Você também pode gostar
- Momento de Umaforça em Relação A Um PontoDocumento32 páginasMomento de Umaforça em Relação A Um PontoMaikon Queiroz75% (4)
- A 06Documento0 páginaA 06José BritesAinda não há avaliações
- Mecanica ExerciciosDocumento16 páginasMecanica ExerciciosTaiane LacerdaAinda não há avaliações
- Fisica 11aDocumento14 páginasFisica 11aBenedito LuisAinda não há avaliações
- Capitulo 02 Vetores 332Documento22 páginasCapitulo 02 Vetores 332Suzi Cardoso de CarvalhoAinda não há avaliações
- 5 - Corpos Rigidos - Sistemas Equivalentes de ForcasDocumento54 páginas5 - Corpos Rigidos - Sistemas Equivalentes de ForcasLuis RitoAinda não há avaliações
- APOSTILA ResistenciaDocumento43 páginasAPOSTILA ResistenciaMario Machado100% (1)
- 2corpos RigidosDocumento48 páginas2corpos RigidosBrunaGomesAinda não há avaliações
- 1 Lista de Mecanica 2011 .1Documento4 páginas1 Lista de Mecanica 2011 .1Ari PereiraAinda não há avaliações
- Aula 3 - Sistemas de ForçasDocumento21 páginasAula 3 - Sistemas de ForçasAntonio Alves Pereira FilhoAinda não há avaliações
- Trabalho Sistema Massa Mola - PDFDocumento14 páginasTrabalho Sistema Massa Mola - PDFeduardo_montanhaAinda não há avaliações
- Ae rf11 Resol Ficha 1Documento4 páginasAe rf11 Resol Ficha 1GabrielaAinda não há avaliações
- Lista de ExerciciosDocumento12 páginasLista de ExerciciosGuilherme RomeroAinda não há avaliações
- Sistemas Equivalentes-2020Documento4 páginasSistemas Equivalentes-2020picture00Ainda não há avaliações
- 200 Questões - AV 1, 2 e 3 - Mecânica GeralDocumento51 páginas200 Questões - AV 1, 2 e 3 - Mecânica Geraljamaros67% (6)
- Av2 - Mecânica GeralDocumento6 páginasAv2 - Mecânica GeralFernando GuimarãesAinda não há avaliações
- Ensaio TorçãoDocumento24 páginasEnsaio TorçãoCícero DumAinda não há avaliações
- Gabarito Lista-1Documento11 páginasGabarito Lista-1Eduardo GomideAinda não há avaliações
- Resmat 1Documento6 páginasResmat 1Allex LimaAinda não há avaliações
- Lista de Exercicios de Fixacao A2Documento9 páginasLista de Exercicios de Fixacao A2Luciano PitonAinda não há avaliações
- Física - Fascículo 03 - Dinâmica - Trabalho, Energia e PotênciaDocumento8 páginasFísica - Fascículo 03 - Dinâmica - Trabalho, Energia e PotênciaConcurso Vestibular100% (7)
- Alguns Exercicios Resolvidos Do Halliday Cap 03 5º Ed.Documento17 páginasAlguns Exercicios Resolvidos Do Halliday Cap 03 5º Ed.Allan Yuske100% (1)
- 3 - Equilíbrio Dos Corpos RígidosDocumento54 páginas3 - Equilíbrio Dos Corpos RígidosRaquelBiscontiAinda não há avaliações
- Ae rf10 Teste Resol 1Documento7 páginasAe rf10 Teste Resol 1Francisco Jesus100% (1)
- Calculo Elevação Fuso TrapezoidalDocumento2 páginasCalculo Elevação Fuso TrapezoidalJuliano Reis PereiraAinda não há avaliações
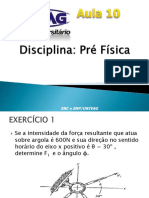
- Aula Pre Fisica Univag ExerciciosDocumento29 páginasAula Pre Fisica Univag ExerciciosHUGO LUCAS EVANGELISTA JUNIIORAinda não há avaliações
- ENG01139 - Área 1 Lista de Exercícios 0 Com GabaritoDocumento6 páginasENG01139 - Área 1 Lista de Exercícios 0 Com GabaritoMarcos Wilson OgataAinda não há avaliações
- Equilibrio de Forças CoplanaresDocumento21 páginasEquilibrio de Forças CoplanaresJunior TiãoAinda não há avaliações
- EME311 Lista1Documento3 páginasEME311 Lista1Gerson MonteiroAinda não há avaliações
- Lista de ExercíciosDocumento9 páginasLista de ExercíciosPaulo Moreira0% (1)
- Lista de Exercícios - 1o MóduloDocumento14 páginasLista de Exercícios - 1o MóduloJoão LeiteAinda não há avaliações
- Elite Resolve ITA 2012-Fisica PDFDocumento16 páginasElite Resolve ITA 2012-Fisica PDFsagan17Ainda não há avaliações
- POTENCIAÇÃODocumento39 páginasPOTENCIAÇÃOInara Platenik0% (1)
- Lista de Exercicios UnificadaDocumento29 páginasLista de Exercicios UnificadaLuis Fernando da RozaAinda não há avaliações
- Osvaldo Shigueru Nakao EXERCÍCIOS DE REVISÃO 1Documento59 páginasOsvaldo Shigueru Nakao EXERCÍCIOS DE REVISÃO 1Fátima BegenaAinda não há avaliações
- Notas de Aula 3 - Movimento Plano de Corpos Rígidos - Força e Aceleração.Documento10 páginasNotas de Aula 3 - Movimento Plano de Corpos Rígidos - Força e Aceleração.Fernando Silva PenaAinda não há avaliações
- Potência CA PDFDocumento14 páginasPotência CA PDFDaniel TomoyoseAinda não há avaliações
- Física I Resolução de Exercícios 2014DDocumento17 páginasFísica I Resolução de Exercícios 2014DLudielenRibeiro100% (6)
- Respostas e Justificativas ED Complementos de Física - Eng. 4º Semestre UNIPDocumento21 páginasRespostas e Justificativas ED Complementos de Física - Eng. 4º Semestre UNIPGustavo Bolsoni100% (1)
- Gabarito 2 Lista de ExerciciosDocumento4 páginasGabarito 2 Lista de ExerciciosThalys LoiolaAinda não há avaliações
- RFQ 10 Teste4 Fev2024Documento8 páginasRFQ 10 Teste4 Fev2024Andreia NazaréAinda não há avaliações
- Lista de Exercicios 1 de Estática e DinâmicaDocumento20 páginasLista de Exercicios 1 de Estática e DinâmicaWallace AguiarAinda não há avaliações
- 4 MomentoDocumento42 páginas4 MomentoRENOMA ENGENHARIAAinda não há avaliações
- Física - Exercícios ResolvidosDocumento27 páginasFísica - Exercícios ResolvidosSérgio RigelAinda não há avaliações
- Lista de Exercicios de Fixacao A1Documento9 páginasLista de Exercicios de Fixacao A1Luciano PitonAinda não há avaliações
- Exercícios de Integrais e Equações Integro-DiferenciaisNo EverandExercícios de Integrais e Equações Integro-DiferenciaisAinda não há avaliações
- Scorpyn Scanner 2014 - Manual de UsuárioDocumento14 páginasScorpyn Scanner 2014 - Manual de UsuáriostuartAinda não há avaliações
- Estudo Das Posturas Básicas Dos Exercícios Da Ginástica ArtísticaDocumento8 páginasEstudo Das Posturas Básicas Dos Exercícios Da Ginástica ArtísticaBest PerformanceAinda não há avaliações
- Um Sistema de Vagabond.Documento9 páginasUm Sistema de Vagabond.Iago Rodrigues de AlmeidaAinda não há avaliações
- Serviço: Eixo Dianteiro (Marmon Herrington MT 11S A)Documento53 páginasServiço: Eixo Dianteiro (Marmon Herrington MT 11S A)Vagner CezarAinda não há avaliações
- Unifap 2013 14Documento100 páginasUnifap 2013 14Andrine SamuelAinda não há avaliações
- Ensino Andebol Atavés Jogos ReduzidosDocumento160 páginasEnsino Andebol Atavés Jogos ReduzidosschagasAinda não há avaliações
- Siga Estes Alongamentos de Membros InferioresDocumento19 páginasSiga Estes Alongamentos de Membros InferioresEduardo VieiraAinda não há avaliações
- Planilha para Tabulação Da Prova Diagnostica - CópiaDocumento7 páginasPlanilha para Tabulação Da Prova Diagnostica - CópiaWanderson Teixeira GomesAinda não há avaliações
- 2013 Teorica - GabaritoDocumento5 páginas2013 Teorica - GabaritoFernando LemosAinda não há avaliações
- Manual Técnico GPRS ELLO Universal - Revisão 0.inddDocumento5 páginasManual Técnico GPRS ELLO Universal - Revisão 0.inddTalyson BragaAinda não há avaliações
- Regulamento Da Copa Libertadores Da Baixa 2023.2Documento17 páginasRegulamento Da Copa Libertadores Da Baixa 2023.2Loja instaladorAinda não há avaliações
- Planilha de Gerenciamento de Bankroll Poker Na Chapa v1 1 ATUALIZADADocumento8 páginasPlanilha de Gerenciamento de Bankroll Poker Na Chapa v1 1 ATUALIZADACLAUDOMAUAinda não há avaliações
- Aula 3 - Tranferência de Energia No Exercício FísicoDocumento26 páginasAula 3 - Tranferência de Energia No Exercício FísicoAna Paula CarvalhoAinda não há avaliações
- CorfebolDocumento23 páginasCorfebolAfonso DantasAinda não há avaliações
- Relatorio de ItinerarioDocumento30 páginasRelatorio de ItinerariovanessaAinda não há avaliações
- Tipos de Marcação No FutsalDocumento4 páginasTipos de Marcação No FutsalLuneta CósmicaAinda não há avaliações
- Purple Blood - Sistema-1Documento30 páginasPurple Blood - Sistema-1Ravi RodriguesAinda não há avaliações
- Mids Scan - MWM International Diagnostic SystemDocumento4 páginasMids Scan - MWM International Diagnostic SystemEmerson Borges DelfinoAinda não há avaliações
- Treino BodyWheight (Usando Peso Do Corpo)Documento6 páginasTreino BodyWheight (Usando Peso Do Corpo)Ricardo NamikiAinda não há avaliações
- VERBOS GregoDocumento5 páginasVERBOS GregoFabio PereiraAinda não há avaliações
- Escala de Trabalho 2019 - Turma ABCDDocumento2 páginasEscala de Trabalho 2019 - Turma ABCDDanilo CarvalhoAinda não há avaliações
- Lançamentos Vertical e HorizontalDocumento13 páginasLançamentos Vertical e HorizontalCamila LinsAinda não há avaliações
- Dados Cadastrais SCDPDocumento14 páginasDados Cadastrais SCDPJoao ViniciusAinda não há avaliações
- Atualização de Software SP8730 - Android 10Documento5 páginasAtualização de Software SP8730 - Android 10Arthur SantosAinda não há avaliações
- Fastwind 150 RDocumento54 páginasFastwind 150 RDavidÉmileDurkheim100% (1)
- Gina TicaDocumento11 páginasGina Ticaabacar usseneAinda não há avaliações
- Sócio Torcedor SPFCDocumento1 páginaSócio Torcedor SPFCFilipe Ramos FernandesAinda não há avaliações
- More Than WordsDocumento2 páginasMore Than WordsthIAGO SAMPAIOAinda não há avaliações
- PDF Apostila Franceses CompressDocumento128 páginasPDF Apostila Franceses CompressInjetronic Scope CarAinda não há avaliações
- Jujutsu Maldicoes e Shikigamis RPGDocumento7 páginasJujutsu Maldicoes e Shikigamis RPGWalther ChinatoAinda não há avaliações