Você também pode gostar
- UC SDI Aula3 Circuitos Combinacionais REV1 (TERÇA)Documento28 páginasUC SDI Aula3 Circuitos Combinacionais REV1 (TERÇA)jor marketingAinda não há avaliações
- UC SDI Aula3 Circuitos CombinacionaisDocumento23 páginasUC SDI Aula3 Circuitos Combinacionaisjor marketingAinda não há avaliações
- Lista 2Documento6 páginasLista 2El AxoAinda não há avaliações
- Folhas Teoria Grafos MD 23 - 24Documento20 páginasFolhas Teoria Grafos MD 23 - 24brandonAinda não há avaliações
- 1 - Lab - Linguagem LadderDocumento2 páginas1 - Lab - Linguagem LadderJoão JoséAinda não há avaliações
- FlipFlop Tipo RS SíncronoDocumento2 páginasFlipFlop Tipo RS SíncronoarturvilaresAinda não há avaliações
- Formulário Excel Codificado FullDocumento30 páginasFormulário Excel Codificado Fulljefferson souzaAinda não há avaliações
- Build Bárbaro - Ordem Paranormal RPGDocumento2 páginasBuild Bárbaro - Ordem Paranormal RPGnicolas silvaAinda não há avaliações
- Atividade 3Documento3 páginasAtividade 3Um nome InteligenteAinda não há avaliações
- FichaDocumento1 páginaFichasaf ofcAinda não há avaliações
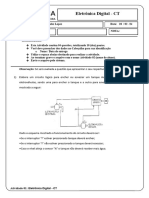
- Relatório Eletrônica DigitalDocumento8 páginasRelatório Eletrônica DigitalFlavia Rodrigues GabrielAinda não há avaliações
- 1aprova 0925 1 2001Documento1 página1aprova 0925 1 2001Física MatemáticaAinda não há avaliações
- MadraDocumento2 páginasMadraLary ChanAinda não há avaliações
- Atividade de Pesquisa 01Documento6 páginasAtividade de Pesquisa 01Juliano MartinsAinda não há avaliações
- Ficha PDFDocumento1 páginaFicha PDFpKx56 14Ainda não há avaliações
- AtividadesDocumento1 páginaAtividadesarthurvasconcelos707Ainda não há avaliações
- SKJDCN KJSXCDocumento19 páginasSKJDCN KJSXCLeordesAinda não há avaliações
- Atividade 3Documento3 páginasAtividade 3Guilherme Ramos da SilvaAinda não há avaliações
- Lista 5Documento1 páginaLista 5ClaudioAinda não há avaliações
- FichaDocumento1 páginaFichamarianeacaua2004Ainda não há avaliações
- Ficha AlexanderDocumento2 páginasFicha AlexanderSamyrAinda não há avaliações
- Eletrônica DigitalDocumento5 páginasEletrônica DigitalGeorge MaxwellAinda não há avaliações
- FichaDocumento1 páginaFichaGank FariaAinda não há avaliações
- Atividade de Pesquisa 01Documento7 páginasAtividade de Pesquisa 01celsotkAinda não há avaliações
- Ark Humano Artista Bardo 1 Hyninn: Criar Ilusão Imagem EspelhadaDocumento1 páginaArk Humano Artista Bardo 1 Hyninn: Criar Ilusão Imagem EspelhadaTadeu MaltaAinda não há avaliações
- Ficha Jeremias - Ocultista Investido OPDocumento2 páginasFicha Jeremias - Ocultista Investido OPPedroAinda não há avaliações
- Avaliacao de TreinamentoDocumento27 páginasAvaliacao de TreinamentoFernando RodaAinda não há avaliações
- 1 Registos de AvaliacaoDocumento11 páginas1 Registos de AvaliacaoVânia NunesAinda não há avaliações
- Ficha ImmanuelDocumento2 páginasFicha ImmanuelSamyrAinda não há avaliações
- Helena FichaDocumento1 páginaHelena FichaYuriAinda não há avaliações
- Atividade 02 - DigitalDocumento6 páginasAtividade 02 - Digitalrennygonzalez2557Ainda não há avaliações
- Mão Direita - Cordas AbertasDocumento1 páginaMão Direita - Cordas AbertasharmonicafalcaoAinda não há avaliações
- Avaliacao de TreinamentoDocumento27 páginasAvaliacao de TreinamentoLORYZE CASTILHOAinda não há avaliações
- Rastreamento Holistico Da Saude VM (4) .PDF RespostasDocumento3 páginasRastreamento Holistico Da Saude VM (4) .PDF RespostasADRIANO SANTOSAinda não há avaliações
- 1 Atividade ComplemenntarDocumento4 páginas1 Atividade ComplemenntarBianca FalcãoAinda não há avaliações
- Kyo TakaDocumento2 páginasKyo Takarafaelkiyotaka120Ainda não há avaliações
- 8ºB Oral Presentations 21:22Documento1 página8ºB Oral Presentations 21:22pduarte_7Ainda não há avaliações
- Build Ocultista Suporte - Ordem Paranormal RPGDocumento2 páginasBuild Ocultista Suporte - Ordem Paranormal RPGNoobmaster69 Master69Ainda não há avaliações
- Grelha 7 Un4Documento1 páginaGrelha 7 Un4Telmo NunesAinda não há avaliações
- Tabela de MensuraçõesDocumento9 páginasTabela de MensuraçõesElis AquinoAinda não há avaliações
- Cmar7 Grelha Aval U1 CDocumento2 páginasCmar7 Grelha Aval U1 CIsabel rodriguesAinda não há avaliações
- PT5 TesteB Outubro2023 Grelha ClassificacaoDocumento1 páginaPT5 TesteB Outubro2023 Grelha ClassificacaopicatitaAinda não há avaliações
- Prova 1Documento21 páginasProva 1ENERGOSAinda não há avaliações
- ExerciciosALGA 21-22 Cap1-6Documento37 páginasExerciciosALGA 21-22 Cap1-6Joana SoaresAinda não há avaliações
- Build Diplomata - Ordem Paranormal RPGDocumento2 páginasBuild Diplomata - Ordem Paranormal RPGcristiano Rodrigues FernandesAinda não há avaliações
- Operacoes ElementaresDocumento8 páginasOperacoes ElementaresJB3261Ainda não há avaliações
- Planilha Emprestimo de LivrosDocumento2 páginasPlanilha Emprestimo de Livrosguilhermenogueira.2024Ainda não há avaliações
- Cmar7 Grelha Aval U1 ADocumento2 páginasCmar7 Grelha Aval U1 AIsabel rodriguesAinda não há avaliações
- Cthulhu Pulp - Ficha em Portugues - AutoCalc FinalDocumento2 páginasCthulhu Pulp - Ficha em Portugues - AutoCalc FinalVinicius RomaoAinda não há avaliações
- Ficha Da NeriDocumento2 páginasFicha Da NeriJames HWAinda não há avaliações
- Ficha Mass Effect RPGDocumento3 páginasFicha Mass Effect RPGBlake FerreiraAinda não há avaliações
- Grelhga av7EVae - Pcid7 - Grelha - Avaliacao - PortefolioDocumento2 páginasGrelhga av7EVae - Pcid7 - Grelha - Avaliacao - PortefolioLiliana BritesAinda não há avaliações
- Calculo Da Ponte de MacarraoDocumento2 páginasCalculo Da Ponte de MacarraoIranildo Junio Camapum BrandaoAinda não há avaliações
- Grelha - Teste 6 - 10.ºDocumento3 páginasGrelha - Teste 6 - 10.ºPilar AfoitoAinda não há avaliações
- Ramon-Área de Polígonos Irregulares (Método de Gauss)Documento3 páginasRamon-Área de Polígonos Irregulares (Método de Gauss)ramon carmeloAinda não há avaliações
- Hanna FichaDocumento2 páginasHanna FichagustoAinda não há avaliações
- Joaquim 10%Documento2 páginasJoaquim 10%Christian LucasAinda não há avaliações
- Níveis de Estoque e Gasto DiárioDocumento8 páginasNíveis de Estoque e Gasto Diáriomarcellenutri.01Ainda não há avaliações
- III - Momento Angular: Mário Ernesto Giroldo Valerio José Joatan Rodrigues JúniorDocumento72 páginasIII - Momento Angular: Mário Ernesto Giroldo Valerio José Joatan Rodrigues JúniorBen SottyAinda não há avaliações
- Apostila Teo CDDocumento345 páginasApostila Teo CDNayure MatiasAinda não há avaliações
- Livro Unico PDFDocumento220 páginasLivro Unico PDFEric Morais de Oliveira100% (1)
- Aula 1 OKDocumento16 páginasAula 1 OKfpreisAinda não há avaliações
- Algoritmos e Estruturas de DadosDocumento48 páginasAlgoritmos e Estruturas de DadosfpreisAinda não há avaliações
- ANALISE E PROCESSAMENTO DE SINAIS NotasDocumento130 páginasANALISE E PROCESSAMENTO DE SINAIS NotasfpreisAinda não há avaliações
- Nuvi 3597 OM PTDocumento24 páginasNuvi 3597 OM PTfpreisAinda não há avaliações
- Fonetica Forense 2008Documento24 páginasFonetica Forense 2008fpreisAinda não há avaliações
- Solu C Ao em Espa Co de Estado: C ° Reinaldo M. Palhares Pag.1 Teoria de Sistemas Lineares - Aula 11Documento34 páginasSolu C Ao em Espa Co de Estado: C ° Reinaldo M. Palhares Pag.1 Teoria de Sistemas Lineares - Aula 11fpreisAinda não há avaliações
- Filtros RL RC e RLCDocumento6 páginasFiltros RL RC e RLCfpreisAinda não há avaliações
- CC-codificacao DadosDocumento10 páginasCC-codificacao DadosfpreisAinda não há avaliações
- Realimenta C Ao de Estado para Sistemas SISODocumento45 páginasRealimenta C Ao de Estado para Sistemas SISOfpreisAinda não há avaliações
- Realimenta C Ao de Estado: Sistemas MIMO Estimadores de Estado: Sistemas MIMODocumento30 páginasRealimenta C Ao de Estado: Sistemas MIMO Estimadores de Estado: Sistemas MIMOfpreisAinda não há avaliações
- A Fonetica Forense Na Producao de ProvaDocumento27 páginasA Fonetica Forense Na Producao de ProvafpreisAinda não há avaliações
- Observabilidade, Decomposi C Ao Can OnicaDocumento36 páginasObservabilidade, Decomposi C Ao Can OnicafpreisAinda não há avaliações
- EstabilidadeDocumento24 páginasEstabilidadefpreisAinda não há avaliações
- Estabilidade para Sistemas LVT: Estabilidade de Sistemas Variante No Tempo Estabilidade Da Resposta 'A Entrada NulaDocumento13 páginasEstabilidade para Sistemas LVT: Estabilidade de Sistemas Variante No Tempo Estabilidade Da Resposta 'A Entrada NulafpreisAinda não há avaliações
- Algebra Linear: Ortonormaliza C Ao Sistema de Equa C Oes LinearesDocumento38 páginasAlgebra Linear: Ortonormaliza C Ao Sistema de Equa C Oes LinearesfpreisAinda não há avaliações
- Generalidades... : Tipificando Sistemas Equa C Oes Diferenciais Equa C Oes A Diferen CaDocumento31 páginasGeneralidades... : Tipificando Sistemas Equa C Oes Diferenciais Equa C Oes A Diferen CafpreisAinda não há avaliações
- Estabilidade InternaDocumento31 páginasEstabilidade InternafpreisAinda não há avaliações
- Aula5 TSLDocumento37 páginasAula5 TSLfpreisAinda não há avaliações
- Matrizes e Linearidade: C ° Reinaldo M. Palhares Pag.1 Teoria de Sistemas Lineares - Aula 1Documento43 páginasMatrizes e Linearidade: C ° Reinaldo M. Palhares Pag.1 Teoria de Sistemas Lineares - Aula 1fpreisAinda não há avaliações
- Aula8 TSLDocumento23 páginasAula8 TSLfpreisAinda não há avaliações
- Micros 00Documento24 páginasMicros 00fpreisAinda não há avaliações
- Aula0 TSLDocumento18 páginasAula0 TSLfpreisAinda não há avaliações
- Microprocessadores: TópicosDocumento41 páginasMicroprocessadores: TópicosfpreisAinda não há avaliações
- Micros 03Documento14 páginasMicros 03fpreisAinda não há avaliações
- Micros 04Documento14 páginasMicros 04fpreisAinda não há avaliações
- Micros 02Documento53 páginasMicros 02fpreisAinda não há avaliações
- AAM Antenas AnelDocumento16 páginasAAM Antenas AnelfpreisAinda não há avaliações
- FATURA Claro 2023 306541723Documento3 páginasFATURA Claro 2023 306541723patriciamdlaraAinda não há avaliações
- Casamento Informacoes GeraisDocumento3 páginasCasamento Informacoes GeraisMarcelo CarreraAinda não há avaliações
- Concurso Público: EDITAL #005/2010Documento53 páginasConcurso Público: EDITAL #005/2010b4t3dorAinda não há avaliações
- Dara - Rosemary - PB+H-1750-1Documento4 páginasDara - Rosemary - PB+H-1750-1Shemina Romano Diniz FonsecaAinda não há avaliações
- Esquema Eletrico Peugeot 306Documento35 páginasEsquema Eletrico Peugeot 306Alcindo Taro80% (15)
- Hibridacao 3cerao FMMDocumento6 páginasHibridacao 3cerao FMMifbenjitrueloginAinda não há avaliações
- Vamos Conversar - Elisama SantosDocumento126 páginasVamos Conversar - Elisama SantosPatrícia Andrade100% (2)
- Aululária - Plauto PDFDocumento28 páginasAululária - Plauto PDFGabriela VarelaAinda não há avaliações
- Revisao 1 - Curso Positivo - FinalDocumento200 páginasRevisao 1 - Curso Positivo - FinalMarina Franzoi PereiraAinda não há avaliações
- Relatório 02 - Sistema de AlimentaçãoDocumento10 páginasRelatório 02 - Sistema de AlimentaçãoBruno LimaAinda não há avaliações
- Aula Correntes Zilda 2013 Completa PDFDocumento43 páginasAula Correntes Zilda 2013 Completa PDFLuis Otávio Moretti100% (1)
- Estudo de CasoDocumento1 páginaEstudo de CasoJéssicaTavaresAinda não há avaliações
- Relatório Final Do Estagio I PDFDocumento11 páginasRelatório Final Do Estagio I PDFGessicaAinda não há avaliações
- Da I Rita Preto Sebenta de Direito Administrativo I Das Auals Da DR Fernanda Paula 20152016Documento81 páginasDa I Rita Preto Sebenta de Direito Administrativo I Das Auals Da DR Fernanda Paula 20152016Margarida MarquesAinda não há avaliações
- Aula 9 - Quadriláteros Geometria 6 AnoDocumento3 páginasAula 9 - Quadriláteros Geometria 6 AnoJéssica NevesAinda não há avaliações
- Projeto Elétrico PiscinaDocumento13 páginasProjeto Elétrico Piscinapolarf6Ainda não há avaliações
- Antagonistas de Receptores Da Angiotensina IIDocumento1 páginaAntagonistas de Receptores Da Angiotensina IIEduardo VieiraAinda não há avaliações
- 1 - Capitalismo Socialismo Guerra Fria GlobalizaçãoDocumento56 páginas1 - Capitalismo Socialismo Guerra Fria Globalizaçãokeilinha_narutoAinda não há avaliações
- Script Banho e TosaDocumento3 páginasScript Banho e TosarafaelsilvacursoshotmailcomAinda não há avaliações
- Cintura PelvicaDocumento3 páginasCintura PelvicaTaynara BissAinda não há avaliações
- IAGODocumento1 páginaIAGOJoão Paulo MocellinAinda não há avaliações
- TCC FinalizadoDocumento40 páginasTCC FinalizadoLindolfoOliveiraAinda não há avaliações
- 2 - AtomísticaDocumento13 páginas2 - AtomísticadennersilvaAinda não há avaliações
- 08-Projeto de MolasDocumento50 páginas08-Projeto de MolasFelipe Frizon100% (1)
- Manual Aps Aluno SPP Unip - 2014 - 2Documento11 páginasManual Aps Aluno SPP Unip - 2014 - 2Barão BaronesAinda não há avaliações
- Check-List NP en ISO 9001-2015Documento54 páginasCheck-List NP en ISO 9001-2015Anonymous 3sOtS4Uvqm86% (7)
- A Arte Da MassagemDocumento16 páginasA Arte Da MassagemAlexandra AzevedoAinda não há avaliações
- ArquivoDocumento1 páginaArquivoCharlim SabaraAinda não há avaliações
- Roteiro Pratico Virtual 6 - Lei de Ohm e Resistência Interna de Uma PilhaDocumento4 páginasRoteiro Pratico Virtual 6 - Lei de Ohm e Resistência Interna de Uma PilhaRobério Lourenço do NascimentoAinda não há avaliações
- Cisnormatividade e Passabilidade - Deslocamentos e Diferenças Nas Narrativas de Pessoas Trans PDFDocumento22 páginasCisnormatividade e Passabilidade - Deslocamentos e Diferenças Nas Narrativas de Pessoas Trans PDFWenderson SilvaAinda não há avaliações