Você também pode gostar
- Ufcd 0822 Gestao e Organizaao Da Informaao PDFDocumento38 páginasUfcd 0822 Gestao e Organizaao Da Informaao PDFCristinaAlegriaAinda não há avaliações
- TCC Eletrotécnica 2021Documento13 páginasTCC Eletrotécnica 2021João Vicente100% (2)
- Funcionamento Obd 2Documento86 páginasFuncionamento Obd 2Fernando Veloso100% (1)
- Relatório Técnico Escola POLITÉCNICADocumento2 páginasRelatório Técnico Escola POLITÉCNICADouglas MoreiraAinda não há avaliações
- Peugeot 206 Full MuxDocumento51 páginasPeugeot 206 Full MuxStéfano Soares de SouzaAinda não há avaliações
- Escavadeira Hidraulica DX 225 LCADocumento10 páginasEscavadeira Hidraulica DX 225 LCAEdilson RogerioAinda não há avaliações
- Apostila Automaçao ResidencialDocumento36 páginasApostila Automaçao ResidencialLana LinoAinda não há avaliações
- Silo - Tips Inversor de Freqencia VF Ps1 VF As1Documento90 páginasSilo - Tips Inversor de Freqencia VF Ps1 VF As1denis dennisAinda não há avaliações
- Modelo PAP Sistema de Agendamento Teste Covid19 v3.0 ComDSDocumento26 páginasModelo PAP Sistema de Agendamento Teste Covid19 v3.0 ComDSDory MateusAinda não há avaliações
- Modelo Relatorio PAPDocumento31 páginasModelo Relatorio PAPelisario JoseAinda não há avaliações
- Pap - 12123 - 11790 2Documento27 páginasPap - 12123 - 11790 2MarcosAinda não há avaliações
- Acionamento de Lâmpada Com o Sensor de MovimentoDocumento40 páginasAcionamento de Lâmpada Com o Sensor de MovimentoJúlio FernandesAinda não há avaliações
- Sistema de Gestão de Gás de CozinhaDocumento29 páginasSistema de Gestão de Gás de CozinhaIvânio100% (1)
- Edição Final Do TCC 2023 SGRRSDocumento48 páginasEdição Final Do TCC 2023 SGRRSLuis ManuelAinda não há avaliações
- Faculdade de Tecnologia de São Paulo: Departamento de Sistemas EletrônicosDocumento64 páginasFaculdade de Tecnologia de São Paulo: Departamento de Sistemas EletrônicosGielson VerasAinda não há avaliações
- Meu BujãoDocumento42 páginasMeu Bujãoguhtavo.fernandesAinda não há avaliações
- Monografia - M2M - COMUNICAÇÃO MÁQUINA A MÁQUINADocumento85 páginasMonografia - M2M - COMUNICAÇÃO MÁQUINA A MÁQUINAleommendesAinda não há avaliações
- SistemaDocumento27 páginasSistemaMuntinho SumboAinda não há avaliações
- TCC - Matheus Haas - ConcluídoDocumento21 páginasTCC - Matheus Haas - ConcluídoKingstone Pack LinkAinda não há avaliações
- RelatorioDocumento38 páginasRelatorioSantos ButiçaAinda não há avaliações
- MONOGRAFIADocumento26 páginasMONOGRAFIAGLOBOAinda não há avaliações
- TCC 0612 Att 5Documento35 páginasTCC 0612 Att 5NichihyouAinda não há avaliações
- Monografia - Sistema de Monitoramento Automotivo Remoto - V - FinalDocumento86 páginasMonografia - Sistema de Monitoramento Automotivo Remoto - V - Finalgustavo luizAinda não há avaliações
- Relatório (ClésioDércio)Documento31 páginasRelatório (ClésioDércio)Clesio DercioAinda não há avaliações
- 2 Angelino João FinalDocumento44 páginas2 Angelino João FinalBelarmino Edson CamumAinda não há avaliações
- Carregador Inteligente - Monografia Final PDFDocumento34 páginasCarregador Inteligente - Monografia Final PDFBruno PilzAinda não há avaliações
- Capa Dura DomoDocumento105 páginasCapa Dura DomoDanijel RenaldoAinda não há avaliações
- Edição Final Do TCC 2023 SGRRSDocumento45 páginasEdição Final Do TCC 2023 SGRRSLuis ManuelAinda não há avaliações
- Cype Calculo de Ict PDFDocumento481 páginasCype Calculo de Ict PDFberkut37Ainda não há avaliações
- Grupo 4 - Estufa Hidropónica - Final (Errata)Documento77 páginasGrupo 4 - Estufa Hidropónica - Final (Errata)tomascro2912Ainda não há avaliações
- PropostaTC MateusNudelmann ViniciusNudelmannDocumento31 páginasPropostaTC MateusNudelmann ViniciusNudelmannVinicius NudelmannAinda não há avaliações
- Trabalho LeopardoDocumento18 páginasTrabalho Leopardosergio josimarAinda não há avaliações
- Hidrometro Eletronico ResidencialDocumento48 páginasHidrometro Eletronico ResidencialreginaldoanicetoAinda não há avaliações
- TCC - CBA-IT Marcos Silva - NFC Um Novo Paradigma Da TIC v01.00Documento91 páginasTCC - CBA-IT Marcos Silva - NFC Um Novo Paradigma Da TIC v01.00Marcos Rodrigues da SilvaAinda não há avaliações
- Dimensionamento de Sistema MicroondaDocumento57 páginasDimensionamento de Sistema MicroondaWailate Gento Amisse Canela100% (1)
- Trabalho FinalDocumento65 páginasTrabalho FinalDE MAFIAAinda não há avaliações
- Monografia EtecDocumento22 páginasMonografia EtecEduMacielCamargoAinda não há avaliações
- Carrinho Controlado Por Celular AndroidDocumento29 páginasCarrinho Controlado Por Celular AndroidlenhajosAinda não há avaliações
- Relatorio V2.2primeira Parte Quase ConcluidaDocumento62 páginasRelatorio V2.2primeira Parte Quase ConcluidamarcomanuelsilvapereiraAinda não há avaliações
- CorrigidoDocumento13 páginasCorrigidoAnisio ManhiçaAinda não há avaliações
- Faculdade de Americana Curso de Engenharia Elétrica: Smart Water MeterDocumento43 páginasFaculdade de Americana Curso de Engenharia Elétrica: Smart Water MeterretratosfaladoAinda não há avaliações
- Manual Do Programa CEES - FinalDocumento27 páginasManual Do Programa CEES - FinalUbaldo FernandoAinda não há avaliações
- TL 2016 AgnaldosamuelDocumento77 páginasTL 2016 AgnaldosamuelMrmouzinhoAinda não há avaliações
- Retificado REDES INDUSTRIAIS FIELDBUS1Documento27 páginasRetificado REDES INDUSTRIAIS FIELDBUS1Francisco PedroAinda não há avaliações
- Fundamentos de Eletronica e Eletronica A PDFDocumento67 páginasFundamentos de Eletronica e Eletronica A PDFcasagrandeAinda não há avaliações
- Universidade Paulista - Unip Ead Projeto Integrado MultidisciplinarDocumento28 páginasUniversidade Paulista - Unip Ead Projeto Integrado MultidisciplinarGabriel GergyeAinda não há avaliações
- Manual Do ProdutoDocumento42 páginasManual Do Produtoalessandro.scamposAinda não há avaliações
- RelatorioDocumento17 páginasRelatorioWilsadas Baby YNAinda não há avaliações
- TCC Do Francisco de BritoDocumento43 páginasTCC Do Francisco de BritoLacoAinda não há avaliações
- Restaurante LivroDocumento35 páginasRestaurante LivroLoidAinda não há avaliações
- Trabalho Do Fim Do Curso MÁRIO SISTEMA DE IRRIGAÇÃO AUTOMÁTICO.Documento42 páginasTrabalho Do Fim Do Curso MÁRIO SISTEMA DE IRRIGAÇÃO AUTOMÁTICO.Mário Domingos TchipendaAinda não há avaliações
- Automação Residencial Com A Utilização de Raspberry PiDocumento43 páginasAutomação Residencial Com A Utilização de Raspberry PiJoão AírtonAinda não há avaliações
- Pré Projecto PAPDocumento15 páginasPré Projecto PAPFernando MAinda não há avaliações
- Painel LedDocumento31 páginasPainel LedSantos ButiçaAinda não há avaliações
- António Matacuene Paulo Manjasse: Welwitschea Da Inelsiawill NoraDocumento16 páginasAntónio Matacuene Paulo Manjasse: Welwitschea Da Inelsiawill NoraGildo CasteloAinda não há avaliações
- Projecto Final Rede de Simaforo Inteligente Rv001 13-06-2016Documento81 páginasProjecto Final Rede de Simaforo Inteligente Rv001 13-06-2016miguelAinda não há avaliações
- Relatorio de Estagio A Empresa VeigaDocumento22 páginasRelatorio de Estagio A Empresa VeigagersinhoAinda não há avaliações
- Relatório e Contas de 2013 PDFDocumento137 páginasRelatório e Contas de 2013 PDFJeunetAinda não há avaliações
- Nova Norma IluminaçãoDocumento44 páginasNova Norma IluminaçãoHervanda Vissolela100% (1)
- Sadft 123Documento40 páginasSadft 123LuTango de DeusAinda não há avaliações
- TCC - Sistema de Irrigação Inteligente-2023Documento24 páginasTCC - Sistema de Irrigação Inteligente-2023gabihipolito27Ainda não há avaliações
- Dissertac 807 A 771 o AnaFilesDocumento48 páginasDissertac 807 A 771 o AnaFilesMonica SousaAinda não há avaliações
- Monitorando Uv No Arduino Com Sintetizador De Voz Programado No Visual C#No EverandMonitorando Uv No Arduino Com Sintetizador De Voz Programado No Visual C#Ainda não há avaliações
- Monitorando Uv No Pic Com Sintetizador De Voz Programado No Visual BasicNo EverandMonitorando Uv No Pic Com Sintetizador De Voz Programado No Visual BasicAinda não há avaliações
- Conexao BD Java 23Documento2 páginasConexao BD Java 23Maiv Manuel AugustoAinda não há avaliações
- NALT BD ÁlvaroDocumento14 páginasNALT BD ÁlvaroMaiv Manuel AugustoAinda não há avaliações
- Na UMLDocumento11 páginasNa UMLMaiv Manuel AugustoAinda não há avaliações
- Tabela NNDocumento5 páginasTabela NNMaiv Manuel AugustoAinda não há avaliações
- ÍndiceDocumento20 páginasÍndiceMaiv Manuel AugustoAinda não há avaliações
- Curriculum VitaeDocumento2 páginasCurriculum VitaeMaiv Manuel AugustoAinda não há avaliações
- Curriculum VitaeDocumento1 páginaCurriculum VitaeMaiv Manuel AugustoAinda não há avaliações
- Estudo de Caso - Inclusão Digital e Inteligência Artificial Na EducaçãoDocumento26 páginasEstudo de Caso - Inclusão Digital e Inteligência Artificial Na EducaçãomaiswaloresAinda não há avaliações
- Apostila Excel BásicoDocumento7 páginasApostila Excel BásicoColégio UP QIAinda não há avaliações
- 1 - Introdução À Computação em NuvemDocumento138 páginas1 - Introdução À Computação em NuvemMarcelo SouzaAinda não há avaliações
- Live Stremimg ATVDocumento16 páginasLive Stremimg ATVCarlos PapafinaAinda não há avaliações
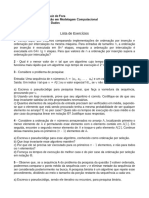
- Lista 2 ERE 20213Documento2 páginasLista 2 ERE 20213Arthus RezendeAinda não há avaliações
- RTAC002448Documento56 páginasRTAC002448miguelestrela531Ainda não há avaliações
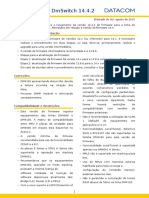
- Release Notes DmSwitch 14.4.2Documento3 páginasRelease Notes DmSwitch 14.4.2360Ainda não há avaliações
- Lista2 2Documento2 páginasLista2 2Flávio ÁvilahAinda não há avaliações
- Aula 1 - Álgebra LinearDocumento31 páginasAula 1 - Álgebra LinearMillena TorresAinda não há avaliações
- D2ip c2 pdf-2023 Todos Correcoes Revisao-Sei-52402-002585 2023-78-2Documento478 páginasD2ip c2 pdf-2023 Todos Correcoes Revisao-Sei-52402-002585 2023-78-2Kelby1981Ainda não há avaliações
- Modelo de Política de Privacidade e Segurança (Pronto para Usar)Documento5 páginasModelo de Política de Privacidade e Segurança (Pronto para Usar)Rafael RezendeAinda não há avaliações
- Nova Cobrança - Manual de Integração v1.4Documento58 páginasNova Cobrança - Manual de Integração v1.4angelrfeAinda não há avaliações
- BG 0322019Documento67 páginasBG 0322019Julio CesarAinda não há avaliações
- Cartuchos Recarregaveis - OutrosDocumento6 páginasCartuchos Recarregaveis - OutrosFelipe CintraAinda não há avaliações
- Tecnologia 9ºBDocumento2 páginasTecnologia 9ºBAline DouradoAinda não há avaliações
- Caracteres Especiais WindowsDocumento2 páginasCaracteres Especiais WindowsDiogo Stancke0% (1)
- Fil - 0110-Importação de Regiões - AutoCAD - GeoStudioDocumento12 páginasFil - 0110-Importação de Regiões - AutoCAD - GeoStudioCleitton PereiraAinda não há avaliações
- Arq hp6Documento52 páginasArq hp6Bruno MelloAinda não há avaliações
- Comtemporany Mythos 1 - Hades - Carly SpadeDocumento284 páginasComtemporany Mythos 1 - Hades - Carly Spadecarlaleal077Ainda não há avaliações
- Software InfraestruturaDocumento13 páginasSoftware InfraestruturaNaoki YokoyamaAinda não há avaliações
- Portfolio Redes de ComputadoresDocumento9 páginasPortfolio Redes de ComputadorespossentimelissaAinda não há avaliações
- Currículo DesenvolvedorDocumento2 páginasCurrículo DesenvolvedorHelder JuniorAinda não há avaliações
- Manual PCM 100Documento14 páginasManual PCM 100emersonAinda não há avaliações
- 9 de Exe Ins PNT MRX r00Documento1 página9 de Exe Ins PNT MRX r00Andressa BispoAinda não há avaliações
- Exercícios Sobre Monômio, Binômio e PolinômioDocumento2 páginasExercícios Sobre Monômio, Binômio e PolinômioDouglas José SilvaAinda não há avaliações
- Catálogo Analisador QEE G4K Blackbox 2011 PDFDocumento6 páginasCatálogo Analisador QEE G4K Blackbox 2011 PDFAdelmoKarigAinda não há avaliações