Você também pode gostar
- Processo Seletivo SiSU 2017 - Lista de Convocados para Engenharia de Alimentos UFRNDocumento270 páginasProcesso Seletivo SiSU 2017 - Lista de Convocados para Engenharia de Alimentos UFRNLaffitte RodriguesAinda não há avaliações
- Lista de exercícios de distribuições discretasDocumento5 páginasLista de exercícios de distribuições discretasanon_830438701Ainda não há avaliações
- Modelos Matemáticos: Despoluição de Lagoas e Digestão de RuminantesDocumento36 páginasModelos Matemáticos: Despoluição de Lagoas e Digestão de RuminantessilvaAinda não há avaliações
- 1.1 O Que É AntropologiaDocumento6 páginas1.1 O Que É AntropologiaRafaelCassol0% (1)
- PSS Pará convoca professores para vagas no ensino regularDocumento14 páginasPSS Pará convoca professores para vagas no ensino regularPuppys BaiorinAinda não há avaliações
- Lista Semana 1Documento6 páginasLista Semana 1RODRIGO CAMPOS CABRAL DE MENEZES100% (1)
- LPA Estrutura DecisãoDocumento9 páginasLPA Estrutura Decisãoanon_704768291Ainda não há avaliações
- Fazer Teste HIDRAULICA GERALDocumento5 páginasFazer Teste HIDRAULICA GERALanderson bheringAinda não há avaliações
- 031 Concurso REIT Edital Nº 022014 PDFDocumento120 páginas031 Concurso REIT Edital Nº 022014 PDFTiago CatuxoAinda não há avaliações
- Redes de Distribuicao - Capitulo 9Documento74 páginasRedes de Distribuicao - Capitulo 9Riaj Li0% (1)
- Eletricidade - Questionário IDocumento4 páginasEletricidade - Questionário IRONE OLIVEIRA COUTOAinda não há avaliações
- Forças e movimento em questões de físicaDocumento5 páginasForças e movimento em questões de físicaRaphaela FerreiraAinda não há avaliações
- Simulado Eletricista AvançadoDocumento27 páginasSimulado Eletricista AvançadoAlyson de Lima PratesAinda não há avaliações
- Lista Convocacao Cotas 2 Chamada 19 02 2018 PDFDocumento711 páginasLista Convocacao Cotas 2 Chamada 19 02 2018 PDFIsaak FelipeAinda não há avaliações
- Tensões em estruturas de aço e deslocamentos em barras mecânicasDocumento4 páginasTensões em estruturas de aço e deslocamentos em barras mecânicasHeder RezendeAinda não há avaliações
- Comportamento PVT Substâncias PurasDocumento33 páginasComportamento PVT Substâncias PurasEdmilson FaustinoAinda não há avaliações
- Slides - Lei de OHMDocumento32 páginasSlides - Lei de OHMfernando miguel100% (1)
- 1 - Lista de Exercícios - Planejamento de Transportes - 2 ProvaDocumento3 páginas1 - Lista de Exercícios - Planejamento de Transportes - 2 ProvaDeimes AlifAinda não há avaliações
- Diário Oficial da Bahia publica classificação de concursos públicosDocumento72 páginasDiário Oficial da Bahia publica classificação de concursos públicosMax NunesAinda não há avaliações
- AP4-METODOS COMPUTACIONAIS - Jéssica CunhaDocumento7 páginasAP4-METODOS COMPUTACIONAIS - Jéssica CunhaMarvin Martins Dos SantosAinda não há avaliações
- Atividade Semestral Compilado para 19 Do 10 de 2020 PEDRODocumento9 páginasAtividade Semestral Compilado para 19 Do 10 de 2020 PEDROAndrea RebeloAinda não há avaliações
- Forças eletrostáticas entre cargasDocumento9 páginasForças eletrostáticas entre cargasalliprandiniAinda não há avaliações
- Aula 3 para DanielDocumento54 páginasAula 3 para DanielvnevesAinda não há avaliações
- Atividade Fenômenos de Transporte 6Documento2 páginasAtividade Fenômenos de Transporte 6JefersonBrumAinda não há avaliações
- Aula - 05 - Radiologia - Módulo I - Matematica AplicadaDocumento27 páginasAula - 05 - Radiologia - Módulo I - Matematica AplicadaReginaldo CamposAinda não há avaliações
- Caracterização dos resíduos de madeiraDocumento3 páginasCaracterização dos resíduos de madeirakaiquekaiquekaique100% (2)
- Telecurso 2000 - Matemática 26Documento7 páginasTelecurso 2000 - Matemática 26Matematica TCAinda não há avaliações
- UNED SERRA Instrumentação Módulo VazãoDocumento49 páginasUNED SERRA Instrumentação Módulo VazãoppatrickkkAinda não há avaliações
- Circuito Série e ParaleloDocumento6 páginasCircuito Série e Paraleloandersonlima21Ainda não há avaliações
- Amplificadores de Pequenos Sinais Com Transístor BipolarDocumento21 páginasAmplificadores de Pequenos Sinais Com Transístor BipolarPaulo CavalcanteAinda não há avaliações
- IT 22-2019 - Hidrantes e Mangotinhos - Parte 02 - 01Documento11 páginasIT 22-2019 - Hidrantes e Mangotinhos - Parte 02 - 01Luiz GabrielAinda não há avaliações
- As mudanças climáticas e seus impactos no setor elétrico brasileiroDocumento15 páginasAs mudanças climáticas e seus impactos no setor elétrico brasileirowindowAinda não há avaliações
- Relatório de Fis Exp 2 - MultímetroDocumento10 páginasRelatório de Fis Exp 2 - MultímetroLaíse SílviaAinda não há avaliações
- Exercício1 Descritiva GabaritoDocumento19 páginasExercício1 Descritiva GabaritoamdlobatoAinda não há avaliações
- Reynolds PDFDocumento14 páginasReynolds PDFEdmilJvDomsCGAinda não há avaliações
- 1 - IntroduçãoDocumento15 páginas1 - IntroduçãoLatasha Bell50% (2)
- Determinação da vazão de vertedor de parede espessaDocumento2 páginasDeterminação da vazão de vertedor de parede espessaDjair FelixAinda não há avaliações
- Movimento Retilíneo Uniformemente AceleradoDocumento5 páginasMovimento Retilíneo Uniformemente AceleradoCristiane MouraAinda não há avaliações
- 5 - Conversor CC-CC - Boost - 2021-2Documento43 páginas5 - Conversor CC-CC - Boost - 2021-2Elétrica UFU RacingAinda não há avaliações
- Unid 4 - Maquinas AssincronasDocumento24 páginasUnid 4 - Maquinas AssincronasWagner Gomes de SouzaAinda não há avaliações
- Aula 5 - DivisoresDocumento23 páginasAula 5 - DivisoresElídio PedroAinda não há avaliações
- Análise de Circuitos Eletrônicos AvançadosDocumento44 páginasAnálise de Circuitos Eletrônicos Avançadoswagner de lima santosAinda não há avaliações
- Aula 16 - Conversor Buck-BoostDocumento12 páginasAula 16 - Conversor Buck-BoostjhsttAinda não há avaliações
- Aula 05 - Análise Do Volume de Controle Utilizando EnergiaDocumento34 páginasAula 05 - Análise Do Volume de Controle Utilizando EnergiaAmanda HenriquesAinda não há avaliações
- Reatores 1Documento183 páginasReatores 1Mariah ToledoAinda não há avaliações
- Amplificador operacional: origem, histórico, circuitos e aplicaçõesDocumento14 páginasAmplificador operacional: origem, histórico, circuitos e aplicaçõesWeslley GomesAinda não há avaliações
- DC-CA InverterDocumento34 páginasDC-CA InverterSaullu RomeuAinda não há avaliações
- Aula03 Circuito - RL 2023Documento14 páginasAula03 Circuito - RL 2023Aline OliveiraAinda não há avaliações
- (Anci@Apr01) Dimmer IIDocumento59 páginas(Anci@Apr01) Dimmer IIalexsandergabriel.369Ainda não há avaliações
- Aula 4 AmpOp1Documento23 páginasAula 4 AmpOp1Ricardo Frangiosi de MouraAinda não há avaliações
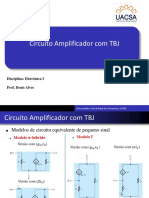
- Circuito Amplificador com TBJ: Modelos e CaracterísticasDocumento21 páginasCircuito Amplificador com TBJ: Modelos e CaracterísticasThiago ReisAinda não há avaliações
- Aula 03 - Perda de CargaDocumento12 páginasAula 03 - Perda de CargaVitor BoffAinda não há avaliações
- Aula 6 - ASP IIDocumento37 páginasAula 6 - ASP IIfaraujorafaelAinda não há avaliações
- AULA 13 Regime Permantente Senoidal 2019-1Documento28 páginasAULA 13 Regime Permantente Senoidal 2019-1Icaro MoraisAinda não há avaliações
- Transmissão Calor AletasDocumento12 páginasTransmissão Calor AletasRenata OliveiraAinda não há avaliações
- A 02 - Retificadores - Meia OndaDocumento24 páginasA 02 - Retificadores - Meia OndaAlex Sandro BoroskiAinda não há avaliações
- Circuito SCR CA-CC com Rede RC DefasadoraDocumento22 páginasCircuito SCR CA-CC com Rede RC DefasadoraAndré BertoniAinda não há avaliações
- Circuitos RC - Carregando CapacitorDocumento22 páginasCircuitos RC - Carregando Capacitorwaldo rodriguesAinda não há avaliações
- Cálculo de Reatores CSTRDocumento12 páginasCálculo de Reatores CSTRIzabelle Melo100% (1)
- 2ª aulaDocumento30 páginas2ª aulamelissa.senaAinda não há avaliações
- Sem TítuloDocumento12 páginasSem TítuloIgor ChissicoAinda não há avaliações
- Guia de segurança em primeiro lugar para apresentação de 30 minutos sobre mute de microfoneDocumento38 páginasGuia de segurança em primeiro lugar para apresentação de 30 minutos sobre mute de microfonealex totiAinda não há avaliações
- Circuito RLC em série: Resposta em frequênciaDocumento6 páginasCircuito RLC em série: Resposta em frequênciaAnna Carla JoiaAinda não há avaliações
- Atividade IndividualDocumento6 páginasAtividade IndividualKethellen SargesAinda não há avaliações
- UN03Documento33 páginasUN03Marcos GarciaAinda não há avaliações
- O Que É Química? O Que É Ciência Dos Materiais? Por Que Estudar?Documento8 páginasO Que É Química? O Que É Ciência Dos Materiais? Por Que Estudar?FREDERICO FORMENTI THOMAZ DE SOUZA PRADOAinda não há avaliações
- Araldite MY750 - Boletim TecnicoDocumento4 páginasAraldite MY750 - Boletim TecnicoMarcelo SouzaAinda não há avaliações
- Proteção e automação de sistemas elétricosDocumento59 páginasProteção e automação de sistemas elétricosDallas FerreiraAinda não há avaliações
- Análise Numérica de Escavações Profundas em SoloDocumento26 páginasAnálise Numérica de Escavações Profundas em SoloBreno NogueiraAinda não há avaliações
- Ficha de Trabalho 18Documento3 páginasFicha de Trabalho 18Luis SantosAinda não há avaliações
- Diagrama de MoodyDocumento4 páginasDiagrama de MoodymicellicamargoAinda não há avaliações
- Importância da inspeção na qualidade de componentes mecânicosDocumento71 páginasImportância da inspeção na qualidade de componentes mecânicosFabricio Ilidio Dias100% (1)
- Atividade DiagnósticaDocumento12 páginasAtividade Diagnósticadiogenes.piresAinda não há avaliações
- Material Live Recuperação de Estruturas de Concreto Armado - 14.07.2020Documento14 páginasMaterial Live Recuperação de Estruturas de Concreto Armado - 14.07.2020Williams JoseAinda não há avaliações
- DUCTILIDADDocumento10 páginasDUCTILIDADErick Alexander Díaz ArruéAinda não há avaliações
- Eletricidade I - Atividade Prática IDocumento2 páginasEletricidade I - Atividade Prática IWilliams Will0% (1)
- Lista de Exercícios AV1.Documento4 páginasLista de Exercícios AV1.Carlos BrandãoAinda não há avaliações
- BL 06 - Prog. Maquinas Primarias-Vs.bDocumento4 páginasBL 06 - Prog. Maquinas Primarias-Vs.bJorge PauloAinda não há avaliações
- Atividade de Pesquisa - Atualizada - 05.2022Documento3 páginasAtividade de Pesquisa - Atualizada - 05.2022leandrodasilveiraoliveiraAinda não há avaliações
- Primeira Lei da Termodinâmica e Transformações TérmicasDocumento29 páginasPrimeira Lei da Termodinâmica e Transformações Térmicaskapivara511Ainda não há avaliações
- Alphaville 210 - ELE - R04-Prancha 01 6Documento1 páginaAlphaville 210 - ELE - R04-Prancha 01 6Gabriel GutierrezAinda não há avaliações
- LISTA 6 - Metalurgia Das Ligas FerrosasDocumento10 páginasLISTA 6 - Metalurgia Das Ligas FerrosasJoão PauloAinda não há avaliações
- Magnetic Sensor DimensionsDocumento2 páginasMagnetic Sensor DimensionsCairo LucasAinda não há avaliações
- Lista 4 Sistemas Térmicos PDFDocumento2 páginasLista 4 Sistemas Térmicos PDFLucas RodriguesAinda não há avaliações
- Relatório Projetos ElétricosDocumento11 páginasRelatório Projetos ElétricosHarianne Siqueira Santos hss6Ainda não há avaliações
- Atividade Avaliativa BohrDocumento1 páginaAtividade Avaliativa BohrThaiz AntiszkoAinda não há avaliações
- Datasheet Inversor Canadian CSI 30KTL GI L 30KW TRIFASICO 220VDocumento2 páginasDatasheet Inversor Canadian CSI 30KTL GI L 30KW TRIFASICO 220VLuã GabrielAinda não há avaliações
- Vidros Elétricos SistemaDocumento6 páginasVidros Elétricos SistemaFernanda SchlickmannAinda não há avaliações
- EEL 7107 - 13 (v2.2) - Seleção de Condutores PDFDocumento26 páginasEEL 7107 - 13 (v2.2) - Seleção de Condutores PDFYasmim de SouzaAinda não há avaliações
- Resolução para P1-2Sem-22Documento155 páginasResolução para P1-2Sem-22GustavoAinda não há avaliações