Você também pode gostar
- O Jeito Disney de Encantar Os Clientes - 1 EdiçãoDocumento141 páginasO Jeito Disney de Encantar Os Clientes - 1 EdiçãoYan Rocha100% (5)
- O Lobo de Wall StreetDocumento367 páginasO Lobo de Wall StreetYan RochaAinda não há avaliações
- CeaDocumento307 páginasCeamaísa_cordeiro100% (4)
- Tabela Renault Codigo de Peças PDFDocumento1.013 páginasTabela Renault Codigo de Peças PDFclaudiompt50% (4)
- Ciclotron Amplificador NPRC 500Documento2 páginasCiclotron Amplificador NPRC 500Antonio MacedoAinda não há avaliações
- Elementos de MáquinasDocumento9 páginasElementos de MáquinasAlber DuqueAinda não há avaliações
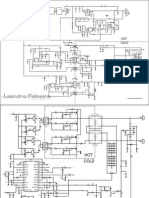
- 40-IP42CS-PWI1XG - Esquema ElétricoDocumento2 páginas40-IP42CS-PWI1XG - Esquema ElétricoFernando Silva100% (9)
- Esta002 17 Lab03 QSDocumento8 páginasEsta002 17 Lab03 QSLetyflixAinda não há avaliações
- Formulas Analise de CircuitosDocumento3 páginasFormulas Analise de CircuitosLuan SantosAinda não há avaliações
- Aula3 - Analise Senoidal e Fasores Parte 2 PDFDocumento24 páginasAula3 - Analise Senoidal e Fasores Parte 2 PDFGuilherme NardezAinda não há avaliações
- Aula 4 CCE 2003 2004Documento25 páginasAula 4 CCE 2003 2004joeAinda não há avaliações
- CEL099 - 003 Aplicações de Diodos PDFDocumento32 páginasCEL099 - 003 Aplicações de Diodos PDFMatheusAinda não há avaliações
- Lista 8 2021Documento3 páginasLista 8 2021Fábio doPneuAinda não há avaliações
- ... Tabela Eletrica-SAFA-2° Sem-2020Documento10 páginas... Tabela Eletrica-SAFA-2° Sem-2020Luk 031Ainda não há avaliações
- Aula 09 PDFDocumento22 páginasAula 09 PDFChristianAinda não há avaliações
- Aula018 RLC Natural 2018 1Documento79 páginasAula018 RLC Natural 2018 1luangoAinda não há avaliações
- Circuitos Elétricos II AULA 05 (03/04/2023) : Capítulo 1Documento18 páginasCircuitos Elétricos II AULA 05 (03/04/2023) : Capítulo 1julia mariaAinda não há avaliações
- Aula 05Documento37 páginasAula 05Leonardo ViniciusAinda não há avaliações
- Formulario Jun 2020Documento2 páginasFormulario Jun 2020Octávio AndradeAinda não há avaliações
- Carga e Descarga de CapacitoresDocumento5 páginasCarga e Descarga de CapacitoresEleicimarAinda não há avaliações
- ANTRACIR2017 CAP4 Pgs 45 A 62Documento18 páginasANTRACIR2017 CAP4 Pgs 45 A 62Matheus SilvaAinda não há avaliações
- Aula 1 - Revisão de Conceitos de ElectricidadeDocumento117 páginasAula 1 - Revisão de Conceitos de ElectricidadeJacinto NhamposseAinda não há avaliações
- Carga e Descarga de CapacitoresDocumento3 páginasCarga e Descarga de CapacitoresCaio BianchiAinda não há avaliações
- Slide4-Excitacao Senoidal e Fasores - RefDocumento17 páginasSlide4-Excitacao Senoidal e Fasores - RefPatrick MachadoAinda não há avaliações
- Capitulo 3Documento29 páginasCapitulo 3Camila SantosAinda não há avaliações
- Ficha 3Documento13 páginasFicha 3Hednayra ManhamanhaAinda não há avaliações
- Problemas Resolvidos CA CCDocumento39 páginasProblemas Resolvidos CA CCsoares.nguerra8634Ainda não há avaliações
- Apostila 2 - Regime Permanente Senoidal - Fasores - 21Documento54 páginasApostila 2 - Regime Permanente Senoidal - Fasores - 21Atividades FenTransAinda não há avaliações
- Azdoc Tips-Arquivo PDFDocumento20 páginasAzdoc Tips-Arquivo PDFalissonafsAinda não há avaliações
- AFA en EFOMM Prep Simulado en 1 Dia 2 GabaritoDocumento11 páginasAFA en EFOMM Prep Simulado en 1 Dia 2 GabaritoGeovana Cid PereiraAinda não há avaliações
- Cap. III - Análise de Circuitos em Regime TransitórioDocumento9 páginasCap. III - Análise de Circuitos em Regime TransitórioMoisés Lourenço100% (1)
- Aulas 19 A 23 - Potências PDFDocumento24 páginasAulas 19 A 23 - Potências PDFagangster100% (1)
- 06 Modulo III Parte 1Documento19 páginas06 Modulo III Parte 1Gabriel Henrique De Martin AndrettaAinda não há avaliações
- Exemplo Transitorios 2022 RCDocumento2 páginasExemplo Transitorios 2022 RCJúlio langaAinda não há avaliações
- Cap 5Documento27 páginasCap 5almeidaciscoAinda não há avaliações
- Análise de Circuitos CC - Exercícios Eng.Documento8 páginasAnálise de Circuitos CC - Exercícios Eng.mariaAinda não há avaliações
- Slides Cap 4Documento20 páginasSlides Cap 4Catarina SilvaAinda não há avaliações
- Conversores CC CCDocumento47 páginasConversores CC CCRebeca RibeiroAinda não há avaliações
- Circuitos ElétricosDocumento17 páginasCircuitos ElétricosJoão PedroAinda não há avaliações
- Formulario Circuito RC RL RLC-VERSAO2Documento1 páginaFormulario Circuito RC RL RLC-VERSAO2Rayane SousaAinda não há avaliações
- Lista2 Capitulo 5Documento7 páginasLista2 Capitulo 5Larissa KelmerAinda não há avaliações
- 2 - Movimento Retilíneo Uniformemente VariadoDocumento7 páginas2 - Movimento Retilíneo Uniformemente VariadoCarlos Kauan Moreira de SousaAinda não há avaliações
- Slide Exp. 7 - Cargas e Desc. de CapacitoresDocumento6 páginasSlide Exp. 7 - Cargas e Desc. de CapacitoresMarcos do HawaiiAinda não há avaliações
- Física I e Cálculo I - 2022Documento61 páginasFísica I e Cálculo I - 2022Cristian Alexandre MoraesAinda não há avaliações
- CAII2 SamuelDocumento16 páginasCAII2 SamuelProfessores CooperativaAinda não há avaliações
- Slide Exp. 9 - RessonânciaDocumento9 páginasSlide Exp. 9 - RessonânciaMarcos do HawaiiAinda não há avaliações
- Simulado IDocumento16 páginasSimulado IJotaPetrusAinda não há avaliações
- Lista 1Documento4 páginasLista 1GuilhermeAinda não há avaliações
- Sistemas de Potência - Apostila de Introdução À Análise de Sistemas de Potência - Rui N. Rego - UFRNDocumento123 páginasSistemas de Potência - Apostila de Introdução À Análise de Sistemas de Potência - Rui N. Rego - UFRNJacqueline SatikoAinda não há avaliações
- Prática 06Documento15 páginasPrática 06Thiago DuarteAinda não há avaliações
- Aula 7 Capacitor+e+IndutorDocumento32 páginasAula 7 Capacitor+e+IndutorElton AlvesAinda não há avaliações
- Conceitos e Teoremas de Transformações LinearesDocumento2 páginasConceitos e Teoremas de Transformações LinearesDaniel RodrigoAinda não há avaliações
- 1Documento9 páginas1Marlon Da Silva MarinhoAinda não há avaliações
- Capítulo 1Documento46 páginasCapítulo 1LucasDantasAinda não há avaliações
- Aula2 Mini CursoDocumento109 páginasAula2 Mini CursowagmullerAinda não há avaliações
- 3 Retificadores Monofásicos Não Controlados Parte 1Documento19 páginas3 Retificadores Monofásicos Não Controlados Parte 1Abel HenriqueAinda não há avaliações
- Cap. 3.1.1 - Conversor DC-DC Buck-1ßQDocumento43 páginasCap. 3.1.1 - Conversor DC-DC Buck-1ßQPedro BatistaAinda não há avaliações
- Exercício RLCDocumento13 páginasExercício RLCMarcelo0711Ainda não há avaliações
- Pot 1fDocumento5 páginasPot 1fGuilherme Soldateli VidottoAinda não há avaliações
- Resolucao Da Lista de Exercicios 02Documento12 páginasResolucao Da Lista de Exercicios 02Marcelo CarabajalAinda não há avaliações
- Lista 1Documento14 páginasLista 1Felipe Bastos MenesesAinda não há avaliações
- Programando O Pic Usando O Flowcode Parte Vi - Baseado Na Versão 6 E Pic16fNo EverandProgramando O Pic Usando O Flowcode Parte Vi - Baseado Na Versão 6 E Pic16fAinda não há avaliações
- Aula 13 - Instrumentacao & Controle 2019.3Documento9 páginasAula 13 - Instrumentacao & Controle 2019.3Yan RochaAinda não há avaliações
- Aula 8 Analise NodalDocumento11 páginasAula 8 Analise NodalFelipe PinhelliAinda não há avaliações
- Laboratório 1Documento5 páginasLaboratório 1Yan RochaAinda não há avaliações
- AIRALERTIIIDocumento11 páginasAIRALERTIIIYan RochaAinda não há avaliações
- Trabalho h225Documento19 páginasTrabalho h225Yan RochaAinda não há avaliações
- Usos Comerciais Do HelicopteroDocumento2 páginasUsos Comerciais Do HelicopteroYan RochaAinda não há avaliações
- Exercicios Eletromagnetismo ITA-IMEDocumento39 páginasExercicios Eletromagnetismo ITA-IMEYan RochaAinda não há avaliações
- Ciclotron dbs3000 Power Amplifier Schematic PDFDocumento1 páginaCiclotron dbs3000 Power Amplifier Schematic PDFfernandofsvAinda não há avaliações
- Numere ComplexeDocumento10 páginasNumere ComplexeDeák ÉvaAinda não há avaliações
- Ejercicios de Funciones de Variable Compleja y Geometría Diferencial - Martin RIvasDocumento77 páginasEjercicios de Funciones de Variable Compleja y Geometría Diferencial - Martin RIvasDavid DankyAinda não há avaliações
- Aplic NR Complexe in Geom PDFDocumento30 páginasAplic NR Complexe in Geom PDFPricope LilianaAinda não há avaliações
- O Legado de Konrad ZuseDocumento3 páginasO Legado de Konrad Zuseharilson piresAinda não há avaliações
- Informatica InstrumentalDocumento31 páginasInformatica InstrumentalJefferson DantasAinda não há avaliações
- Aula Instrumentação e Controle UFABCDocumento40 páginasAula Instrumentação e Controle UFABCYan RochaAinda não há avaliações