Você também pode gostar
- Guia Teórico Prático IIDocumento8 páginasGuia Teórico Prático IILucas ReisAinda não há avaliações
- EP1 GabaritoDocumento3 páginasEP1 GabaritoLeo WolfAinda não há avaliações
- Transformacoes Lineares PDFDocumento8 páginasTransformacoes Lineares PDFCintia SantosAinda não há avaliações
- Valores Vetores PropriosDocumento14 páginasValores Vetores PropriosArturoJLoaizaAinda não há avaliações
- PF Álgebra Linear 2010.2 (Com Solução)Documento3 páginasPF Álgebra Linear 2010.2 (Com Solução)Sasha SteellAinda não há avaliações
- Capítulo 6Documento28 páginasCapítulo 6Lucas AraujoAinda não há avaliações
- 10 01 2019 - CorreccaoDocumento3 páginas10 01 2019 - CorreccaoCamila CarvalhoAinda não há avaliações
- AD2 ALI 2022 1 GabaritoDocumento4 páginasAD2 ALI 2022 1 GabaritoNina BrandaoAinda não há avaliações
- Aula 31 - Cálculo 2 PDFDocumento12 páginasAula 31 - Cálculo 2 PDFDayvisonsuitenguAinda não há avaliações
- Diapos Aula 11Documento20 páginasDiapos Aula 11HENRIQUE GAMESAinda não há avaliações
- Resolucao de Trabalho de Algebra Linear IIDocumento8 páginasResolucao de Trabalho de Algebra Linear IIAlberto MataveleAinda não há avaliações
- Aula 11 Matriz de Uma TransformaçãoDocumento6 páginasAula 11 Matriz de Uma TransformaçãotiagozaoAinda não há avaliações
- Álgebra Transformações Lineares Exercícios ResolvidosDocumento11 páginasÁlgebra Transformações Lineares Exercícios ResolvidosAnderson VieiraAinda não há avaliações
- Diagonalizacao de OperadoresDocumento6 páginasDiagonalizacao de OperadoresDonaldo QuissicoAinda não há avaliações
- Exemplo - Isomorfismo e Automorfismo PDFDocumento4 páginasExemplo - Isomorfismo e Automorfismo PDFhugonunes89Ainda não há avaliações
- AL. CAP.6 Jose Cicero Gomes FariasDocumento12 páginasAL. CAP.6 Jose Cicero Gomes FariasCiceroGomesAinda não há avaliações
- Exemplos Nucleo Imagem TLDocumento3 páginasExemplos Nucleo Imagem TLOIBAinda não há avaliações
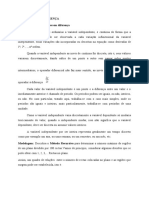
- Equações em DiferençaDocumento6 páginasEquações em DiferençaAshley RibeiroAinda não há avaliações
- Lista 4Documento3 páginasLista 4Negros Pemba RevolutionAinda não há avaliações
- Lista 2 AL1Documento2 páginasLista 2 AL1vitorwelAinda não há avaliações
- EDL ExistenciaDocumento20 páginasEDL ExistenciaJoão Luiz CarvalhoAinda não há avaliações
- Autovalores e AutovetoresDocumento14 páginasAutovalores e AutovetoresMarcelo BragaAinda não há avaliações
- Aula 9 - Transformações Lineares Planas - Parte 3 - CorrigDocumento25 páginasAula 9 - Transformações Lineares Planas - Parte 3 - CorrigLeticia de Assis BrazAinda não há avaliações
- Prova 1+2 Linalg 2017-04-03Documento3 páginasProva 1+2 Linalg 2017-04-03julhomaior1Ainda não há avaliações
- Calc2 2008 1 p1 Gabarito PDFDocumento4 páginasCalc2 2008 1 p1 Gabarito PDFdonreyrd0% (1)
- Teorema Fundamental Das CurvasDocumento5 páginasTeorema Fundamental Das CurvasJorge Luís Lisboa CardosoAinda não há avaliações
- Trabalho 1 EDP Victor HuffDocumento8 páginasTrabalho 1 EDP Victor HuffVictor Henrique HuffAinda não há avaliações
- Listaaaa 3Documento4 páginasListaaaa 3William AlencarAinda não há avaliações
- Sistemas EdoDocumento11 páginasSistemas Edomj_sousaAinda não há avaliações
- 3a Lista de Linear IDocumento9 páginas3a Lista de Linear Imarcosywata3Ainda não há avaliações
- Transformação LinearDocumento4 páginasTransformação LinearRoberto NascimentoAinda não há avaliações
- Aula 01Documento6 páginasAula 01Claudio SilvaAinda não há avaliações
- Lista 5 - Matrizes de Transformações e DiagonalizaçãoDocumento3 páginasLista 5 - Matrizes de Transformações e DiagonalizaçãoMartha DinizAinda não há avaliações
- Equações em DiferençaDocumento7 páginasEquações em DiferençaFernando Ribeiro JúniorAinda não há avaliações
- Aula 2Documento6 páginasAula 2Fran MiraAinda não há avaliações
- Parametrização e Int. de Linha - Calc MassaDocumento39 páginasParametrização e Int. de Linha - Calc MassaDiedro LimaAinda não há avaliações
- Teorema de PicardDocumento38 páginasTeorema de PicardalexandresuguimotoAinda não há avaliações
- Lista 8Documento6 páginasLista 8Sara OliveiraAinda não há avaliações
- Comprimento Arco PDFDocumento5 páginasComprimento Arco PDFArthur DaherAinda não há avaliações
- Exercício: Transformações Lineares, Subespaços e Conjunto Imagem.Documento9 páginasExercício: Transformações Lineares, Subespaços e Conjunto Imagem.felipe31415Ainda não há avaliações
- Teste2 v4 CorDocumento3 páginasTeste2 v4 CorBoaventura MaxlhopeAinda não há avaliações
- Geo Me Tria Diferencia LDocumento64 páginasGeo Me Tria Diferencia LNeisser Arturo Soto FernándezAinda não há avaliações
- Gabarito Prova 1 Turma M1Documento4 páginasGabarito Prova 1 Turma M1Paulo Luis SempeAinda não há avaliações
- RectasDocumento5 páginasRectasProblemaResolvidoAinda não há avaliações
- APX3 ALI 2022 1 GabaritoDocumento4 páginasAPX3 ALI 2022 1 GabaritoNina BrandaoAinda não há avaliações
- Aula 7 - Transformações Lineares-MárciaDocumento24 páginasAula 7 - Transformações Lineares-MárciaRolaAinda não há avaliações
- Teste 2 - MD - I21Documento3 páginasTeste 2 - MD - I21Abrão AntónioAinda não há avaliações
- 3 UNIDADE - Auto Valores e AutovetoresDocumento25 páginas3 UNIDADE - Auto Valores e AutovetoresMarvin MerlinAinda não há avaliações
- Notas de EdoDocumento17 páginasNotas de EdoAmy CaseAinda não há avaliações
- Lista 2 - Álgebra Linear (Noturno)Documento7 páginasLista 2 - Álgebra Linear (Noturno)Wilson Aparecido da SilvaAinda não há avaliações
- Teste 2 - MD - I22 - p1Documento4 páginasTeste 2 - MD - I22 - p1Abrão AntónioAinda não há avaliações
- Laplace Seminario2Documento2 páginasLaplace Seminario2Marlon MesquitaAinda não há avaliações
- Unidade III - Geometria Analítica - Retas, Planos e DistânciasDocumento20 páginasUnidade III - Geometria Analítica - Retas, Planos e DistânciasMm1285Ainda não há avaliações
- Lista 6 Q3 2022Documento2 páginasLista 6 Q3 2022Cesar Augusto PasqualottoAinda não há avaliações
- Rafael Miyazaki Funcoes Geratrizes N3NU RAFAEL MIYAZAKIDocumento5 páginasRafael Miyazaki Funcoes Geratrizes N3NU RAFAEL MIYAZAKIIbilcemAinda não há avaliações
- Aula 18Documento5 páginasAula 18Ana LígiaAinda não há avaliações
- Lista15 2017 1 Cauchy EulerDocumento2 páginasLista15 2017 1 Cauchy EulerHeitor LucenaAinda não há avaliações
- Nota de Aula 01 Linear 2Documento12 páginasNota de Aula 01 Linear 2Everton SouzaAinda não há avaliações
- EP2 PenduloDuploDocumento6 páginasEP2 PenduloDuploNatalia FachianoAinda não há avaliações
- PCM I Semana 02 Tensoes DeformacoesDocumento17 páginasPCM I Semana 02 Tensoes DeformacoesAluno da SilvaAinda não há avaliações
- Lista 1Documento1 páginaLista 1Aluno da Silva0% (1)
- 18b - Convecção Natural - ExemploDocumento6 páginas18b - Convecção Natural - ExemploAluno da SilvaAinda não há avaliações
- Cartilha Manifestação de Vontade 1Documento1 páginaCartilha Manifestação de Vontade 1Aluno da SilvaAinda não há avaliações
- Lista 2Documento1 páginaLista 2Aluno da SilvaAinda não há avaliações
- Lista 8Documento3 páginasLista 8Aluno da Silva0% (4)
- Lista 8Documento3 páginasLista 8Aluno da Silva0% (4)
- 1 Revisão de Cálculo Vetorial Eletromagnetismo Parte 6 Mat 2020 1 v1Documento14 páginas1 Revisão de Cálculo Vetorial Eletromagnetismo Parte 6 Mat 2020 1 v1Barbara Gomes FontanaAinda não há avaliações
- Matriz Eng Mecanica IFPI 02 2011Documento1 páginaMatriz Eng Mecanica IFPI 02 2011Janiel Fontineles SilvaAinda não há avaliações
- Tarefa 1 (Versao 2, Algebra - Linear - I)Documento5 páginasTarefa 1 (Versao 2, Algebra - Linear - I)Eduardo Leandro de SouzaAinda não há avaliações
- L5.LinVIII 21 2Documento8 páginasL5.LinVIII 21 2Gustavo PimentelAinda não há avaliações
- 2 Lista de Exercícios de Gaal 2020-1Documento4 páginas2 Lista de Exercícios de Gaal 2020-1Alisson de OliveiraAinda não há avaliações
- Análise de Componentes PrincipaisDocumento29 páginasAnálise de Componentes PrincipaisBruno KogaAinda não há avaliações
- Lista3 MAT3457 2018Documento11 páginasLista3 MAT3457 2018João AzevedoAinda não há avaliações
- Cálculo Numérico Com MATLABDocumento162 páginasCálculo Numérico Com MATLABtiagoAinda não há avaliações
- Lista Avaliativa I - GADocumento2 páginasLista Avaliativa I - GAMicheliAinda não há avaliações
- Matrizes - Parte 2Documento11 páginasMatrizes - Parte 2LUANA SILVAAinda não há avaliações
- Analogia Entre Sinais e VetoresDocumento21 páginasAnalogia Entre Sinais e VetoresVirgilio Jose Cambraia LopesAinda não há avaliações
- Obmu 2021Documento12 páginasObmu 2021Ruth Marcela Bown CuelloAinda não há avaliações
- 02 Cod Blocos-1Documento15 páginas02 Cod Blocos-1Irineu Antunes Júnior100% (1)
- BT InstallDocumento3 páginasBT InstallJoelAinda não há avaliações
- Exercícios MatrizesDocumento4 páginasExercícios MatrizesJuliana Schreiber100% (1)
- Determinantes de Ordem 2 Ou 3 e Suas PropriedadesDocumento36 páginasDeterminantes de Ordem 2 Ou 3 e Suas PropriedadesMatheusAraújoAinda não há avaliações
- Manual ALGA PDFDocumento231 páginasManual ALGA PDFMario Cassimo100% (1)
- Matrizes Banda Algoritmo NúmericosDocumento11 páginasMatrizes Banda Algoritmo NúmericosPaulo Jesus GonçalvesAinda não há avaliações
- 4 - Produtos de Vetores-2Documento16 páginas4 - Produtos de Vetores-2Matheus Rodrigues100% (1)
- Lista 2 - MatrizesDocumento2 páginasLista 2 - MatrizesArthur Cachoeira de MoraesAinda não há avaliações
- Mtm410018 Cálculo Avançado 5Documento2 páginasMtm410018 Cálculo Avançado 5thassio luan alves rodriguesAinda não há avaliações
- Lista de Algebra Linear Prova 2Documento5 páginasLista de Algebra Linear Prova 2DanielaAinda não há avaliações
- Diagonalização - Resumão Completo, Exercícios Passo A Passo e Videoaulas PDFDocumento9 páginasDiagonalização - Resumão Completo, Exercícios Passo A Passo e Videoaulas PDFtennysonbaumAinda não há avaliações
- EXERCÍCIOSDocumento4 páginasEXERCÍCIOSAlessandra MoraesAinda não há avaliações
- Determinantes 1Documento8 páginasDeterminantes 1Flávio Dadinho N NhamizingaAinda não há avaliações
- Caderno Didático de Física - FSC1064 - 2010 UFSDocumento148 páginasCaderno Didático de Física - FSC1064 - 2010 UFSAlexandre DelgadoAinda não há avaliações
- 8.º Apont - Subespaço Vectorial - Intersecção, Reunião, Soma e Soma DirectaDocumento8 páginas8.º Apont - Subespaço Vectorial - Intersecção, Reunião, Soma e Soma DirectaAndrah SemedoAinda não há avaliações
- Álgebra LinearDocumento4 páginasÁlgebra LinearAna OstAinda não há avaliações
- Exercícios de Álgebra Linear 3Documento9 páginasExercícios de Álgebra Linear 3André Campos RodovalhoAinda não há avaliações
- Algebra 2 ForumDocumento4 páginasAlgebra 2 ForumDaniel Carlos EmílioAinda não há avaliações
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipNo EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- A matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNo EverandA matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNota: 4.5 de 5 estrelas4.5/5 (5)
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Ensinando Matemática Com Jogos: Possibilidades e PropostasNo EverandEnsinando Matemática Com Jogos: Possibilidades e PropostasNota: 5 de 5 estrelas5/5 (1)
- Numerologia: Autoconhecimento através dos númerosNo EverandNumerologia: Autoconhecimento através dos númerosNota: 5 de 5 estrelas5/5 (4)
- Sincronicidade e entrelaçamento quântico. Campos de força. Não-localidade. Percepções extra-sensoriais. As surpreendentes propriedades da física quântica.No EverandSincronicidade e entrelaçamento quântico. Campos de força. Não-localidade. Percepções extra-sensoriais. As surpreendentes propriedades da física quântica.Nota: 5 de 5 estrelas5/5 (5)
- Modelagem Matemática E O Ensino Da MatemáticaNo EverandModelagem Matemática E O Ensino Da MatemáticaAinda não há avaliações
- Arduino Exodus Iniciantes Arduino E Projetos: Esp8266 Arduino Ide Guia Basico Arduino CodigoNo EverandArduino Exodus Iniciantes Arduino E Projetos: Esp8266 Arduino Ide Guia Basico Arduino CodigoAinda não há avaliações