Você também pode gostar
- Controle Ótimo De Sistemas Dinâmicos: Teoria AplicadaNo EverandControle Ótimo De Sistemas Dinâmicos: Teoria AplicadaAinda não há avaliações
- Trabalho Eletronica 2 - Rafael FreitasDocumento24 páginasTrabalho Eletronica 2 - Rafael FreitasRAFAEL FREITAS FERREIRAAinda não há avaliações
- Método Monte Carlo de varredura de domínio (MCS)No EverandMétodo Monte Carlo de varredura de domínio (MCS)Ainda não há avaliações
- 7-Complexidade de AlgoritmosDocumento15 páginas7-Complexidade de AlgoritmosSteve VazAinda não há avaliações
- S-PAA - Conceito e DefiniçãoDocumento8 páginasS-PAA - Conceito e Definiçãocmo.brunoAinda não há avaliações
- Aluguel Base de Dados AnálisadaDocumento11 páginasAluguel Base de Dados AnálisadaJoão VíctorAinda não há avaliações
- Algorítmos e Lógica de Programação4Documento38 páginasAlgorítmos e Lógica de Programação4crismb75Ainda não há avaliações
- Mecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCDocumento8 páginasMecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCMarcelo SilvaAinda não há avaliações
- Data Mining Na Prática - Algoritmo K-MeansDocumento9 páginasData Mining Na Prática - Algoritmo K-MeansaluysiogcAinda não há avaliações
- Aula02 UnifeiDocumento43 páginasAula02 UnifeiPP LokoAinda não há avaliações
- Artigo ERADDocumento5 páginasArtigo ERADfernando souzaAinda não há avaliações
- Controle - Tópico 1Documento9 páginasControle - Tópico 1kjonathas95Ainda não há avaliações
- Otimizacaoparametrica HillclimbingDocumento8 páginasOtimizacaoparametrica HillclimbingAndré XavierAinda não há avaliações
- Projeto Sinais FinalDocumento34 páginasProjeto Sinais FinalMateus AbdalaAinda não há avaliações
- Estudo de Caso - Sistemas de Controle 1Documento24 páginasEstudo de Caso - Sistemas de Controle 1LEONARDO GOMES DA SILVAAinda não há avaliações
- Relatório - Análise de Complexidade em AlgoritmosDocumento2 páginasRelatório - Análise de Complexidade em Algoritmosvw bpplAinda não há avaliações
- Geração de Números AleatóriosDocumento13 páginasGeração de Números AleatóriosLiliana OliveiraAinda não há avaliações
- Redução de KronDocumento10 páginasRedução de KronIvan FontelesAinda não há avaliações
- Prova CebraspeDocumento6 páginasProva CebraspeClóvis Guerim VieiraAinda não há avaliações
- LabVIEW para Implementar Técnicas de Controle Avançado para Aplicações de RobóticaDocumento10 páginasLabVIEW para Implementar Técnicas de Controle Avançado para Aplicações de RobóticaHalamasSimonAinda não há avaliações
- Otimização Paramétrica de Controladores para Um Sistema de Levitação MagnéticaDocumento8 páginasOtimização Paramétrica de Controladores para Um Sistema de Levitação MagnéticaWilker Iuri SouzaAinda não há avaliações
- Sistema de Controle para Posicionamento de Um Elevador 2020Documento11 páginasSistema de Controle para Posicionamento de Um Elevador 2020Ton marquesAinda não há avaliações
- Template Cobem2015 LatexTemplate Cobem2015 LatexDocumento10 páginasTemplate Cobem2015 LatexTemplate Cobem2015 LatexAlfredo JuniorAinda não há avaliações
- (TRADUÇÃO) 6 - ProceduresDocumento24 páginas(TRADUÇÃO) 6 - ProceduresMARCOS DIASAinda não há avaliações
- Otimização DinâmicaDocumento56 páginasOtimização DinâmicamorlockbrAinda não há avaliações
- Apostila AlgoritmoDocumento13 páginasApostila AlgoritmoMárcia100% (3)
- Mecatrônica: Teoria de ControleDocumento46 páginasMecatrônica: Teoria de ControleBelo traderAinda não há avaliações
- Algoritmo de Ordenamento Rank: Implementação em MPI Modelo Mestre EscravoDocumento2 páginasAlgoritmo de Ordenamento Rank: Implementação em MPI Modelo Mestre EscravoCarlos Henrique OliveiraAinda não há avaliações
- Simulacao de Motor CC e Controle Com PID de VelocidadeDocumento4 páginasSimulacao de Motor CC e Controle Com PID de VelocidadeJOERDSON TIAGO BATISTA DA SILVAAinda não há avaliações
- A Novel Control Method Combining Multi-Level Dimension Reduction and NSGA-II For Octane NumberDocumento6 páginasA Novel Control Method Combining Multi-Level Dimension Reduction and NSGA-II For Octane NumberWilliam Ricardo RosaAinda não há avaliações
- Controlador PID Digital Parte 2Documento17 páginasControlador PID Digital Parte 2Macedo CastroAinda não há avaliações
- Controlador de VelocidadeDocumento21 páginasControlador de VelocidadeDanteAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- 2034 - Apontamentos Programação e Algoritmia (Parte 1) - Engº Carlos MoraDocumento33 páginas2034 - Apontamentos Programação e Algoritmia (Parte 1) - Engº Carlos MoraLuís PerdigãoAinda não há avaliações
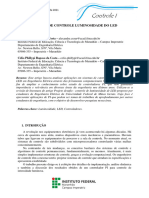
- Controle de Luminosidade de LED - Alexandre e CélioDocumento14 páginasControle de Luminosidade de LED - Alexandre e Célioalex.cesar99Ainda não há avaliações
- Exercício No 67 - Pantografo de Ferrovias de Alta VelocidadeDocumento2 páginasExercício No 67 - Pantografo de Ferrovias de Alta Velocidade9semestreAinda não há avaliações
- Lab 1Documento3 páginasLab 1Alexandre JesusAinda não há avaliações
- Aula MQRParVar 2009Documento18 páginasAula MQRParVar 2009Regis QueirozAinda não há avaliações
- Capacidade Do ProcessoDocumento12 páginasCapacidade Do ProcessoRonaldo LinaresAinda não há avaliações
- Galoa Proceedings Cobisa 2019 104021Documento7 páginasGaloa Proceedings Cobisa 2019 104021FelipeHagaAinda não há avaliações
- Trabalho PID AnalogicoDocumento9 páginasTrabalho PID AnalogicoMarcus Vinicius100% (1)
- Aula 4 - ComplexidadeAlgoritmicaDocumento12 páginasAula 4 - ComplexidadeAlgoritmicaMário SitoeAinda não há avaliações
- Controle de Servomotores CCDocumento27 páginasControle de Servomotores CCFernando Henrique G. Zucatelli100% (1)
- Rascunho Trabalho DroneDocumento10 páginasRascunho Trabalho DronePablo HenriqueAinda não há avaliações
- Algoritmo Do Gradiente Utilizando A Ferramenta MATLABDocumento19 páginasAlgoritmo Do Gradiente Utilizando A Ferramenta MATLABDiego FroesAinda não há avaliações
- Aula4 Controlador L. Das Raízes - Avanço de FaseDocumento43 páginasAula4 Controlador L. Das Raízes - Avanço de Fasemanolomay838Ainda não há avaliações
- PAA Trabalho FinalDocumento6 páginasPAA Trabalho FinalAlice CabralAinda não há avaliações
- Aula 4 - Conceitos Basicos de Capacidade de ProcessosDocumento16 páginasAula 4 - Conceitos Basicos de Capacidade de ProcessosMaiko AlmeidaAinda não há avaliações
- Prova - Processos IndustriaisDocumento3 páginasProva - Processos IndustriaisAmanda SantosAinda não há avaliações
- Projeto de Controlador Pid: (Disciplina de Controle e Automação)Documento25 páginasProjeto de Controlador Pid: (Disciplina de Controle e Automação)Kevin AugustoAinda não há avaliações
- Controlador PID PDFDocumento19 páginasControlador PID PDFWesley Henrique MacielAinda não há avaliações
- Controlador PIDDocumento19 páginasControlador PIDWesley Henrique MacielAinda não há avaliações
- Analise de AlgoritmoDocumento7 páginasAnalise de AlgoritmoADDNAinda não há avaliações
- Relatório - Projeto 1 - Root LocusDocumento27 páginasRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAAinda não há avaliações
- Controle de Processos Industriais Parte 3Documento29 páginasControle de Processos Industriais Parte 3Marcos AraujoAinda não há avaliações
- Sistema Microprocessado para Controle de Posição AngularDocumento14 páginasSistema Microprocessado para Controle de Posição AngularÉlisson RíllerAinda não há avaliações
- Controladores PID (Analógico e Digital) Aplicados em Um Motor CC - Mecatrônica Atual - Automação Industrial de Processos e ManufaturaDocumento11 páginasControladores PID (Analógico e Digital) Aplicados em Um Motor CC - Mecatrônica Atual - Automação Industrial de Processos e Manufaturaheliosmariano8350Ainda não há avaliações
- MQR - Rastreamento de ParâmetrosDocumento11 páginasMQR - Rastreamento de ParâmetrosDenis JefterAinda não há avaliações
- Trabalho1 Gabriella Maia Nantes Da SilvaDocumento6 páginasTrabalho1 Gabriella Maia Nantes Da SilvaAlan BorgesAinda não há avaliações
- Sistemas de ControleDocumento54 páginasSistemas de ControleGênesis LopesAinda não há avaliações
- Cópia de Apresentação 4 Slides - 07-06-22 - TBA-1PRISCILADocumento10 páginasCópia de Apresentação 4 Slides - 07-06-22 - TBA-1PRISCILAMonaliza SilvaAinda não há avaliações
- RELATÓRIO FINAL DE ESTÁGIO - CarolineDocumento13 páginasRELATÓRIO FINAL DE ESTÁGIO - CarolineMonaliza Silva100% (8)
- Pre-Projeto Eng de PetroleoDocumento18 páginasPre-Projeto Eng de PetroleoMonaliza SilvaAinda não há avaliações
- Universidade Cândido Mendes - Eng MecanicaDocumento38 páginasUniversidade Cândido Mendes - Eng MecanicaMonaliza SilvaAinda não há avaliações
- Universidade Cândido Mendes - Eng MecanicaDocumento38 páginasUniversidade Cândido Mendes - Eng MecanicaMonaliza SilvaAinda não há avaliações
- Fichas de Salgados CPTDocumento32 páginasFichas de Salgados CPTRegina HelenaAinda não há avaliações
- Materia Matematica Curso SoluçaoDocumento8 páginasMateria Matematica Curso SoluçaoJean LucasAinda não há avaliações
- 1 Análise Crítica Da Filosofia de WittgensteinDocumento2 páginas1 Análise Crítica Da Filosofia de WittgensteinRoberto BragaAinda não há avaliações
- QG Exercã Cios - EstequiometriaDocumento20 páginasQG Exercã Cios - EstequiometriaToni FariasAinda não há avaliações
- MATEMÁTICADocumento118 páginasMATEMÁTICASuelen SantosAinda não há avaliações
- 367891-Exercício PascalzimDocumento4 páginas367891-Exercício PascalzimDiego OliveiraAinda não há avaliações
- Aula - Dim Mancais de DeslizamentoDocumento34 páginasAula - Dim Mancais de Deslizamentohelton_bsbAinda não há avaliações
- Densimetria de Materiais GranuladoDocumento5 páginasDensimetria de Materiais GranuladoGirlane SantosAinda não há avaliações
- Exercicio - de - Fixacao Balanço de MassasDocumento1 páginaExercicio - de - Fixacao Balanço de MassasSamantha RibeiroAinda não há avaliações
- Manual Usuario - Manual DVDocumento5 páginasManual Usuario - Manual DVGisseli MontanariAinda não há avaliações
- Magia Do AmorDocumento273 páginasMagia Do AmorJoão Marques Ferreira67% (6)
- Ap Matemática 6 Série EfDocumento304 páginasAp Matemática 6 Série EfAlexandre MarianoAinda não há avaliações
- Lista de Exercícios - SoluçõesDocumento3 páginasLista de Exercícios - SoluçõesJeane Rodrigues BrederAinda não há avaliações
- Resumo - BiomecanicaDocumento9 páginasResumo - BiomecanicaSandraMorethAinda não há avaliações
- Lista de Trabalhos 4 - CiclonagemDocumento3 páginasLista de Trabalhos 4 - CiclonagemLuana Macedo100% (1)
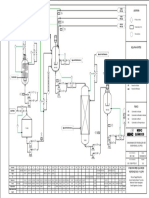
- PFD BPA Final-Páginas-1Documento1 páginaPFD BPA Final-Páginas-1Luiz Rodrigo AssisAinda não há avaliações
- 3 - Estática Dos Fluidos - 2Documento29 páginas3 - Estática Dos Fluidos - 2Eliziane LeonAinda não há avaliações
- Instalação de (SWC) Chevrolet CapitivaDocumento11 páginasInstalação de (SWC) Chevrolet CapitivaAndre LucieneAinda não há avaliações
- Como Usar A HP-50g para CalculoDocumento12 páginasComo Usar A HP-50g para CalculoEliezerAinda não há avaliações
- Unidade 2 Desenvolvimento de Software para WebDocumento8 páginasUnidade 2 Desenvolvimento de Software para WebGustavo DE PaulaAinda não há avaliações
- 001 Manual Esteira Atheltic RunnerDocumento8 páginas001 Manual Esteira Atheltic RunnerLulii RisottoAinda não há avaliações
- Destilação DiferencialDocumento17 páginasDestilação DiferencialLuis Guilherme Foresto100% (1)
- Manual Fresamento NX8Documento62 páginasManual Fresamento NX8abelmil123Ainda não há avaliações
- Mzup3 Fichas Recuperacao 2anoDocumento32 páginasMzup3 Fichas Recuperacao 2anoBeatriz Galharda de LavosAinda não há avaliações
- Automação e ControleDocumento268 páginasAutomação e ControleWASHINGTONAinda não há avaliações
- Manual Sistema DGPark WEB Rev1 PDFDocumento10 páginasManual Sistema DGPark WEB Rev1 PDFDomParking MinhaVagaAinda não há avaliações
- 7) Motores Eletricos e Geradores FalhasDocumento19 páginas7) Motores Eletricos e Geradores FalhasAntonio Rigno de SousaAinda não há avaliações
- PPR - DelineadoresDocumento1 páginaPPR - DelineadoresleticiaAinda não há avaliações
- Relatorio de Produção Magnésio MetálicoDocumento39 páginasRelatorio de Produção Magnésio MetálicoSidney OliveiraAinda não há avaliações
- Método para Bateria Por Daniel BateraDocumento31 páginasMétodo para Bateria Por Daniel BateraDaniel SilvaAinda não há avaliações
- Feynman Lectures Simplified 4A: Math for PhysicistsNo EverandFeynman Lectures Simplified 4A: Math for PhysicistsNota: 5 de 5 estrelas5/5 (4)
- Schaum's Outline of Advanced Calculus, Third EditionNo EverandSchaum's Outline of Advanced Calculus, Third EditionNota: 4 de 5 estrelas4/5 (9)
- Machine Learning for Beginners: An Introduction for Beginners, Why Machine Learning Matters Today and How Machine Learning Networks, Algorithms, Concepts and Neural Networks Really WorkNo EverandMachine Learning for Beginners: An Introduction for Beginners, Why Machine Learning Matters Today and How Machine Learning Networks, Algorithms, Concepts and Neural Networks Really WorkNota: 4.5 de 5 estrelas4.5/5 (9)
- Calculus Workbook For Dummies with Online PracticeNo EverandCalculus Workbook For Dummies with Online PracticeNota: 3.5 de 5 estrelas3.5/5 (8)
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Ainda não há avaliações
- Introductory Calculus: With Analytic Geometry and Linear AlgebraNo EverandIntroductory Calculus: With Analytic Geometry and Linear AlgebraNota: 4 de 5 estrelas4/5 (4)
- TensorFlow in 1 Day: Make your own Neural NetworkNo EverandTensorFlow in 1 Day: Make your own Neural NetworkNota: 4 de 5 estrelas4/5 (8)
- Data Structures and Algorithm Analysis in C++, Third EditionNo EverandData Structures and Algorithm Analysis in C++, Third EditionNota: 4.5 de 5 estrelas4.5/5 (7)
- Feynman Lectures Simplified 2A: Maxwell's Equations & ElectrostaticsNo EverandFeynman Lectures Simplified 2A: Maxwell's Equations & ElectrostaticsAinda não há avaliações
- Boundary Element Methods: Principles and ApplicationsNo EverandBoundary Element Methods: Principles and ApplicationsQ. DuAinda não há avaliações
- Everyday Calculus: Discovering the Hidden Math All around UsNo EverandEveryday Calculus: Discovering the Hidden Math All around UsNota: 4 de 5 estrelas4/5 (4)
- Computer Vision: Principles, Algorithms, Applications, LearningNo EverandComputer Vision: Principles, Algorithms, Applications, LearningNota: 5 de 5 estrelas5/5 (1)
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYAinda não há avaliações
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970No EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardAinda não há avaliações
- Engineering and Scientific Computations Using MATLABNo EverandEngineering and Scientific Computations Using MATLABAinda não há avaliações