, a parcela da força cortante é em geral muito pequena comparada a da flexão.
É comum desprezá-la. Deste modo, para vigas se irá considerar apenas a flexão, assim
∫
M2
U= dx (26)
L 2EI
Para pórticos planos não se tem apenas torção, logo a expressão para U se simplifica para
∫ ∫ ∫
N2 M2 V2
U= dx + dx + χ dx (27)
L 2EA L 2EI L 2GA
Entretanto, as parcelas devidas a força normal e força cortante em geral são muito pequenas
comparadas a flexão de modo que se irá considerar apenas a flexão como em vigas.
∫
M2
U= dx (28)
L 2EI
Para o caso de grelhas não há força normal, logo a expressão de U se simplifica para
∫ ∫ ∫
M2 T2 V2
U= dx + dx + χ dx (29)
L 2EI L 2GJ L 2GA
Também aqui se irá desprezar a influência da força cortante, de modo que se usará a
expressão
∫ ∫
M2 T2
U= dx + dx (30)
L 2EI L 2GJ
De todas as expressões anteriormente citadas para o cálculo do valor de U se pode observar
que será sempre necessário conhecer a expressão de variação dos esforços internos e integrá-las
ao longo do comprimentos da barra divididas pela correspondente rigidez.
A expressão geral (22) pode ser rearranjada na forma
∫ ∫ ∫ ∫
1 N dx 1 M dx 1 T dx 1 V dx
U= N + M + T + Vχ (31)
L 2 EA L 2 EI L 2 GJ L 2 GA
Esta expressão é idêntica a expressão (22), apenas seus termos foram rearranjados. Cada
1
integrando está numa forma idêntica a expressão (3). Cada um deles vale a constante que
2
multiplica o valor da ação pelo o valor do deslocamento correspondente na forma infinitesimal.
O último termo do segundo membro s trata de uma expressão que permite calcular o valor
do deslocamento transversal devido a força cortante,
∫
V dx
v=χ (32)
L GA
Este seria o valor da flecha devida a força cortante. Este valor é normalmente
desprezado por ser muito menor do que a flecha produzida pela flexão.
12.3 Energia Elástica de Dilatação e de Distorção
Resistência dos Materiais - Turma A 322 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Na seção anterior foram obtidas as expressões (8) e (22) que são diferentes formas integrais
para a determinação da energia elástica acumulada num processo de deformação. A primeira
é função dos campos de tensões e deformações. A segunda é função dos esforços internos e
seus correspondentes deslocamentos.
Se define densidade de energia elástica representada por u, o valor desta por unidade de
volume. De modo que, a expressão que segue mostra esta definição.
U
u= (33)
V
E tendo como referência a expressão (9), se pode escrever
1
u= (σx ϵx + σy ϵy + σz ϵz + τxy γxy + τyz γyz + τzx γzx ) (34)
2
Levando as expressões da lei de Hooke nesta expressão se obtém
[ ]
1 σx2 σy2 σz2 2ν 2
τxy 2
τyz 2
τzx
u= + + − (σx σy + σy σz + σz σx ) + + + (35)
2 E E E E G G G
E em função das tensões principais no ponto, a expressão toma a forma
1 [ 2 ]
u= σ1 + σ22 + σ32 − 2ν (σ1 σ2 + σ2 σ3 + σ3 σ1 ) (36)
2E
As expressões (11) e (36) tratam da mesma energia elástica. A primeira no sólido e a
segunda em um ponto deste. A primeira envolve integração que em última análise significa
somar a energia elástica em cada ponto que constituı́ este sólido.
A figura 6 mostra um estado geral de tensões representado pelas seus valores principais.
Este é decomposto em dois estados de tensões também representados por tensões principais
cujos valores são escolhidos de forma conveniente.
Figura 6: Decomposição do estado de tensões
No primeiro estado de tensões desta decomposição os valores principais são iguais e valem
σ1 + σ2 + σ3
σ= (37)
3
Deste modo, valem a média das três tensões principais. O segundo estado componente
apresenta valores principais iguais a σ1 − σ, σ2 − σ e σ3 − σ.
Resistência dos Materiais - Turma A 323 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
A energia elástica para o estado dado será a soma das energias elásticas correspondentes
aos dois estados componentes.
Para o primeiro estado componente a energia elástica pode ser obtida da expressão (36)
fazendo (σ1 = σ), (σ2 = σ) e σ3 = σ. Esta parcela é conhecida como energia de dilatação.
Ela é a energia envolvida na variação de volume do sólido.
1 [ 2 ]
udilatacao = 3 σ − 6 ν σ2 (38)
2E
3 (1 − 2ν) 2 (1 − 2ν)
udilatacao = σ = (σ1 + σ2 + σ3 )2 (39)
2E 6E
Se pode observar que sendo as tensões principais do primeiro estado de tensões da de-
composição, idênticas de valor igual a σ, o correspondente cı́rculo de Mohr se degenerá a um
ponto de modo que para qualquer inclinação não se terá componentes tangenciais. Portanto,
não ocorrerá mudança de forma apenas variação de volume.
Para obtenção da parcela de energia de distorção se pode fazer
udistorcao = u − udilatacao (40)
ou seja
1 [ 2 ]
udistorcao = 3(σ1 + σ22 + σ32 ) − 6ν (σ1 σ2 + σ2 σ3 + σ3 σ1 ) − (1 − 2ν)(σ1 + σ2 + σ3 )2
6E
(41)
Expandindo o último termo no segundo membro que está elevado ao quadrado, e rearran-
jando o resultado se obtém
1+ν [ 2 ]
udistorcao = (σ1 − 2σ1 σ2 + σ22 ) + (σ22 − 2σ2 σ3 + +σ32 ) + (σ32 − 2σ3 σ1 + σ12 ) (42)
6E
Mas cada termo entre parêntese é um quadrado perfeito, vem
1+ν [ ]
udistorcao = (σ1 − σ2 )2 + (σ2 − σ3 )2 + (σ3 − σ1 )2 (43)
6E
Mas, E = 2 (1 + ν) G, então
1 [ ]
udistorcao = (σ1 − σ2 )2 + (σ2 − σ3 )2 + (σ3 − σ1 )2 (44)
12G
Caso se tenha um estado plano de tensões, onde σ3 = 0, a expressão anterior tomará a
forma
1 2
udistorcao = (σ − σ1 σ2 + σ32 ) (45)
6G 1
Resistência dos Materiais - Turma A 324 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Esta parcela de energia elástica é conhecida como energia de distorção. É a parcela
envolvida na mudança de forma do sólido.
As expressões (44) e (45) foram utilizadas por von Mises quando estabeleceu seu critério
de escoamento, a já abordada Teoria da Máxima Energia de Distorção.
12.4 Exemplos Resolvidos
12.4.1 Exemplo 1
Um tubo de alumı́nio com comprimento de 762 mm e seção transversal de área de 1194 mm2
é soldado a um suporte fixo A e a uma tampa rı́gida B. A barra de aço EF , de 19, 1 mm
de diâmetro, é soldada à tampa B. Isto é mostrado na figura 7. Sabendo que o módulo de
elasticidade é de 200 GP a para o aço e 74 GP a para o alumı́nio, determine o valor da energia
de deformação total neste sistema para P = 44, 5 kN .
Figura 7: Exemplo 3
Solução
Para esta situação, a barra de aço estará sujeita a uma força normal de tração igual a P .
O tubo de alumı́nio estará sujeito a uma força normal de compressão igual a P . deste modo,
o valor da energia elástica será dada pela soma
U = Ubarra + Utubo
ou seja,
2 2
Ntubo Ltubo Nbarra Lbarra
U= +
2 EAl Atubo 2 Eaço Abarra
As áreas transversais valem
Atubo = 1194 mm2 = 1194 ×−6 m2
π × 19, 12
Abarra = = 287 mm2 = 287 × 10−6 m2
4
Os comprimentos da barra e do tubo são mostrados na figura e o enunciado fornece os
valores dos módulos de elasticidade. Assim,
44, 52 × 0, 762 44, 52 × 1, 219
U= + = 0, 0296 kN.m
2 × 74 × 106 × 1194 × 10−6 2 × 200 × 106 × 287 × 10−6
Resistência dos Materiais - Turma A 325 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
U = 0, 0296 kN.m = 29, 6N.m = 29, 6 J
12.4.2 Exemplo 2
Considere a treliça carregada como mostra a figura 8. Suas barras são do mesmo material
e apresentam idêntica área transversal A. Determine o valor da energia elástica acumulada
por esta estrutura devido a ação da força P .
Figura 8: Exemplo 2
Solução
Como se trata de uma treliça, para a determinação da energia elástica acumulada deverá
ser empregada a expressão (24) abaixo reproduzida.
∑n
Ni2 Li
U=
i=1
2EA
Como são três barras, fazendo a adequação necessária se obtém
2 2 2
NCB LCB NDC LDC NDB LDB
U= + +
2EA 2EA 2EA
A estratégia para determinar os valores das três forças normais será determinação da reação
horizontal em D, solução por equilı́brio do nó D e finalmente o mesmo para o nó C. Antes
disso, serão determinados os comprimentos das três barras.
LCB = l
l
LDC = = 2l
cos 60o
Resistência dos Materiais - Turma A 326 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
√
LDB = LDC × cos 30o = l 3
√
∑ √ P 3
MB = 0 RDx × l 3 − P l = 0 RDx =
3
Equilı́brio do nó D
√
∑ 2P 3
Fx = 0 RDx + NDC × cos 60o = 0 NDC =−
3
∑
Fy = 0 NDC × cos 30o + NDB = 0 NDB = P
Equilı́brio do nó C
√
∑ P 3
Fx = 0 NCB − NDC × cos 60 = 0
o
NCB =
3
Levando todos estes valore na expressão de U , se obtém
( √ )2 ( √ )2
P 3 2P 3
l − 2l √
3 3 P2 l 3
U= + + =
2EA 2EA 2EA
√
P2 l 8P2 l P2 l 3 P2 l √
= + + = (1 + 8 + 3 3) =
6 EA 6 EA 2EA 6 EA
P2 l √ P2 l
= (9 + 3 3) = 2, 37
6 EA EA
12.4.3 Exemplo 3
Calcule o valor da energia acumulada pela viga mostrada na figura 9, devido exclusivamente
à flexão. Considere a rigidez à flexão EI constante.
Figura 9: Exemplo 3
Solução
Como se trata de uma viga e apenas os efeitos da flexão devem ser considerados, a
expressão a ser considerada para o cálculo da energia elástica é a (26) abaixo reproduzida.
∫
M2
U= dx
L 2EI
Resistência dos Materiais - Turma A 327 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Deste modo, será necessário determinar as expressões de variação dos momentos para os
trechos AD e BD. Para tanto se irá em primeiro lugar determinar os valores das reações.
∑ Mo
MB = 0 RAy × L + Mo = 0 RAy = −
L
∑ Mo
Fy = 0 RAy + RBy = 0 RBy = −RAy =
L
As equações de momento para os trechos AD e BD são
Mo
MAD = − x 0≤x≤a
L
Mo
MBD = x b≥x≥0
L
Levando estas expressões na expressão de U resulta
1 ∫ a Mo2 2 1 ∫ b Mo2 2
U= x dx + x dx =
2EI 0 L2 2EI 0 L2
( 2 3 )a ( 2 3 )b
1 Mo x 1 Mo x Mo2 (a3 + b3 )
= + =
2EI L2 3 0 2EI L2 3 0 6 EIL2
12.4.4 Exemplo 4
A barra AC, mostrada na figura 10, é construı́da em alumı́nio e está submetida a um
torque T aplicado em C. Sabendo que G = 73 GP a e que a parte BC da barra é vazada
e tem um diâmetro interno de 16 mm, determine a energia de deformação elástica que será
armazenada por esta barra para uma tensão de cisalhamento máxima de 120 M P a.
Figura 10: Exemplo 4
Solução
Para determinar a energia elástica acumula por esta barra, é necessário, em primeiro lugar,
determinar o valor para o torque T . Este está limitado pelo valor da tensão tangencial. Se
pode reparar que o diâmetro externo do eixo é constante de valor igual a 24 mm. O trecho
Resistência dos Materiais - Turma A 328 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
CB tem um furo portanto com menor inércia polar do que o trecho AB. Logo, a geometria
do trecho CB irá limitar o valor do torque T . Sendo assim, se pode escrever
π(244 − 164 )
JBC = = 26138 mm4 = 26138 × 10−12 m4
32
T × 0, 012
= 120 × 103 T = 0, 261 kN m
26138 × 10−12
O valor da inércia polar para o trecho AB vale
π 244
JAB = = 32572 mm4 = 32572 × 10−12 m4
32
Tomando a expressão
∫
T 2 dx
U=
L 2GJ
e a adequando a esta situação, vem
2
TAB 2
LAB TBC × LBC
U= +
2 GJAB 2 GJBC
Levando os valor conhecidos nesta expressão, se obtém
0, 2612 × 0, 400 0, 2612 × 0, 500
U= + =
2 × 73 × 106 × 32572 × 10−12 2 × 73 × 106 × 26138 × 10−12
= 0, 00573 + 0, 00893 = 0, 01466 KN m = 14, 66 N m = 14, 66 J
12.4.5 Exemplo 5
Considere a viga engastada-livre mostrada na figura 11. Esta apresenta seção transversal
retangular de dimensões b × h. Mostre que a influência da força cortante no valor da flecha
máxima é pequena o suficiente para ser desprezada. Admita uma relação E/G = 2, 5.
Figura 11: Exemplo 5
Solução
Na página 322 foi apresentada a expressão (32) que permite calcular a flecha devida a
força cortante. Tal expressão é abaixo reproduzida.
∫
V dx
v=χ
L GA
Resistência dos Materiais - Turma A 329 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Para esta viga, a flecha máxima ocorre na extremidade livre (devido exclusivamente aos
efeitos da flexão) e vale
P L3
vmax =
3 EI
O valor acima foi determinado no Exemplo 2 do Capı́tulo 10, página 293.
Agora se vai determinar a contribuição da força cortante. A expressão para a força cortante
admitindo a origem em B é
V =P
De modo que
∫ L
P dx PL
vf c = χ =χ
0 GA GA
Assim, o valor da flecha máxima será dada pela soma das contribuições da flexão e da
força cortante.
P L3 PL
vmax = +χ
3 EI GA
Esta expressão pode ser colocada na forma
[ ]
P L3 P L 3 EI
vmax = 1+χ ×
3 EI GA P L3
Simplificando vem
[ ]
P L3 EI
vmax = 1 + 3χ
3 EI GA L2
bh3
Mas, para uma seção retangular χ = 1, 2, a relação E/G = 2, 5, I = e A = bh.
12
Levando estes valores na expressão anterior se obtém
bh3
P L3 3 × 1, 2 × 2, 5 ×
vmax = 1 + 12
3 EI bh × L 2
Simplificando mais uma vez resulta
[ ]
P L3 h2
vmax = 1 + 0, 75 2
3 EI L
h
Se pode observar que o resultado depende a razão . Para vigas o valor de L é sempre
L
bem maior do que o valor de h. Se admitirmos que L = 10 h, se obterá
P L3
vmax = [1 + 0, 0075]
3 EI
Resistência dos Materiais - Turma A 330 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Assim, se pode concluir que neste caso, a influência da força cortante em relação a da
flexão é de apenas 0, 75 %.
Tal resultado permite simplificar
P L3 P L3
vmax = [1 + 0, 0075] ∼
=
3 EI 3 EI
Deste modo, ficou provado que ao se desprezar a influência da força cortante, o erro que
se está cometendo é muito pequeno.
12.5 Teorema de Clapeyron
Nas seções anteriores foram abordadas algumas questões teóricas importantes. Abaixo são
resumidamente descritas.
- Foi abordado a dualidade trabalho/energia nos processos de deformação elástica.
- As hipóteses que permitem considerar o processo de deformação elástico como conser-
vativo.
- Por conta disso, o trabalho/energia nos processos de deformação elástica depende exclu-
sivamente dos seus estados inicial e final. Em outras palavras, não depende da forma como
um conjunto de forças externas são carregadas.
- Foram deduzidas expressões para a densidade de energia elástica e para a energia elástica.
Esta última em função dos esforços internos. A expressão é reproduzida abaixo.
∫ ∫ ∫ ∫
N2 M2 T2 V2
U= dx + dx + dx + χ dx (22)
L 2EA L 2EI L 2GJ L 2GA
- A hipótese de carregamento ser admitido lento, faz com que as expressões para o trabalho
de deformação e para a energia elástica estejam multiplicadas pela constante 1/2.
- Foram deduzidas expressões para a energia elástica de dilatação e energia elástica de dis-
torção em função das tensões principais em um ponto. Esta segunda expressão foi empregada
por von Mises ao estabelecer seu critério de escoamento.
Nesta seção e nas próximas será feita a dedução e apresentação de alguns teoremas sobre
trabalho de deformação que tem grande relevância na análise estrutural.
O denominado Teorema de Clapeyron é historicamente tido como formulado por Benoit
Paul Émile Clapeyron (1799 - 1864), fı́sico e engenheiro francês. Estabelece e formaliza uma
expressão para o cálculo do trabalho de deformação.
Seja um corpo elástico que será carregado por um sistema de n forças P que irão deformar
o corpo. O estado inicial é o corpo indeformado. O estado final é o corpo deformado pela
ação deste sistema de forças. A figura 1 mostrou os estados inicial e final.
O sistema é conservativo logo se pode admitir uma infinidades de diferentes formas de car-
regamento para as forças. Por conveniência, será admitida a seguinte forma de carregamento:
todas as forças irão ser carregadas lentamente e ao mesmo tempo, crescendo de zero até seus
valores finais proporcionalmente.
Resistência dos Materiais - Turma A 331 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Assim, se α é um número que varia na forma 0 ≤ α ≤ 1, então quando α = 0 se está no
estado inicial e quando α = 1 o estado final foi atingido.
Será admitido que se está num instante intermediário, ou seja, 0 < α < 1. Nesta situação,
as forças do sistema terão os valores αP1 , αP2 , · · · , αPk , · · · , αn Pn .
O corpo é elástico e se deforma segundo a Lei de Hooke. Assim, neste instante in-
termediário, os deslocamentos dos pontos de aplicação das forças do sistema terão valores
proporcionais entre si e iguais a αδ1 , αδ2 , . . ., αδk , . . ., αn δn . É bom observar que os desloca-
mentos dos pontos de aplicação das forças do sistema responsáveis pela execução de trabalho,
são suas componentes medidas nas direções das forças.
Agora se fixa atenção na força genérica Pk . Neste instante intermediário, tem valor αPk .
Caso seu valor seja admitido fixo e no instante seguinte (α + dα) seu ponto de aplicação
sofra um incremento passando de αδk para (α + dα)δk , qual será o valor do trabalho de
deformação realizado pela força αPk neste incremento de α ?
O valor deste trabalho será dado pelo produto da força pela variação no deslocamento.
dW = αPk δk dα (46)
Mas o sistema de forças está constituı́do por n forças. Logo, estendo este raciocı́nio para
todas forças do sistema se pode escrever
∑
k=n
dW = αPk δk dα (47)
k=1
Por fim, avaliando do estado inicial ao estado final, se pode escrever
∑
k=n ∫ 1
W = Pk δ k α dα (48)
k=1 0
ou seja,
1 ∑
n
W = Pk δ k (49)
2 1
A expressão (49) é a expressão que permite calcular o trabalho (externo) de deformação.
Se deve fazer a seguinte leitura: o valor do trabalho de deformação realizado por um sistema
de forças equilibrado que atua sobre um corpo elástico é igual a metade da soma dos produtos
de cada uma das forças pelos correspondentes valores dos deslocamentos de seus pontos de
aplicação medidos nas direções destas forças.
A expressão (49) também pode ser reescrita caso o sistema esteja constituı́do por momen-
tos. Neste caso tomaria a forma.
1 ∑
n
W = Mk ϕ k (50)
2 1
Resistência dos Materiais - Turma A 332 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
A expressão decorrente do teorema de Clapeyron para o cálculo do trabalho de deformação
(externo) é de grande importância teórica, entretanto tem pouca utilidade prática. Seu em-
prego implica que os deslocamentos dos pontos de aplicação das forças sejam conhecidos.
12.6 Trabalho Mútuo ou Indireto. Teorema de Betti
Antes da abordagem do teorema de Betti, será apresentado o que é trabalho de deformação
mútuo ou indireto.
Para ficar claro o que significa, será considerada uma viga biapoiada sujeita à ação de
duas forças concentradas. Poderia ser qualquer outro tipo de estrutura e outra quantidade
de forças. A escolha feita aqui, maximiza a compreensão e o entendimento do conceito de
trabalho mútuo ou indireto.
Sendo o sistema conservativo, se pode admitir diferentes formas de carregamento para as
duas forças, que serão denominadas de P1 e P2 .
A forma de carregamento escolhida é carregar em primeiro lugar a força P1 e a seguir a
força P2 . Será verificado o que acontece em termos de trabalho de deformação.
Carregando a força P1 , esta irá provocar flexão e força cortante ao longo da viga defor-
mando a mesma. Na figura 12 é mostrado esquematicamente o processo de deformação devido
a P1 .
Figura 12: Ação da força P1 - Estado inicial para intermediário
A força P1 irá executar um quantidade de trabalho de deformação, denominada aqui por
W1 , cujo valor será segundo Clapeyron
1
W1 = P1 v 1 (51)
2
Nesta expressão v1 representa o valor do deslocamento do ponto de aplicação de P1 que
em última análise é o valor da flecha que sofre a viga na posição de aplicação de P1 .
A figura 13 mostra o carregamento da viga pela segunda força, P2 , ou seja, a viga passa
do estado intermediário para o estado final.
O carregamento da viga pela força P2 também provocará força cortante e flexão na viga.
As deformações produzidas na viga por P2 não dependem do fato da viga já estar sujeita a
ação de P1 . Se está no regime elástico.
A força P2 irá executar um quantidade de trabalho de deformação, denominada aqui de
W2 , cujo valor será segundo Clapeyron
1
W2 = P2 v 2 (52)
2
Resistência dos Materiais - Turma A 333 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Figura 13: A ação da força P2 - Estado intermediário para final
Nesta expressão, v2 representa o valor do deslocamento do ponto de aplicação de P2 que
em última análise é o valor da flecha que sofre a viga na posição de aplicação de P2 .
Entretanto agora, há um fato adicional a considerar. Quando a força P2 for atuar, a força
P1 já está atuando. Caso, a força P2 provoque deslocamento adicional ao ponto de aplicação
de P1 , esta realizará uma segunda parcela de trabalho dada por
W1,2 = P1 v1,2 (53)
Nesta expressão o valor da flecha v1,2 é o valor do deslocamento do ponto de aplicação
da força P1 devido a ação posterior da força P2 . Aqui é bom observar que esta parcela de
trabalho de deformação não deve ser multiplicada pela constante 1/2 pois a força P1 já está
atuando.
Esta parcela de trabalho de deformação é denominada de trabalho mútuo ou
indireto. Em última análise, trabalho mútuo ou indireto é realizado por forças já
atuantes devido a ação posterior de uma ou mais forças.
Deste modo, o valor do trabalho de deformação realizado pelas duas forças sobre a viga é
W = W1 + W2 + W1,2 (54)
A parcela de trabalho mútuo ou indireto W1,2 pode ser nula, negativa ou positiva. Isto
dependerá do sistema de forças e da estrutura considerada.
Agora será feita análise da mesma situação mas com inversão na ordem de aplicação das
duas forças. Primeiro irá atuar a força P2 e a seguir a força P1 .
Quando a força P2 é aplicada, ela irá realizar uma parcela de trabalho de deformação dada
por
1
W2 = P2 v 2 (55)
2
A seguir, é aplicada a força P1 . Ela irá realizar uma segunda parcela de trabalho dada por
1
W1 = P1 v 1 (56)
2
Entretanto, quem irá agora realizar trabalho mútuo é a força P2 , pois já atua na viga. Esta
terceira parcela de trabalho de deformação será dada por
W2,1 = P2 v2,1 (57)
Resistência dos Materiais - Turma A 334 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
A quantidade total de trabalho de deformação realizada pelas duas forças sobre a viga é
W = W2 + W1 + W2,1 (58)
Mas para as duas formas de carregamento, os estados inicial e final são os mesmos, logo a
quantidade de trabalho de deformação realizada pelas duas forças será a mesma. Deste modo,
se pode igualar as quantidades dadas por (54) e (58).
W1 + W2 + W1,2 = W2 + W1 + W2,1 (59)
Simplificando resulta
W1,2 = W2,1 (60)
Esta é a conclusão do teorema de Betti. Independente da ordem de aplicação
das forças sobre um copro elástico, a quantidade de trabalho mútuo ou indireto
realizado será sempre a mesma. Na expressão (60), W1,2 é o valor do trabalho mútuo ou
indireto realizado pela força P1 devido a ação posterior de P2 , e W2,1 é o valor do trabalho
mútuo ou indireto realizado pela força P2 devido a ação posterior de P1 .
Este teorema se deve a Enrico Betti (1823 - 1892), matemático, professor e topólogo
italiano.
12.7 Teorema de Maxwell
Este teorema também é conhecido como teorema da Reciprocidade. Praticamente é uma
extensão do teorema de Betti.
Seja a viga biapoiada e as duas forças consideradas na seção anterior.
Se irá admitir, por conveniência que ambas sejam unitárias, ou seja, P1 = 1 e P2 = 1.
Se forem consideradas as expressões anteriores (53) e (57) e tendo em vista o teorema de
Betti se pode escrever
P1 v1,2 = P2 v2,1 (61)
ou seja
v1,2 = v2,1 (62)
Isto se denomina igualdade de deslocamentos recı́procos. Em última análise, o
deslocamento provocado na posição 1 por uma forca unitária que atua numa posição
2 é igual ao deslocamento provocado na posição 2 por uma força unitária que atua
na posição 1.
Por conta deste teorema, se pode afirmar que a matriz de rigidez e de flexibilidade de uma
estrutura são necessariamente matrizes simétricas.
Esta igualdade de deslocamentos recı́procos vale para dois momentos M1 = 1 e M2 = 1,
como também para uma força P1 = 1 e um momento M2 = 1. Abaixo as expressões que
representam estas duas situações.
ϕ1,2 = ϕ2,1 (63)
Resistência dos Materiais - Turma A 335 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
v1,2 = ϕ2,1 (64)
Na expressão (64) se afirma que um valor de flecha é igual a um valor de rotação. É isto
mesmo, mais esta igualdade é apenas quanto ao valor.
12.8 Teorema de Castigliano
Estabelecido por Carlo Alberto Castigliano(1847 - 1884), matemático, fı́sico e engenheiro
italiano.
Seja um corpo deformado elasticamente por um sistema de forças P1 , P2 , · · · , Pk ,
· · · , Pn .
Seja δk o deslocamento do ponto de aplicação da força Pk medido na sua direção decorrente
da deformação deste corpo elástico provocada pelo sistema de forças.
Admita-se que a força Pk sofra um incremento infinitesimal dPk , passando ao valor (Pk +
dPk ).
Para este incremento na força Pk , qual será o valor da variação no trabalho de deformação
no sistema ?
Antes de tudo, aqui se pode dar uma outra interpretação para a variação na intensidade da
força Pk . Se pode admitir, uma situação mecânica equivalente. Está sendo introduzida uma
nova força no sistema que tem a mesma direção, mesmo sentido e mesmo ponto de aplicação
que Pk com valor dPk .
Deste modo, pelo que já foi abordado na seção 12.6, a variação no valor do trabalho
será dada pela soma de duas parcelas. A primeira parcela de trabalho corresponderá ao valor
realizado pela força dPk . Segundo Clapeyron, vale
1
dWk = dPk dδk (65)
2
Nesta expressão dPk é o valor da força e dδk é o valor do deslocamento de seu ponto
de aplicação medido na sua direção. Este deslocamento, a exemplo da força, é de grandeza
infinitesimal.
A segunda parcela corresponde a parcela de trabalho mútuo ou indireto realizado pelas
forças do sistema P1 , P2 , · · · , Pk , · · · , Pn , que já estão atuando sobre o corpo devido a ação
posterior da força dPk . Esta parcela é de difı́cil avaliação. Mas, segundo o teorema de Betti,
seu valor é igual ao trabalho mútuo ou indireto que realizaria força dPk se já estivesse atuando
sobre o corpo devido a ação posterior do sistema de forças.
O sistema de forças P1 , P2 , · · · , Pk , · · · , Pn provoca um deslocamento igual a δk , assim
esta parcela de trabalho mútuo ou indireto vale
dWk,k = dPk δk (66)
Deste modo está respondida a arguição anterior. A variação do trabalho de deformação
vale
1
dW = dWk + dWk,k = dPk dδk + dPk δk (67)
2
Resistência dos Materiais - Turma A 336 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Observando o segundo membro da expressão acima, seu primeiro termo é um infinitésimo
de 2a . ordem e o segundo termo é um infinitésimo de 1a . ordem. O cálculo infinitesimal
permite desprezar os infinitésimos de ordem superior em relação aos de ordem mais baixa.
Assim, a expressão anterior pode ser simplificada para a forma
dW = dPk δk (68)
Reordenando a expressão se obtém
dW
= δk (69)
dPk
Esta é a expressão do teorema de Castigliano. A leitura que se deve fazer é
a seguinte: a derivada do trabalho de deformação em relação a uma das forças
atuantes dá como resultado o valor do deslocamento do ponto de aplicação desta
força medido na direção e sentido desta força.
Este teorema estabelece uma técnica poderosa para determinação de desloca-
mentos de translação e/ou rotação para qualquer tipo de estrutura.
Caso que deseje determinar deslocamentos de rotação, a operação de derivação deve ser
em relação a um momento externo atuante. A expressão de Castigliano neste caso, toma a
forma
dW
= ϕk (70)
dMk
Por fim, dois fatos a considerar. Primeiro, o sistema de forças poderá estar constituı́do
por mais de uma força, logo a derivação adequada nas expressões (69) e (70) é a derivação
parcial. E segundo, o sistema é conservativo e portanto é mais adequado utilizar a expressão
da energia elástica U . Deste modo, se terá
∂U
= δk (71)
∂Pk
∂U
= ϕk (72)
∂Mk
Mas a expressão da energia elástica U está mostrada em (22). Derivando parcialmente
aquela expressão se obtém
∫ ∫ ∫ ∫
∂U NN MM TT VV
δk = = dx + dx + dx + χ dx (73)
∂Pk L EA L 2EI L GJ L GA
Nesta expressão se tem
∂N ∂M ∂T ∂V
N= , M= , T = , V = , (74)
∂Pk ∂Pk ∂Pk ∂Pk
Para deslocamentos de rotação as expressões acima mudam muito pouco. Tornam-se
∫ ∫ ∫ ∫
∂U NN MM TT VV
ϕk = = dx + dx + dx + χ dx (75)
∂Mk L EA L 2EI L GJ L GA
Resistência dos Materiais - Turma A 337 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Nesta expressão se tem
∂N ∂M ∂T ∂V
N= , M= , T = , V = , (76)
∂Mk ∂Mk ∂Mk ∂Mk
Na realidade o matemático Carlo Castigliano estabeleceu os denominados de Primeiro e
Segundo Teoremas de Castigliano. Este que foi aqui apresentado é o Segundo Teorema de
Castigliano. O Primeiro tem pouco interesse prático na solução de problemas, apenas grande
valor teórico.
As expressões (73) e (75) são bem longas. Na aplicação destas, se pode fazer algumas
simplificações.
Para o caso de treliças planas e espaciais, se tem apenas forças normais, além disso, deslo-
camentos de rotação são irrelevantes. Deste modo, para aplicação do teorema de Castigliano
se deve empregar a expressão mostrada abaixo levando em conta que uma treliça pode ter n
barras e que os valores das forças normais são constantes ao longo de cada barra.
∂U ∑ Ni Nii=n
δk = = dx (77)
∂Pk i=1
EA
onde
∂Ni
Ni = , (78)
∂Pk
Para o caso de vigas e pórticos planos, os efeitos da força cortante são desprezados e
para pórticos em geral os efeitos das forças normais também. Deste modo, para aplicação do
teorema de Castigliano se deve empregar a expressão mostrada abaixo.
∫
∂U MM
δk = = dx (79)
∂Pk L EI
onde
∂M
M= , (80)
∂Pk
ou
∫
∂U MM
ϕk = = dx (81)
∂Mk L EI
com
∂M
M= , (82)
∂Mk
A expressão (79) permite calcular translações, e a (81), rotações.
Para o caso de grelhas, os efeitos da força cortante são desprezados, mas os da flexão e
torção devem ser considerados. Deste modo, para aplicação do teorema de Castigliano se deve
empregar a expressão mostrada abaixo.
∫ ∫
∂U MM TT
δk = = dx + dx (83)
∂Pk L EI L GJ
Resistência dos Materiais - Turma A 338 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
onde
∂M ∂T
M= , e T = , (84)
∂Pk ∂Pk
ou
∫ ∫
∂U MM TT
ϕk = = dx + dx (85)
∂Pk L EI L GJ
com
∂M ∂T
M= , e T = , (86)
∂Mk ∂Mk
A expressão (83) permite calcular translações e (85) rotações. Cuidado deve ser tomado
para não confundir rotações devido a flexão com as decorrentes da torção.
12.9 Exemplos resolvidos
12.9.1 Exemplo 1
Para a viga mostrada na figura abaixo, determine os valores da flecha e da rotação na
extremidade livre B. Considere esta viga com rigidez EI constante. Utilize o teorema de
Castigliano.
Figura 14: Exemplo 1
Solução
Para a determinação do valor da flecha que é o valor do deslocamento vertical em B se
deve derivar em relação a uma força que atue em B na direção vertical. Esta força existe. É
a força P . Deste modo, se pode escrever que
∫ L
∂U MM
vB = = dx
∂P 0 EI
onde
∂M
M=
∂P
A expressão de momento de flexão de B para A vale
MBA = −P x
Resistência dos Materiais - Turma A 339 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
de modo que
∂MAB
MAB = = −x
∂P
Assim,
∫ L
(−P x)(−x) P L3
vB = =
0 EI 3EI
Para a determinação do valor da rotação em B se deve derivar em relação a um momento
que atue em B. Este não existe. Há um impasse momentâneo. Para resolver esta situação,
em relação a quem derivar, se acrescentará um momento em B de modo a permitir a de-
rivação. Para não correr alteração nenhuma no sistema mecânico, este momento Mo deve ser
considerado com valor nulo.
A figura 16 mostra a nova situação da viga com o momento fictı́cio Mo = 0.
Figura 15: Acréscimo de um momento fictı́cio nulo
Agora se tem
∫ L
∂U MM
vB′ = = dx
∂Mo 0 EI
onde
∂M
M=
∂Mo
A expressão de momento de B para A é
MBA = −P x − Mo
de modo que
∂M
MAB = = −1
∂Mo
Agora se pode anular Mo , assim
∫ L
′ ∂U (−P x)(−1) P L2
vB = = dx =
∂Mo 0 EI 2EI
Resistência dos Materiais - Turma A 340 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Figura 16: Exemplo 2
12.9.2 Exemplo 2
Para a viga mostrada na figura 17, determine o valor da flecha na seção média. Considere
esta viga com rigidez EI constante. Utilize o teorema de Castigliano.
Solução
Na seção média não há uma força externa aplicada. Assim, se deve acrescentar uma força
fictı́cia dirigida para baixo.
Figura 17: Exemplo 2
Além disso, a viga com seu carregamento constituı́ um situação simétrica. Deste modo,
se poderá integrar do extremo ao meio do vão e multiplicar o resultado por 2.
A expressão de momento da esquerda ao meio do vão vale
( )
qL F qx2
MAC = + x−
2 2 2
de modo que
∂M AC x
M AC = =
∂F 2
Portanto,
∫ L/2 ( )( ) ∫ L/2 ( )
qL qx2 x dx qLx2 qx3 dx
vC = 2 × x− =2× − =
0 2 2 2 EI 0 4 4 EI
( )L/2 ( )
2 qLx3 qx4 1 qL4 qL4
vC = − = −
EI 12 16 0 EI 48 128
Resistência dos Materiais - Turma A 341 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
5qL4
vC =
384
12.9.3 Exemplo 3
Para a viga mostrada na figura 18, determine o valor da flecha na extremidade livre C.
Considere esta viga com rigidez EI constante. Utilize o teorema de Castigliano.
Figura 18: Exemplo 3
Solução
De imediato se observa que há duas forças com mesma identidade. São as forças P que
atuam em B e C.
Na aplicação do teorema de Castigliano para esta situação não se poderá derivar o trabalho
de deformação em relação a P . Isto porque não será obtido nem a flecha em B nem a flecha
em C.
Nos dois exemplos anteriores foi utilizado um artifı́cio que possibilitou a realização das
operações de derivação. O artifı́cio foi acrescentar uma força ou momento fictı́cio, nulos, para
se poder operar as derivações.
Aqui a situação é diferente pois se tem duas forças idênticas atuando em posições distintas.
O artifı́cio é, preliminarmente trocar o nome de uma destas forças. Realizar os cálculos
empregando o teorema de Castigliano. Obtido o valor do deslocamento procurado, se deve
fazer a operação inversa, a forca trocada de nome volta ao seu nome original.
Esclarecido o artifı́cio que deve ser empregado, será trocado o nome da força que atua em
C. Será denominada por F . Isto é mostrado na figura 19.
Figura 19: Troca de nome de uma força
Resistência dos Materiais - Turma A 342 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Deste modo, as equações de momentos são
MCB = −F x 0 ≤ x ≤ L/2
MBA = −F x − P (x − l/2) L/2 ≤ x ≤ L
Mas
∂U
vC =
∂F
MCB
= −x
∂F
MBA
= −x
∂F
Assim, a flecha em C vale
∫ L/2 ∫ L [ ( ) ]
dx L dx
vC = (−F x)(−x) + (−F x)(−x) − P x − (−x)
0 EI L/2 2 EI
∫ L/2 ∫ L [ ]
dx P Lx dx
vC = Fx + 2
Fx + Px −
2 2
0 EI L/2 2 EI
[ ]L/2 [ ]L [ ]L [ ]L
1 F x3 1 F x3 1 P x3 1 P Lx2
vC = + + −
EI 3 0 EI 3 L/2 EI 3 L/2 EI 4 L/2
F L3 F L3 F L3 P L3 P L3 P L3 P L3
vC = + − + − − +
24EI 3EI 24EI 3EI 24EI 4EI 16EI
3 3
FL 5P L
vC = +
3EI 48EI
Trocando F por P , resulta
P L3 5P L3 7P L3
vC = + =
3EI 48EI 16EI
12.9.4 Exemplo 4
Para a viga Gerber mostrada na figura 20, determine o valor, em graus, da rotação da
elástica em D. Considere esta viga com rigidez constante EI = 12000 kN m2 . Utilize o
teorema de Castigliano.
Figura 20: Exemplo 4
Resistência dos Materiais - Turma A 343 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Solução
Tendo em vista que se trata de uma viga Gerber, a primeira atitude é determinar o esquema
de apoio. É solicitado o valor da rotação em D. De modo que, se deve acrescentar ao sistema
um momento fictı́cio nulo em D para possibilitar as derivações do teorema de Castiliano. Tudo
isto é mostrado na figura 21.
Figura 21: Esquema de apoio/ momento fictı́cio
A aplicação do teorema de Castigliano implica em considerar os momentos provocados por
Mo . Estes acontecerão apenas no trecho CD. A força de valor 9 kN será denominada por
F e o comprimento de 4 m será denominado por a. Deste modo escrevendo a expressão da
direita para a esquerda se tem
MDC = −(F + Mo /4)x + Mo
Cuja derivada em relação a Mo vale
∂MDC
M DC = = −x/4 + 1
∂Mo
A rotação da elástica em D segundo Castigliano vale
∫ a ∫ a ∫ a( 2 )
′ dx dx Fx dx
vD = M DC M DC = (−F x)(−x/4 + 1) = − Fx
0 EI 0 EI 0 4 EI
[ ]4
′ F x3 F x2 64F 16F 8F
vD = − = − =−
12EI 2EI 0 12EI 2EI 3EI
′ 8×9
vD =− = −2 × 10−3 rad = −0, 11o
3 × 12000
O valor negativo encontrado para a rotação indica que ela tem sentido contrário ao sentido
arbitrado para Mo . Portanto, é uma rotação horária.
12.9.5 Exemplo 5
Resistência dos Materiais - Turma A 344 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Determine o valor do deslocamento horizontal do apoio D, em mm, no pórtico mostrado
na figura 22. Utilize o teorema de Castigliano. Calcule o valor solicitado considerando a flexão
e a seguir acrescente a influência da força normal. Considere as barras deste pórtico com
rigidez à flexão igual a 12000 kN m2 e rigidez axial EA = 300000 kN .
Figura 22: Exemplo 5
Solução
Para determinação do deslocamento solicitado é necessário acrescentar uma força fictı́cia
horizontal em D. Só assim poderão ser realizadas as derivações intrı́nsecas ao teorema de
Castigliano. A figura 23 mostra a inserção desta força fictı́cia que é denominada de F e
nula. A figura também mostra as reações que se tem para esta situação. Aqui será utilizado
H = 4 m, L = 5 m e q = 12 kN/m.
Figura 23: Solução estática do pórtico
a) Considerando apenas os efeitos da flexão
Da figura anterior se pode escrever
Resistência dos Materiais - Turma A 345 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
∂MAB
MAB = F y =y
∂F
∂MDC
MDC = F y =y
∂F
qL x2 ∂MBC
MBC = x− + FH =H
2 2 ∂F
de modo que
∫ L [ ] [ ]L
∂U qLx x2 dx H qLx2 x3 qL3 H
δBh = = − H = − =
∂F 0 2 2 EI EI 4 6 0 12EI
qL3 H 12 × 53 × 4
δBh = = = 0, 042 m = 42 mm
12EI 12 × 12000
b) Considerando também os efeitos da força normal
Estes deverão ser acrescentados ao efeito da flexão acima determinado. Deste modo, se
deve considerar a força normal atuante em cada uma das três barras.
Olhando para a figura 23, se pode escrever
qL ∂NAB
NAB = =0
2 ∂F
qL ∂NDC
NDC = =0
2 ∂F
∂MBC
NBC = F =1
∂F
A componente do deslocamento em D (influência) devido às forças normais é dada por
∫ ∫ ∫
h NAB N AB LAB NDC N DC LDC NBC N BC LBC
δD = dx + dx + dx
EI EI EI
Observando as expressões para as forças normais e suas derivadas se chega de imediato a
conclusão que a soma das integrais é NULA.
Se pode então concluir, neste caso especı́fico, o deslocamento horizontal de D não é
influenciado pelas forças normais atuantes.
12.9.6 Exemplo 6
A treliça mostrada na figura 24 tem suas barras construı́das com uma liga de alumı́nio.
As barras tem idêntica área transversal constituı́das por tubos de 50 mm de diâmetro externo
e parede de espessura igual a 4 mm. Para o carregamento indicado, determine o valor do
Resistência dos Materiais - Turma A 346 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
Figura 24: Exemplo 6
deslocamento vertical do nó C em mm. Considere EAl = 72 GP a. Usar o teorema de
Castigliano.
Solução
Antes de tudo, se irá calcular o valor da rigidez axial EA das barras.
π(502 − 422 )
A= = 578 mm2 = 587 × 10−6 m2
4
EA = 72 × 10−6 × 578 × 10−6 = 41616 kN
Para a aplicação do teorema de Castigliano, deveria haver uma força vertical atuando no
nó C. Está força não existe.
Assim, se irá utilizar o artifı́cio de acrescentar uma força fictı́cia em C de valor nulo. Esta
força será denominada por F . A figura 25 mostra a estrutura sujeita ao novo carregamento.
Se pode reparar que as barras foram numeradas para melhor determinação dos esforços
atuantes.
Figura 25: Carga fictı́cia F e numeração de barras
Segue a determinação dos valores dos esforços normais para as sete barras. Foi utilizado
o método dos nós (aqui não mostrado) que leva aos seguintes valores
Resistência dos Materiais - Turma A 347 Capı́tulo 11 - Trabalho de Deformação
Universidade Federal do Rio Grande - FURG 26/08/2022 Escola de Engenharia
N1 = 30
N2 = −1, 333F
N3 = −7, 5 + F
N4 = −37, 5 − 1, 667F
N5 = −F
N6 = 1, 667F
N7 = 30 + 1, 333F
O valor do deslocamento vertical em C será dado pela aplicação da expressão do teorema
de Castigliano válida para treliças e adequada a este caso.
∑
7
Ni Ni L i
δCv =
1
EA
onde
∂Ni
Ni =
∂F
Os valores de Ni valem
N1 = 0
N2 = −1, 333
N3 = 1
N4 = −1, 667
N5 = −1
N6 = 1, 667
N7 = 1, 333
Deste modo se tem
N3 N3 L 3 N4 N4 L 4 N7 N7 L 7
δCv = + + =
EA EA EA
−7, 5 × 1 × 1, 5 −37, 5 × −1, 667 × 2, 5 30 × 1, 333 × 2
= + + =
EA EA EA
11, 25 156, 28 80 225
= − + + =
EA EA EA EA
225
δCv = = 0, 0054 m = 5, 4 mm
41616
Rio Grande, 26 de agosto de 2022.
Prof. Ernesto Luiz Gomes Alquati
Escola de Engenharia
Resistência dos Materiais - Turma A 348 Capı́tulo 11 - Trabalho de Deformação
Você também pode gostar
- E MC 2Documento6 páginasE MC 2Samuel RibeiroAinda não há avaliações
- Relatividade RestritaDocumento135 páginasRelatividade RestritaupadorAinda não há avaliações
- Colisão e As Leis Da ConservaçãoDocumento13 páginasColisão e As Leis Da ConservaçãoKlayton SantosAinda não há avaliações
- CaliequeDocumento14 páginasCaliequeManolo BersoneAinda não há avaliações
- Deslocamentos em EstruturasDocumento33 páginasDeslocamentos em EstruturasEdson AlvesAinda não há avaliações
- Callen Cap1Documento8 páginasCallen Cap1Maria Vithória OliveiraAinda não há avaliações
- Fisica Basica 1-Livro-97-124Documento28 páginasFisica Basica 1-Livro-97-124Hesrom AftaelAinda não há avaliações
- GABARITO Simulado 5 - Resistência Dos Materiais (EPR02)Documento6 páginasGABARITO Simulado 5 - Resistência Dos Materiais (EPR02)Milto Cezar GomesAinda não há avaliações
- 11110927032012Introduà à o A Fisica Estatistica Aula 5Documento22 páginas11110927032012Introduà à o A Fisica Estatistica Aula 5Lane LopesAinda não há avaliações
- CAPÍTULO 4 Trabalho e CalorDocumento6 páginasCAPÍTULO 4 Trabalho e CalorGustavo De Lucca FloresAinda não há avaliações
- Semana 5Documento40 páginasSemana 5Nelson WalterAinda não há avaliações
- Relatório 5 - LAB BASICO I UFPADocumento18 páginasRelatório 5 - LAB BASICO I UFPARodrigo da SilvaAinda não há avaliações
- 2° Relatório de Física Exp IIDocumento20 páginas2° Relatório de Física Exp IIHigor DurãesAinda não há avaliações
- Trabalho Energia PDFDocumento12 páginasTrabalho Energia PDFDavid OliveiraAinda não há avaliações
- Aplicação Do Cálculo Diferencial e Integral No Estudo de Linhas Elásticas de Vigas IsostáticasDocumento21 páginasAplicação Do Cálculo Diferencial e Integral No Estudo de Linhas Elásticas de Vigas IsostáticasDaniel Saboia100% (1)
- Aula 09Documento10 páginasAula 09victorAinda não há avaliações
- Cap5 - MC Quarrie (Tradução)Documento24 páginasCap5 - MC Quarrie (Tradução)karinaAinda não há avaliações
- Laboratório de Fisica Geral II - Lei de Hooke - TrabalhoDocumento8 páginasLaboratório de Fisica Geral II - Lei de Hooke - TrabalhoMarcelo SantanaAinda não há avaliações
- Termodinâmica PDFDocumento59 páginasTermodinâmica PDFCristiane OliveiraAinda não há avaliações
- Metodos de EnergiaDocumento20 páginasMetodos de EnergiaGustavo MolinaAinda não há avaliações
- Teoria Das Estruturas 2Documento65 páginasTeoria Das Estruturas 2Gláucio Ribeiro0% (1)
- Campo ElétricoDocumento26 páginasCampo ElétricoMarcioAinda não há avaliações
- Capitulo 07Documento38 páginasCapitulo 07Christianne G. RodriguesAinda não há avaliações
- Ficha de Leitura 2.1Documento8 páginasFicha de Leitura 2.1João Luís MubangoAinda não há avaliações
- Análise Experimental de Tensões: 1. IntroduçãoDocumento106 páginasAnálise Experimental de Tensões: 1. IntroduçãoBruno DiasAinda não há avaliações
- Capitulo 07Documento38 páginasCapitulo 07Geovany Amador SoaresAinda não há avaliações
- Termodinamica Quimica Aula 8Documento17 páginasTermodinamica Quimica Aula 8Rafaela PradeAinda não há avaliações
- Listas P1 ConformaçãoDocumento70 páginasListas P1 ConformaçãoJadiel Oliveira0% (1)
- Curso 160731 Aula 12 EletrodinamicaDocumento38 páginasCurso 160731 Aula 12 Eletrodinamicaagsteoi HhAinda não há avaliações
- Princípio de BernoulliDocumento7 páginasPrincípio de BernoulliAllison RafaelAinda não há avaliações
- Relatorio1 f2Documento13 páginasRelatorio1 f2Moon LilAinda não há avaliações
- Dinamica - Sismica - Aníbal Costa PDFDocumento106 páginasDinamica - Sismica - Aníbal Costa PDFPablo BenitezAinda não há avaliações
- 06 Cap 6Documento35 páginas06 Cap 6vbdeantoniAinda não há avaliações
- Relatório de Oscilações MecânicasDocumento22 páginasRelatório de Oscilações MecânicasRicardo Henry100% (1)
- Capitulo13 Metodo Da Carga Unitaria 2022Documento14 páginasCapitulo13 Metodo Da Carga Unitaria 2022rockxanno2016Ainda não há avaliações
- Elli Eel1an MCB3Documento17 páginasElli Eel1an MCB3Otávio Cecon ComelliAinda não há avaliações
- Relatividade Especial (Rafael Ferraro)Documento28 páginasRelatividade Especial (Rafael Ferraro)DOUGLAS LOURINALDOAinda não há avaliações
- Taiz Apendices 1 OnLineDocumento22 páginasTaiz Apendices 1 OnLineElton De SáAinda não há avaliações
- Aplicação Do Segundo Teorema de Castigliano Na Solução de Estruturas HiperestaticasDocumento12 páginasAplicação Do Segundo Teorema de Castigliano Na Solução de Estruturas HiperestaticasRAYSSA FILGUEIRAS CALDASAinda não há avaliações
- Princípio de Funcionamento de FotocopiadorasDocumento30 páginasPrincípio de Funcionamento de FotocopiadorasSalisbury AlmeidaAinda não há avaliações
- Apostila Vigas 2018Documento131 páginasApostila Vigas 2018Nicolas Simoes FialhoAinda não há avaliações
- Balanço de Energia - Exemplos PráticosDocumento14 páginasBalanço de Energia - Exemplos PráticosNatalia SouzaAinda não há avaliações
- OPERAÇÕES UNITÁRIAS - Livro 2Documento12 páginasOPERAÇÕES UNITÁRIAS - Livro 2Aline AndradeAinda não há avaliações
- Capitulo 08 CallenDocumento15 páginasCapitulo 08 CallenRafaelawAinda não há avaliações
- FiSICA DINaMICA DO MHSDocumento5 páginasFiSICA DINaMICA DO MHSTheo SaleraAinda não há avaliações
- TFG - Osciladores Com Dois Graus de LiberdadeDocumento31 páginasTFG - Osciladores Com Dois Graus de LiberdadeFábio MáximoAinda não há avaliações
- Turmadefevereiro Fisica1 Lei - de - Ohm - Resistores - e - Potencia - Eletrica 30 06 2021 1Documento14 páginasTurmadefevereiro Fisica1 Lei - de - Ohm - Resistores - e - Potencia - Eletrica 30 06 2021 1LarissaAinda não há avaliações
- FIII 01 01 Eletromagnetismo Como Uma Teoria de ForçasDocumento3 páginasFIII 01 01 Eletromagnetismo Como Uma Teoria de ForçasJean CadastroAinda não há avaliações
- 1 - Resistência Dos MateriaisDocumento23 páginas1 - Resistência Dos MateriaisParth PrinceAinda não há avaliações
- Calor Como Energia HojeDocumento7 páginasCalor Como Energia Hojezeferino usseneAinda não há avaliações
- Euler LagrangeDocumento14 páginasEuler LagrangeuesleimpAinda não há avaliações
- ACIONAMENTOS ELÉTRICOS-mescladoDocumento187 páginasACIONAMENTOS ELÉTRICOS-mescladoRoberta Janaina Silva60% (5)
- Projeto 5Documento8 páginasProjeto 5esther.caparrozAinda não há avaliações
- Método Da Flexibilidade.0Documento30 páginasMétodo Da Flexibilidade.0Odair R. SantosAinda não há avaliações
- Aprendendo a mecânica quântica: equação de Schrödinger em 1DNo EverandAprendendo a mecânica quântica: equação de Schrödinger em 1DAinda não há avaliações
- Cordel-Convite Dia Nacional Da Matematica 2017 Prof Mara Matemática SESC Cidadania Goiânia-GODocumento1 páginaCordel-Convite Dia Nacional Da Matematica 2017 Prof Mara Matemática SESC Cidadania Goiânia-GOSousa MaraAinda não há avaliações
- Noble Denton Guidelines For Marine Lifting Operations (PT)Documento42 páginasNoble Denton Guidelines For Marine Lifting Operations (PT)j.inacio.filho8078Ainda não há avaliações
- Aula 02 e ExercíciosDocumento19 páginasAula 02 e ExercíciosAlves AlvesAinda não há avaliações
- Amorim e Navarro, 2012Documento7 páginasAmorim e Navarro, 2012Armando Ferreira JúniorAinda não há avaliações
- Trator Mf4275Documento2 páginasTrator Mf4275neloreor_774012085100% (3)
- A Importância Das Novas Ferramentas No Ensino e Aprendizagem de Sistemas de Duas Equações Lineares Com Duas Incógnitas PDFDocumento40 páginasA Importância Das Novas Ferramentas No Ensino e Aprendizagem de Sistemas de Duas Equações Lineares Com Duas Incógnitas PDFJosé Nelson PatrícioAinda não há avaliações
- Aula Sobre FelicidadeDocumento25 páginasAula Sobre FelicidadeCamila PedrosaAinda não há avaliações
- PT - dt.PDN.03.05.012 - Padrão de Montagens em Postes Duplo TDocumento57 páginasPT - dt.PDN.03.05.012 - Padrão de Montagens em Postes Duplo TPaulo BispoAinda não há avaliações
- Fispq - Detergente Girando SolDocumento5 páginasFispq - Detergente Girando SolAna Guberte50% (2)
- Análise - Tabela Da Lista Das Escolas - DetalhadoDocumento308 páginasAnálise - Tabela Da Lista Das Escolas - DetalhadoSamuel PedroAinda não há avaliações
- Como Elaborar Memorial Descritivo de ArquiteturaDocumento5 páginasComo Elaborar Memorial Descritivo de ArquiteturaMarcelo CardosoAinda não há avaliações
- Questões de Concurso - Professores Da Educação Infantil.Documento6 páginasQuestões de Concurso - Professores Da Educação Infantil.Anonymous aPzoIa4Ainda não há avaliações
- FenologiaDocumento9 páginasFenologiaGiovanna SantucciAinda não há avaliações
- Orçamento e Controlo OrçamentalDocumento17 páginasOrçamento e Controlo OrçamentalGambasGambas0% (1)
- 1-2020. Textos Filo. Latinos I (A Distância)Documento6 páginas1-2020. Textos Filo. Latinos I (A Distância)Thamires GomesAinda não há avaliações
- Correios - Minhas Importações 2Documento1 páginaCorreios - Minhas Importações 2Sheila GabrielyAinda não há avaliações
- Material RodanteDocumento75 páginasMaterial RodanteJulio RezendeAinda não há avaliações
- Transformadores de Solda SoldagemDocumento11 páginasTransformadores de Solda Soldagemtchetomazela88Ainda não há avaliações
- comparaWA200 PDFDocumento66 páginascomparaWA200 PDFArmando FelixAinda não há avaliações
- NTC35Documento141 páginasNTC35Alessandro OliveiraAinda não há avaliações
- A Esquerda e o Novo LeviatãDocumento8 páginasA Esquerda e o Novo LeviatãSidnei AlvesAinda não há avaliações
- Aula 7 - MecFlu - Flutuação e EmpuxoDocumento13 páginasAula 7 - MecFlu - Flutuação e EmpuxoDaniel MendonçaAinda não há avaliações
- Pressões AnormaisDocumento38 páginasPressões AnormaisLuiz Antonio Pereira0% (1)
- Fispq Hipoclorito de Sódio Rev15Documento8 páginasFispq Hipoclorito de Sódio Rev15hycesarAinda não há avaliações
- 0 - Contabilidade, Conceito, Objeto, Objetivos, Finalidades, TécnicasDocumento45 páginas0 - Contabilidade, Conceito, Objeto, Objetivos, Finalidades, TécnicasAnonymous 4pJZJOAinda não há avaliações
- ExercíciosDocumento4 páginasExercíciosPaulo JúniorAinda não há avaliações
- CONSOLOS CURTOS ALTA REST Sad - Fabiokassouf - MDocumento122 páginasCONSOLOS CURTOS ALTA REST Sad - Fabiokassouf - MGabriel SilvaAinda não há avaliações
- E-Voo - Aeromodelismo Elétrico - Turnigy 9x v2 - RECEPTORES COMPATIVEIS !!! PDFDocumento8 páginasE-Voo - Aeromodelismo Elétrico - Turnigy 9x v2 - RECEPTORES COMPATIVEIS !!! PDFluiz33Ainda não há avaliações
- 2018 Métodos para o Tratamento de Cascalho Da Perfuração de Poços de Petróleo Uma RevisãoDocumento8 páginas2018 Métodos para o Tratamento de Cascalho Da Perfuração de Poços de Petróleo Uma RevisãoJôsy Souza100% (1)
- Relatos Inéditos Do Peregrino Russo (Anônimo)Documento74 páginasRelatos Inéditos Do Peregrino Russo (Anônimo)adrianomarqui100% (1)