Você também pode gostar
- Tabela de Defeitos Da TecnomotorDocumento47 páginasTabela de Defeitos Da TecnomotorTulio Vasconcelos79% (52)
- Filtros Digitais IIR de Butterworth Por Transformação BilinearDocumento7 páginasFiltros Digitais IIR de Butterworth Por Transformação BilinearKaren UrquijoAinda não há avaliações
- Introdução Aos Circuitos e Sistemas Eletrónicos (Icse) PDFDocumento96 páginasIntrodução Aos Circuitos e Sistemas Eletrónicos (Icse) PDFMaciel Gomes100% (1)
- Ebook WS2016 PDFDocumento89 páginasEbook WS2016 PDFGianny Marcos Fonseca AiresAinda não há avaliações
- Ebook WS2016 PDFDocumento89 páginasEbook WS2016 PDFGianny Marcos Fonseca AiresAinda não há avaliações
- Apostila de Amplificador Operacional - Unifei - ELTA00Documento42 páginasApostila de Amplificador Operacional - Unifei - ELTA00kmi70Ainda não há avaliações
- 14 Pratica 6 Curva Caracteristica MOSFET 2018 3Documento4 páginas14 Pratica 6 Curva Caracteristica MOSFET 2018 3Bruno MartinsAinda não há avaliações
- Open LabDocumento19 páginasOpen LabNoelHdezAinda não há avaliações
- MicroLogix1400 UMDocumento369 páginasMicroLogix1400 UMKarlita M.Ainda não há avaliações
- Máquinas Elétricas Rotativas: Universidade Do Estado de Santa CatarinaDocumento145 páginasMáquinas Elétricas Rotativas: Universidade Do Estado de Santa CatarinaEduardo GelingerAinda não há avaliações
- Amplificadores Operacionais e Filtros AtivosDocumento18 páginasAmplificadores Operacionais e Filtros AtivosMarcelo OliveiraAinda não há avaliações
- Corrente Alternada o Básico Do Básico Revisão para o ProvãoDocumento18 páginasCorrente Alternada o Básico Do Básico Revisão para o ProvãoRaina Rodrigues de LimaAinda não há avaliações
- Relatório 2Documento28 páginasRelatório 2Rafael RinconAinda não há avaliações
- Ensaio de Curto Circuito e Circuito Aberto Transform Ad orDocumento36 páginasEnsaio de Curto Circuito e Circuito Aberto Transform Ad orperaltabarrosAinda não há avaliações
- ApresentaçãoindutoresDocumento85 páginasApresentaçãoindutoresCamila SilvaAinda não há avaliações
- Introdução A Eletronica Digital IDocumento23 páginasIntrodução A Eletronica Digital IHans DarnwellAinda não há avaliações
- Amplificador - OperacionalDocumento40 páginasAmplificador - Operacionaltaylormoura100% (2)
- Aula 5 Principio Funcionamento Conversor ADDocumento38 páginasAula 5 Principio Funcionamento Conversor ADJonas MolletaAinda não há avaliações
- Simbologia EletrônicaDocumento10 páginasSimbologia EletrônicaWellingtonAinda não há avaliações
- TCC PWMDocumento3 páginasTCC PWMmojuja67% (3)
- Aula Mosfet PDFDocumento16 páginasAula Mosfet PDFVitor Monteiro da RochaAinda não há avaliações
- Lista EletrônicaDocumento6 páginasLista EletrônicaMurilo SantosAinda não há avaliações
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Documento22 páginasModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- SCS - Chave Controlada de SilícioDocumento13 páginasSCS - Chave Controlada de SilícioPaulinha11250% (2)
- Transistores: Transistores Antônio Padilha L. BoDocumento79 páginasTransistores: Transistores Antônio Padilha L. BoDaniel Bello BoaventuraAinda não há avaliações
- Osciladores Capitulo - 6Documento12 páginasOsciladores Capitulo - 6Matheus PadilhaAinda não há avaliações
- Contadores AssincronosDocumento30 páginasContadores AssincronosGabriel ConjoAinda não há avaliações
- Relatorio Amplificador DiferencialDocumento8 páginasRelatorio Amplificador DiferencialMarco Vinicius Uchida MeloAinda não há avaliações
- Circuito RLCDocumento3 páginasCircuito RLCsergiolec2k8Ainda não há avaliações
- Lista de Exercicios Circuitos LógicosDocumento3 páginasLista de Exercicios Circuitos LógicosAndre BomjardimAinda não há avaliações
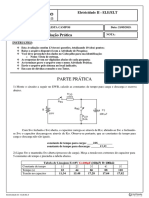
- Avaliação Prática - Eletricidade IIDocumento6 páginasAvaliação Prática - Eletricidade IINilton CamposAinda não há avaliações
- Exercicios - Medidas - Parte IIIDocumento9 páginasExercicios - Medidas - Parte IIIVictorAinda não há avaliações
- Circuitos CeifadoreSDocumento11 páginasCircuitos CeifadoreSeddietech100% (1)
- Polarização Do JFETDocumento32 páginasPolarização Do JFETWanderson FranklinAinda não há avaliações
- Relatório Eletrônica de Potência. Retificador de Meia Onda ControladoDocumento7 páginasRelatório Eletrônica de Potência. Retificador de Meia Onda ControladoaLANAinda não há avaliações
- Aula 1 - Amplificadores Operacionais 1.1-1Documento63 páginasAula 1 - Amplificadores Operacionais 1.1-1Diego OliveiraAinda não há avaliações
- Driver MOSFET para Motor BrushlessDocumento3 páginasDriver MOSFET para Motor BrushlessdiegoAinda não há avaliações
- A Equação de Terceiro GrauDocumento7 páginasA Equação de Terceiro GrauAguinaldo MendesAinda não há avaliações
- Listade Exercicios 2Documento7 páginasListade Exercicios 2Fernando Morais100% (1)
- Dimensionamento IndutorDocumento3 páginasDimensionamento IndutorAlexandreAinda não há avaliações
- Circ RettifDocumento23 páginasCirc RettifDigeo MachadoAinda não há avaliações
- TEste Curto Circuito Tranforma Dor UFMGDocumento8 páginasTEste Curto Circuito Tranforma Dor UFMGAndre Luis Carvalho MendesAinda não há avaliações
- Exercicios de Logica Digital - Lista 1Documento4 páginasExercicios de Logica Digital - Lista 1Paulo DiasAinda não há avaliações
- Tensão Alternada 2Documento9 páginasTensão Alternada 2Pedro Nava100% (1)
- RelatórioDocumento5 páginasRelatóriopaulo.kimuraAinda não há avaliações
- Diodos 1Documento74 páginasDiodos 1Cida Francelino100% (1)
- Prova de SubestaçãoDocumento9 páginasProva de SubestaçãoGustavo Rodrigo SantanaAinda não há avaliações
- Transistor Efeito de Campo PDFDocumento14 páginasTransistor Efeito de Campo PDFLECAPAS0% (1)
- Fresando Com Aparelho DivisorDocumento23 páginasFresando Com Aparelho DivisorJofre SutilliAinda não há avaliações
- Cap 2-Analise de Pequenos SinaisDocumento36 páginasCap 2-Analise de Pequenos SinaisDaniel Cafu100% (1)
- Conversores DA ADDocumento34 páginasConversores DA ADSilvio Josephik50% (2)
- Amplificador Operacional (Aulas)Documento90 páginasAmplificador Operacional (Aulas)Eduardo CosteiraAinda não há avaliações
- UC5 - Roteiro de Prática PDFDocumento33 páginasUC5 - Roteiro de Prática PDFPatrick FranciscoAinda não há avaliações
- O Temporizador 555Documento14 páginasO Temporizador 555devecchiAinda não há avaliações
- Conversores AD DADocumento24 páginasConversores AD DAbitbasicoAinda não há avaliações
- Análise para Pequenos Sinais TBJDocumento22 páginasAnálise para Pequenos Sinais TBJPaulo Rogerio0% (1)
- Amplificadores Operacionais Fundamentos e Aplicacoes Gruiter Parte 1Documento8 páginasAmplificadores Operacionais Fundamentos e Aplicacoes Gruiter Parte 1Márcio De Freitas CarneiroAinda não há avaliações
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- Projetos De Instrumentação Eletrônica Usando O ArduinoNo EverandProjetos De Instrumentação Eletrônica Usando O ArduinoAinda não há avaliações
- 07 Circuitos MotoresDocumento7 páginas07 Circuitos MotoresWellington SilvaAinda não há avaliações
- Comunicação Aberta - Material de ApoioDocumento104 páginasComunicação Aberta - Material de ApoioGianny Marcos Fonseca AiresAinda não há avaliações
- Apostila Eletronica - ValvulasDocumento11 páginasApostila Eletronica - ValvulasPaulo Roberto de AlmeidaAinda não há avaliações
- Apostila S7-N2Documento110 páginasApostila S7-N2Gianny Marcos Fonseca Aires100% (3)
- Manual de Formulas Técnicas CESTARIDocumento58 páginasManual de Formulas Técnicas CESTARIviktor_avelarAinda não há avaliações
- Apostila S7-N2Documento110 páginasApostila S7-N2Gianny Marcos Fonseca Aires100% (3)
- Injeção 2 CorsaDocumento38 páginasInjeção 2 CorsaGianny Marcos Fonseca AiresAinda não há avaliações
- Informativo Projetos Eletronicos n05Documento6 páginasInformativo Projetos Eletronicos n05Gianny Marcos Fonseca AiresAinda não há avaliações
- Saber Eletronico 464Documento68 páginasSaber Eletronico 464Giovanni Luigi100% (1)
- Logix Ap008 - PT P PDFDocumento164 páginasLogix Ap008 - PT P PDFElias FilhoAinda não há avaliações
- Apostila Rede IDEPACDocumento53 páginasApostila Rede IDEPACInforma100% (16)
- Iba02-180209-2003-Rev 3Documento7 páginasIba02-180209-2003-Rev 3Gianny Marcos Fonseca AiresAinda não há avaliações
- Manual de Pinagens - AutoLeap IIDocumento359 páginasManual de Pinagens - AutoLeap IIDouglas100% (19)
- Injeção Eletrônica 3 (VW 1abv)Documento32 páginasInjeção Eletrônica 3 (VW 1abv)Gianny Marcos Fonseca Aires100% (1)
- MN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1 PDFDocumento33 páginasMN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1 PDFGianny Marcos Fonseca AiresAinda não há avaliações
- Ebook Soft StarterDocumento8 páginasEbook Soft StarterIvanir Ferreira da SilvaAinda não há avaliações
- Treinamento Interno ParsytecDocumento83 páginasTreinamento Interno ParsytecGianny Marcos Fonseca Aires100% (2)
- MN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1 PDFDocumento33 páginasMN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1 PDFGianny Marcos Fonseca AiresAinda não há avaliações
- MN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1Documento33 páginasMN - 065 - Interface Externa - ModBus RTU - PT - V00 - 1Gianny Marcos Fonseca AiresAinda não há avaliações
- MN - 043 - Manual Inteligente CSR12!25!50 Profibus DP SMDocumento61 páginasMN - 043 - Manual Inteligente CSR12!25!50 Profibus DP SMGianny Marcos Fonseca AiresAinda não há avaliações
- Aula IV - Simbologia - Pt2Documento50 páginasAula IV - Simbologia - Pt2Rafael Cabral RebouçasAinda não há avaliações
- Manutenção Através de Hard Reset em SmartphonesDocumento52 páginasManutenção Através de Hard Reset em SmartphonesGianny Marcos Fonseca AiresAinda não há avaliações
- 1756 rm003 - PT PDocumento977 páginas1756 rm003 - PT PNelson Jacob Rech JuniorAinda não há avaliações
- Iba02-180209-2003-Rev 4 PDFDocumento7 páginasIba02-180209-2003-Rev 4 PDFGianny Marcos Fonseca AiresAinda não há avaliações
- ApostilaDocumento2 páginasApostilaGianny Marcos Fonseca AiresAinda não há avaliações
- ManualDocumento86 páginasManualGianny Marcos Fonseca AiresAinda não há avaliações
- Logix pp002 - PT P PDFDocumento6 páginasLogix pp002 - PT P PDFGianny Marcos Fonseca AiresAinda não há avaliações
- Apostila Educação PatrimonialDocumento30 páginasApostila Educação PatrimonialCarine AraújoAinda não há avaliações
- BASTIDE, O Sagrado SelvagemDocumento15 páginasBASTIDE, O Sagrado SelvagemRenan ChavesAinda não há avaliações
- Lista de Exercícios Materiais de Construção Civil IDocumento3 páginasLista de Exercícios Materiais de Construção Civil IcamilaafsAinda não há avaliações
- EXERCÍCIOS de Fixação Do Word 70 QuestõesDocumento15 páginasEXERCÍCIOS de Fixação Do Word 70 QuestõesSilas Thierry50% (2)
- Paraiba, Mulher Macho. Tese. AAbrantes PDFDocumento254 páginasParaiba, Mulher Macho. Tese. AAbrantes PDFVictor AlbuquerqueAinda não há avaliações
- Avaliação de Educação FísicaDocumento2 páginasAvaliação de Educação FísicaJônatas Lizardo100% (1)
- Dicas Sobre Matrizes e Deter Min AntesDocumento15 páginasDicas Sobre Matrizes e Deter Min Anteslogusmao100% (1)
- Latina Iluminação Apresentação PDFDocumento13 páginasLatina Iluminação Apresentação PDFS10 H2eAinda não há avaliações
- Referencial Teórico TCC IfesDocumento2 páginasReferencial Teórico TCC IfesMárcioCReisAinda não há avaliações
- TTM2Documento100 páginasTTM2Anonymous liMXP6QAinda não há avaliações
- Arida e Lara Rezende - Inflação Inercial e Reforma MonetáriaDocumento26 páginasArida e Lara Rezende - Inflação Inercial e Reforma MonetáriaMarcelo PignatariAinda não há avaliações
- Questões PMTDocumento3 páginasQuestões PMTBrunoAinda não há avaliações
- ParecerDocumento4 páginasParecerAnthony Gabriel Oliveira FeitosaAinda não há avaliações
- Xavier - Letramento-Digital PDFDocumento10 páginasXavier - Letramento-Digital PDFLuiz Rosalvo CostaAinda não há avaliações
- PortfolioDocumento4 páginasPortfolioChris SiqueiraAinda não há avaliações
- Estudo Do Comprimento VirtualDocumento205 páginasEstudo Do Comprimento VirtualCarina CarvalhoAinda não há avaliações
- Medida Da Resistência Do Circuito de TerraDocumento13 páginasMedida Da Resistência Do Circuito de TerraJoao Miguel SilvaAinda não há avaliações
- Introdução - ConclusãoDocumento3 páginasIntrodução - ConclusãoLucas Fernandes0% (3)
- Prova de Engenheiro Mecânico - PFDocumento17 páginasProva de Engenheiro Mecânico - PFDouglas CarvalhoAinda não há avaliações
- NIT Diois 19 - 12Documento48 páginasNIT Diois 19 - 12mlpradines100% (1)
- Ie02 Manual de Aterramento EletricoDocumento20 páginasIe02 Manual de Aterramento EletricotiagoorgadoAinda não há avaliações
- Kit Mídia - Canal Da EngenhariaDocumento6 páginasKit Mídia - Canal Da EngenhariaJosé PedroAinda não há avaliações
- BG 19205Documento30 páginasBG 19205Carlos HenriqueAinda não há avaliações
- MANUEL, Ivan A. O Ensino de Historia No BrasilDocumento36 páginasMANUEL, Ivan A. O Ensino de Historia No BrasilGabriel VasconcelosAinda não há avaliações
- Kely Rodrigues Da Cruz - Teste Avaliativo de Língua PortuguesaDocumento5 páginasKely Rodrigues Da Cruz - Teste Avaliativo de Língua PortuguesaKely Rodrigues Da CruzAinda não há avaliações
- Regulamento Técnico de Identidade e QualidadeDocumento3 páginasRegulamento Técnico de Identidade e QualidadeCarol MicalliAinda não há avaliações
- Gastronomia Baiana Como Identidade e Patrimonio Culrural PDFDocumento12 páginasGastronomia Baiana Como Identidade e Patrimonio Culrural PDFdiogoscvAinda não há avaliações
- Estatística Aplicada 06-03Documento42 páginasEstatística Aplicada 06-03Nivaldo SiláAinda não há avaliações
- Kant e São Tomás de AquinoDocumento6 páginasKant e São Tomás de AquinoPablo CanovasAinda não há avaliações
- Front-End 007 AjluhnqoDocumento52 páginasFront-End 007 AjluhnqoRamon TayronAinda não há avaliações