Você também pode gostar
- DT-2 Apostila CompletaDocumento249 páginasDT-2 Apostila CompletaMiguel A V FuscoAinda não há avaliações
- Manual VLT 5000Documento204 páginasManual VLT 5000Alan Portela Vieira0% (1)
- Desenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoNo EverandDesenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoAinda não há avaliações
- Evangelhos Apócrifos - (A Sofia de Jesus Cristo)Documento9 páginasEvangelhos Apócrifos - (A Sofia de Jesus Cristo)Diego AntunesAinda não há avaliações
- Aula 06 Bombas e Estações Elevatórias 1Documento52 páginasAula 06 Bombas e Estações Elevatórias 1Pedro BrondaniAinda não há avaliações
- Manual K30 v6.04Documento60 páginasManual K30 v6.04Thiago CostaAinda não há avaliações
- Bateria De Gravidade: Convertendo energia gravitacional em eletricidadeNo EverandBateria De Gravidade: Convertendo energia gravitacional em eletricidadeAinda não há avaliações
- Prova 7 º Ano Matematica Sme RJDocumento16 páginasProva 7 º Ano Matematica Sme RJVanessa GomesAinda não há avaliações
- Controle Ótimo De Sistemas Dinâmicos: Teoria AplicadaNo EverandControle Ótimo De Sistemas Dinâmicos: Teoria AplicadaAinda não há avaliações
- Indutor Anti-SurtoDocumento1 páginaIndutor Anti-SurtoMiguel A V Fusco100% (1)
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Metrologia 2Documento88 páginasMetrologia 2Jesrraell MoraisAinda não há avaliações
- Memorial Descritivo AutomaçãoDocumento13 páginasMemorial Descritivo AutomaçãoregfsdgfAinda não há avaliações
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Documento1 páginaDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroAinda não há avaliações
- DisjuntorDocumento17 páginasDisjuntorMiguel A V FuscoAinda não há avaliações
- Aula 08 Alocacao de Polos ServossistemasDocumento32 páginasAula 08 Alocacao de Polos ServossistemasMichel FiuzaAinda não há avaliações
- Aula 02 Equipamentos RevBDocumento111 páginasAula 02 Equipamentos RevBModestoAinda não há avaliações
- Atividade Controle de ProcessosDocumento4 páginasAtividade Controle de ProcessosLucas SantanaAinda não há avaliações
- 6º Caderno de Matemátca - 7º AnoDocumento12 páginas6º Caderno de Matemátca - 7º AnoJacky Riquielme100% (1)
- Cópia de Apostila Do Curso de Instrumentacao e AutomacaoDocumento169 páginasCópia de Apostila Do Curso de Instrumentacao e AutomacaoJulio Cesa SilvaAinda não há avaliações
- Atividade 4Documento11 páginasAtividade 4Dj-Dénny Djr100% (1)
- Calibraçãotransdutor PressaoDocumento22 páginasCalibraçãotransdutor PressaoppatrickkkAinda não há avaliações
- Dicas Sistema TGADocumento2 páginasDicas Sistema TGAMarcelo KimuraAinda não há avaliações
- Conversores AD DADocumento9 páginasConversores AD DAMagno NetoAinda não há avaliações
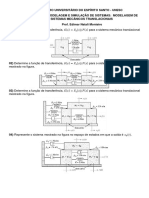
- Exercícios Modelagem de Sistemas Mecânicos Translacionais PDFDocumento2 páginasExercícios Modelagem de Sistemas Mecânicos Translacionais PDFEnzo Gomes KohlertAinda não há avaliações
- Fundamentos Da Linguagem de Programação LadderDocumento37 páginasFundamentos Da Linguagem de Programação LaddermacepaAinda não há avaliações
- Circuitos AssincronosDocumento27 páginasCircuitos AssincronosluisiduarteAinda não há avaliações
- TCC - Rafael Lima de CarvalhoDocumento47 páginasTCC - Rafael Lima de CarvalhoJoao Vitor SanchezAinda não há avaliações
- Sebenta CS PDFDocumento247 páginasSebenta CS PDFFrancisco MachadoAinda não há avaliações
- Eletricidade Basica PDFDocumento20 páginasEletricidade Basica PDFDiogo FerreiraAinda não há avaliações
- Relatório - Ondas EstacionáriasDocumento11 páginasRelatório - Ondas EstacionáriasWagner FêulipeAinda não há avaliações
- Análise CFD em Um Trocador de Calor Casco e TuboDocumento4 páginasAnálise CFD em Um Trocador de Calor Casco e TuboAndré RicardoAinda não há avaliações
- Controle PID Com Aproximação Digital para Utilização No PIC - O Blog Do MarceloDocumento8 páginasControle PID Com Aproximação Digital para Utilização No PIC - O Blog Do MarceloGuilherme FerracinoAinda não há avaliações
- WEG Inversor de Frequencia Cfw300 50066189 Catalogo Portugues BRDocumento16 páginasWEG Inversor de Frequencia Cfw300 50066189 Catalogo Portugues BRAnderson A. TorresAinda não há avaliações
- Amplificador Operacional IFpe Ampl OperDocumento53 páginasAmplificador Operacional IFpe Ampl OperDizu ZuleneAinda não há avaliações
- Ensaios Económicos de Um Transformador TrifásicoDocumento12 páginasEnsaios Económicos de Um Transformador TrifásicoRicardo Gomes100% (18)
- Relatorio de Reynolds LAB 4Documento3 páginasRelatorio de Reynolds LAB 4Gabriel Terra100% (1)
- Relatório CLPDocumento5 páginasRelatório CLPVictor MeliasAinda não há avaliações
- Conversor AD - FPGADocumento6 páginasConversor AD - FPGAVanderson NascimentoAinda não há avaliações
- Buck Espaço de Estados PDFDocumento9 páginasBuck Espaço de Estados PDFLucas Stanqueviski0% (1)
- Manual Válvula de Autorização Va 075 e Va100Documento9 páginasManual Válvula de Autorização Va 075 e Va100ivan luis nakamuraAinda não há avaliações
- Exercicios Resolvidos Sobre Lei de GaussDocumento12 páginasExercicios Resolvidos Sobre Lei de GaussCristian ViverosAinda não há avaliações
- Da História Do Fórmula UFSCDocumento6 páginasDa História Do Fórmula UFSCLucas SchroederAinda não há avaliações
- Relatório 9 - OSCILOSCÓPIO E SUAS APLICAÇÕESDocumento15 páginasRelatório 9 - OSCILOSCÓPIO E SUAS APLICAÇÕESRenato SilvaAinda não há avaliações
- CTM49Documento24 páginasCTM49Alexandre SchiavinatoAinda não há avaliações
- C71x-Manual Do ProdutoDocumento44 páginasC71x-Manual Do ProdutoRafael Murilo Xavier100% (2)
- Relatório 1 - Elet. Analógica - Curva Característica Do DiodoDocumento8 páginasRelatório 1 - Elet. Analógica - Curva Característica Do DiodoAndresa SombraAinda não há avaliações
- Metodo Dos Volumes FinitosDocumento19 páginasMetodo Dos Volumes FinitosPedro JoãoAinda não há avaliações
- Introdução Relogio Digital AssembleyDocumento1 páginaIntrodução Relogio Digital AssembleyGustavo BritoAinda não há avaliações
- Exercícios Propostos Leis de KirchoffDocumento15 páginasExercícios Propostos Leis de Kirchoffbig_vavaAinda não há avaliações
- Lista de Alarmes CLP SCHMERSALDocumento40 páginasLista de Alarmes CLP SCHMERSALCharles da Rosa50% (2)
- Prova PLC BasicoDocumento5 páginasProva PLC Basicogabrielviniciossilvamaganha100% (1)
- Redes de Petri SlidesDocumento22 páginasRedes de Petri SlidesThiago Marcelo da SilvaAinda não há avaliações
- Construção de Um Amperímetro PDFDocumento2 páginasConstrução de Um Amperímetro PDFHadassa Oliveira Cathoud100% (1)
- Trabalho Laboratorial Lançamento de ProjéteisDocumento8 páginasTrabalho Laboratorial Lançamento de ProjéteisaffrodAinda não há avaliações
- 08 - Sinalizadores LuminososDocumento4 páginas08 - Sinalizadores LuminososLeandro EgasAinda não há avaliações
- Relatorio PID ItaloDocumento6 páginasRelatorio PID ItaloMkl JeffAinda não há avaliações
- PO I - ExercíciosDocumento8 páginasPO I - ExercíciosHupp05Ainda não há avaliações
- Amostras CP, CPK PDFDocumento6 páginasAmostras CP, CPK PDFMarcus MenezesAinda não há avaliações
- Atividade 2 Arquitetura de ComputadoresDocumento4 páginasAtividade 2 Arquitetura de ComputadoresVictor CastroAinda não há avaliações
- Controle de Nível de PLC de Dois TanquesDocumento1 páginaControle de Nível de PLC de Dois TanquesDayana100% (1)
- Lista 2mecanica Dos FluidosDocumento8 páginasLista 2mecanica Dos FluidosAlineAinda não há avaliações
- LIVRO U4-RealceRespostas PDFDocumento45 páginasLIVRO U4-RealceRespostas PDFCestec Serviços Tecnicos ElétricosAinda não há avaliações
- Roteiro de Prática Laboratorial #919055Documento1 páginaRoteiro de Prática Laboratorial #919055Ádrian HenriqueAinda não há avaliações
- AlgoritmosDocumento179 páginasAlgoritmosGustavowebsantosAinda não há avaliações
- Aerogerador Com Rotação VariávelDocumento84 páginasAerogerador Com Rotação VariávelMiguel A V FuscoAinda não há avaliações
- AerogeradoresDocumento3 páginasAerogeradoresMiguel A V FuscoAinda não há avaliações
- Notas para Um CGE in MZDocumento10 páginasNotas para Um CGE in MZCassio RolimAinda não há avaliações
- Furadeira e ParafusadeiraDocumento9 páginasFuradeira e ParafusadeiraMarcelo LucasAinda não há avaliações
- Aula 02 - Estrutura Do Átomo e Isoátomos PDFDocumento9 páginasAula 02 - Estrutura Do Átomo e Isoátomos PDFitnerAinda não há avaliações
- Termodinâmica - FÍSICA (PROF. HENRIQUE)Documento6 páginasTermodinâmica - FÍSICA (PROF. HENRIQUE)Henrique ToledoAinda não há avaliações
- Teorema de Norton PDFDocumento3 páginasTeorema de Norton PDFMkl JeffAinda não há avaliações
- ESCOLA ESTADUAL TEOTÔNIO BRANDÃO VILELA Boletim 2023Documento8 páginasESCOLA ESTADUAL TEOTÔNIO BRANDÃO VILELA Boletim 2023Katia L. BarrosoAinda não há avaliações
- Matemática Anos IniciaisDocumento37 páginasMatemática Anos IniciaisMaria Helena Souza100% (1)
- UntitledDocumento37 páginasUntitledAnna Gabriele Marques de OliveiraAinda não há avaliações
- 4GL Manual PDFDocumento65 páginas4GL Manual PDFMaique AlmeidaAinda não há avaliações
- Fisico Quimica ADocumento51 páginasFisico Quimica AGisa Jacques100% (2)
- Manual Do Usuário Do PETRADocumento67 páginasManual Do Usuário Do PETRAMagno RégisAinda não há avaliações
- FichasDocumento1 páginaFichasCatarina FernandesAinda não há avaliações
- Proxmox Ceph PT BRDocumento6 páginasProxmox Ceph PT BRHalbe Bruno de AraújoAinda não há avaliações
- Optic ADocumento6 páginasOptic ApaulaorobertaoAinda não há avaliações
- Introdução À EnzimologiaDocumento23 páginasIntrodução À EnzimologiaFrancisco Oliveira100% (2)
- D2 Matemática SAEB - PENSE EXATODocumento43 páginasD2 Matemática SAEB - PENSE EXATOfbmendesAinda não há avaliações
- ABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesDocumento66 páginasABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesBárbara CastroAinda não há avaliações
- Potência Máquinas Metais, Cabos e CobreDocumento3 páginasPotência Máquinas Metais, Cabos e CobreadailsonAinda não há avaliações
- Teste - MecânicaDocumento6 páginasTeste - MecânicaLuciana SilvaAinda não há avaliações
- Mineracao Desmonte e Estabilidade de Rochas PDFDocumento79 páginasMineracao Desmonte e Estabilidade de Rochas PDFEliezer GouvêaAinda não há avaliações
- Brousseau G. SlidesDocumento67 páginasBrousseau G. SlidesE_RCARVALHO100% (1)
- Instrumentação Virtual Com LabviewDocumento20 páginasInstrumentação Virtual Com Labviewneto_e_khelenAinda não há avaliações
- De Stijl ManifestoDocumento2 páginasDe Stijl ManifestoRogeri O LiveiraAinda não há avaliações
- TEMA 2 - Outros Compostos QuímicaDocumento65 páginasTEMA 2 - Outros Compostos QuímicaAlexandre studiesAinda não há avaliações
- Análise Real 1Documento45 páginasAnálise Real 1Valdirene M. FerreiraAinda não há avaliações