Você também pode gostar
- Sensor de VelocidadeDocumento32 páginasSensor de Velocidadejotasl100% (2)
- Diag. de Falhas Eletroeletrônicas MWM Série 12 PDFDocumento36 páginasDiag. de Falhas Eletroeletrônicas MWM Série 12 PDFMarlon de AzevedoAinda não há avaliações
- Curso Consertos de DVDDocumento31 páginasCurso Consertos de DVDses3200850% (2)
- 7 - Microcontrolador e MicroprocessadorDocumento23 páginas7 - Microcontrolador e MicroprocessadorGabriel Vasconcelos NogueiraAinda não há avaliações
- A Matemágica Da Roda FônicaDocumento9 páginasA Matemágica Da Roda FônicaRuanWheeling50% (2)
- Aplicação de Encoders Usando CLPDocumento19 páginasAplicação de Encoders Usando CLPRgerFbianAinda não há avaliações
- Apostila - Informática para Concursos Com Exercícios - Versão Dezembro 2017Documento100 páginasApostila - Informática para Concursos Com Exercícios - Versão Dezembro 2017Leo Ferreira100% (1)
- Análise de OrbitaDocumento9 páginasAnálise de OrbitaAntenor322Ainda não há avaliações
- EncoderDocumento17 páginasEncoderRoberto VerhagenAinda não há avaliações
- HanRongDa HRD-747 Operation Manual PTBRDocumento34 páginasHanRongDa HRD-747 Operation Manual PTBRRicardo Martins FerreiraAinda não há avaliações
- SAP-3 (Cap 12 - Malvino)Documento33 páginasSAP-3 (Cap 12 - Malvino)Klayton Marcondes100% (1)
- Encoder Absoluto e IncrementalDocumento5 páginasEncoder Absoluto e IncrementalVanildo Silva100% (1)
- Servo MotoresDocumento12 páginasServo Motoreseric976100% (1)
- 86095-Instruções de Reprogramação Do GS2-Sep 3 2012Documento4 páginas86095-Instruções de Reprogramação Do GS2-Sep 3 2012mateus rodrigo de sáAinda não há avaliações
- Geradores Pulso EncodersDocumento35 páginasGeradores Pulso EncodersMateusMendonca100% (1)
- Sensor ResolverDocumento11 páginasSensor ResolverRodolphoCanovaAinda não há avaliações
- Introdução À Robótica - Matérica TeóricaDocumento10 páginasIntrodução À Robótica - Matérica TeóricaMauricioAinda não há avaliações
- Trabalho de Calculo Numerico Usando Odometria em RobosDocumento12 páginasTrabalho de Calculo Numerico Usando Odometria em RobosHugo Alex SilvaAinda não há avaliações
- Características Gerais Do Transdutor de Velocidade e Encoder.Documento5 páginasCaracterísticas Gerais Do Transdutor de Velocidade e Encoder.JenniferAinda não há avaliações
- XC207PD00 PT B6 RevBDocumento8 páginasXC207PD00 PT B6 RevBfelltec felltecAinda não há avaliações
- Como Funcionam OS ENCODERS - Mecatrônica Atual - Automação Industrial de Processos e ManufaturaDocumento9 páginasComo Funcionam OS ENCODERS - Mecatrônica Atual - Automação Industrial de Processos e ManufaturaGlaucio SoaresAinda não há avaliações
- Encoder Absoluto e IncrementalDocumento5 páginasEncoder Absoluto e IncrementalJosé Bezerra José100% (1)
- Acelerômetro MPU 6050Documento17 páginasAcelerômetro MPU 6050Raynara PrudenteAinda não há avaliações
- Atividade ProjetoDocumento7 páginasAtividade ProjetoGustavo HenriqueAinda não há avaliações
- Anotação Sobre EncodersDocumento1 páginaAnotação Sobre EncodersPeterson Salles VazAinda não há avaliações
- Electron Sistema de Medi oDocumento21 páginasElectron Sistema de Medi oleon_rochaAinda não há avaliações
- Sensores RobóticaDocumento12 páginasSensores RobóticaThaison PrandoAinda não há avaliações
- Sensores EssenciaisDocumento3 páginasSensores EssenciaisFabio DaronAinda não há avaliações
- SensoresDocumento16 páginasSensoresLeandro SalvadorAinda não há avaliações
- Manual de Start-Up Proteo Mini V1.00. ÍndiceDocumento33 páginasManual de Start-Up Proteo Mini V1.00. ÍndiceThiago Teixeira PiresAinda não há avaliações
- ROBM9 - 8. Encoder e ResolverDocumento27 páginasROBM9 - 8. Encoder e ResolverMatheus Dos santosAinda não há avaliações
- Prática 7 - Medição de PresençaDocumento5 páginasPrática 7 - Medição de PresençaLuana MeloAinda não há avaliações
- TACOGERADORDocumento5 páginasTACOGERADORWilton Silva de OliveiraAinda não há avaliações
- LVDTsDocumento11 páginasLVDTsMaribaldo MacielAinda não há avaliações
- LVDTsDocumento11 páginasLVDTsMaribaldo MacielAinda não há avaliações
- Apostila Scope Truck - E-BookDocumento35 páginasApostila Scope Truck - E-BookJoão Vitor da SilvaAinda não há avaliações
- Cinemtica 1 Fsica No ENEMDocumento33 páginasCinemtica 1 Fsica No ENEMJoão PedroAinda não há avaliações
- Arduino e Cia - Como Medir A Rotação de Um Motor Com o Sensor de Velocidade LM393Documento6 páginasArduino e Cia - Como Medir A Rotação de Um Motor Com o Sensor de Velocidade LM393Everton Klinger Sousa SilvaAinda não há avaliações
- 27 - Sensor de Rotacao e Posicao Da Arvore de Manivelas IIDocumento10 páginas27 - Sensor de Rotacao e Posicao Da Arvore de Manivelas IIMARLON PEREIRAAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Obtendo O Sentido E Velocidade Encoder De Quadratura Com Base No ArduinoNo EverandObtendo O Sentido E Velocidade Encoder De Quadratura Com Base No ArduinoAinda não há avaliações
- Régua Óptica, Motor de Passo e Servo DriveDocumento3 páginasRégua Óptica, Motor de Passo e Servo DriveEduardo HenriqueAinda não há avaliações
- Micro - Pratica Sensor UltrassônicoDocumento8 páginasMicro - Pratica Sensor UltrassônicoTHALLES RODRIGUESAinda não há avaliações
- Tacômetro ResumoDocumento3 páginasTacômetro ResumoyKiinG zAinda não há avaliações
- Aula 4 - ARDUINO Servo Motor e Motor de Passo e PotenciômetroDocumento35 páginasAula 4 - ARDUINO Servo Motor e Motor de Passo e PotenciômetroPaulo LuizAinda não há avaliações
- Relogio Digital Cefet PBDocumento2 páginasRelogio Digital Cefet PBLuciene Ferreira Bezerrq FerreiraAinda não há avaliações
- Aula 6 - MicrocontroladoresDocumento39 páginasAula 6 - MicrocontroladoresMaximiano MartinsAinda não há avaliações
- Autom. Resumo TacômetroDocumento2 páginasAutom. Resumo TacômetrojeniferfernandaAinda não há avaliações
- Teoria 19 EncodersDocumento13 páginasTeoria 19 EncodersAmanda DiasAinda não há avaliações
- Características Das Grandezas Elétricas II-A Corrente AlternaDocumento9 páginasCaracterísticas Das Grandezas Elétricas II-A Corrente AlternaSalome Ribeiro100% (1)
- Roteiro Lab 6 ServomotorDocumento3 páginasRoteiro Lab 6 ServomotorResponde aiAinda não há avaliações
- Exercicios de RoboticaDocumento3 páginasExercicios de RoboticaJDTAinda não há avaliações
- Ea 211 Up!Documento1 páginaEa 211 Up!João RomanoAinda não há avaliações
- Mcu TeoriaDocumento6 páginasMcu TeoriaRafael BolognesiAinda não há avaliações
- 28 - Sensor de Rotacao e Posicao Da Arvore de Manivelas IIIDocumento13 páginas28 - Sensor de Rotacao e Posicao Da Arvore de Manivelas IIIMARLON PEREIRAAinda não há avaliações
- Trabalho Final - Eletronica AplicadaDocumento13 páginasTrabalho Final - Eletronica AplicadaNátali SchmidtAinda não há avaliações
- Geradores de Sinais-1Documento16 páginasGeradores de Sinais-1Dérick PonguaneAinda não há avaliações
- Circuito Monitor de Batimentos CardiacosDocumento6 páginasCircuito Monitor de Batimentos CardiacosPedro Militao CoboAinda não há avaliações
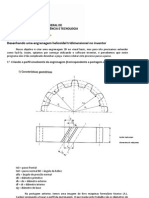
- Denhando Uma em Helicoidal Tri DimensionalDocumento10 páginasDenhando Uma em Helicoidal Tri DimensionalIgor TrevisanAinda não há avaliações
- Lab9, Sensores de PresençaDocumento6 páginasLab9, Sensores de PresençaGabriel RibeiroAinda não há avaliações
- Aula 2 - Movimento CircularDocumento27 páginasAula 2 - Movimento Circularjoaquimj283Ainda não há avaliações
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte XiiiNo EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte XiiiAinda não há avaliações
- Obtendo O Sentido, Velocidade E Posição Encoder Absoluto Com Base No ArduinoNo EverandObtendo O Sentido, Velocidade E Posição Encoder Absoluto Com Base No ArduinoAinda não há avaliações
- Matrizes em Fortran 90Documento12 páginasMatrizes em Fortran 90DavidAinda não há avaliações
- Aula 06 RevisadaDocumento19 páginasAula 06 RevisadaQualidadeSidertecnicAinda não há avaliações
- Privilege EscalationDocumento17 páginasPrivilege EscalationLucas CartolariAinda não há avaliações
- Manual Edge 800Documento64 páginasManual Edge 800nmcarlosAinda não há avaliações
- Aulas Do Módulo 02Documento450 páginasAulas Do Módulo 02dougfbrumAinda não há avaliações
- Gerenciador CCK AutomationDocumento14 páginasGerenciador CCK AutomationthiagodorockkAinda não há avaliações
- Programa DebugDocumento14 páginasPrograma Debugnikinha2011Ainda não há avaliações
- Tipos de MemoriasDocumento16 páginasTipos de MemoriasOperador CedesprovaiAinda não há avaliações
- Ciclo de BuscaDocumento11 páginasCiclo de BuscaToomuchbassAinda não há avaliações
- Apostila Pse 2013 2RRDocumento65 páginasApostila Pse 2013 2RRAlejandro Solis GomezAinda não há avaliações
- Fonte Chaveada SchneiderDocumento37 páginasFonte Chaveada Schneidered.valleAinda não há avaliações
- Pacote para Concursos de Ti Cursos Regulares Sistemas Operacionais para Concursos Curso Regular Au Aula 01Documento119 páginasPacote para Concursos de Ti Cursos Regulares Sistemas Operacionais para Concursos Curso Regular Au Aula 01Saulo MedradoAinda não há avaliações
- Web Ef PR Tec 01 Vol1 2022 V5 P5Documento192 páginasWeb Ef PR Tec 01 Vol1 2022 V5 P5Zack 1206Ainda não há avaliações
- Artigo BSBR 2Documento11 páginasArtigo BSBR 2Cainan TeixeiraAinda não há avaliações
- 迪文DGUS屏开发指南 V43Documento70 páginas迪文DGUS屏开发指南 V43LeonardoMarcosMoserAinda não há avaliações
- Arquitetura Iot 6-10Documento3 páginasArquitetura Iot 6-10Antonio de Jesus MatosAinda não há avaliações
- Lab 1 Tristate Bus MemóriaDocumento3 páginasLab 1 Tristate Bus MemóriaAugusto MagalhãesAinda não há avaliações
- 1 - Treinamento SQL Tuning Capitulo 1 Conceitos BDDocumento127 páginas1 - Treinamento SQL Tuning Capitulo 1 Conceitos BDthales3238juniorAinda não há avaliações
- 3 - SimuladoDocumento12 páginas3 - Simuladosalacriadaff01Ainda não há avaliações
- Curso - Operador de MicroDocumento35 páginasCurso - Operador de Microfilipe007Ainda não há avaliações
- ManualSP 6000 EnsaqueduploOperaçãoDocumento32 páginasManualSP 6000 EnsaqueduploOperaçãoSergio Ricardo Pizzi100% (2)
- Simulado Arquitetura de Computadores - Curso Gestão em TI - EstacioDocumento3 páginasSimulado Arquitetura de Computadores - Curso Gestão em TI - EstaciolqueijaAinda não há avaliações
- RT810 - 200 - Referà Ncia Técnica - Revisà o 10Documento26 páginasRT810 - 200 - Referà Ncia Técnica - Revisà o 10Wilker JesusAinda não há avaliações
- Apostila Modulo3 AUXILIAR PDFDocumento27 páginasApostila Modulo3 AUXILIAR PDFEDVANDERSON DA SILVA CAMPOSAinda não há avaliações