Você também pode gostar
- ABNT NBR 7187 21 Projeto de Pontes de Concreto Armado e de Concreto ProtendidoDocumento82 páginasABNT NBR 7187 21 Projeto de Pontes de Concreto Armado e de Concreto Protendidokuroski201075% (4)
- Fundamentos Da Física Para A Ciência E Engenharia Dos MateriaisNo EverandFundamentos Da Física Para A Ciência E Engenharia Dos MateriaisAinda não há avaliações
- Metodo de Gauss PDFDocumento5 páginasMetodo de Gauss PDFFrancisca Silva100% (1)
- Apostila Armamento CFSDDocumento34 páginasApostila Armamento CFSDRamon Domingues WellnerAinda não há avaliações
- Shamata Pura e Impura Da Apo 4 NV v.2Documento6 páginasShamata Pura e Impura Da Apo 4 NV v.2Marcos Vinícius100% (1)
- Análise Temática PDFDocumento13 páginasAnálise Temática PDFGeraldo Martins100% (3)
- Teste TriangularDocumento8 páginasTeste TriangularAdelaide SilvaAinda não há avaliações
- Educação Física BNCCDocumento5 páginasEducação Física BNCCEuder Pereira100% (1)
- Resenha Cartografia Temática (Livro de Marcello Martinelli)Documento3 páginasResenha Cartografia Temática (Livro de Marcello Martinelli)Ana Paula Bortolucci67% (3)
- 3 - Cinem Tica e Visualiza o - de EscoamentosDocumento22 páginas3 - Cinem Tica e Visualiza o - de Escoamentosmatheus.vfaria02Ainda não há avaliações
- Aula 10 MecFlu 11 05 2022Documento21 páginasAula 10 MecFlu 11 05 2022Natalino SouzaAinda não há avaliações
- 3-1c-Mathcad - Exemplo - 11 - 1 - Ger - Func-ExtremosDocumento4 páginas3-1c-Mathcad - Exemplo - 11 - 1 - Ger - Func-ExtremosJailton MartinsAinda não há avaliações
- Gabarito Da Prova 1. A - CVT: Nome: RaDocumento2 páginasGabarito Da Prova 1. A - CVT: Nome: RaAgatha MarquesAinda não há avaliações
- Limite 01Documento2 páginasLimite 01Larissa Maturana De PaulaAinda não há avaliações
- Lista FTDocumento2 páginasLista FTAna CarolinaAinda não há avaliações
- Resumos de Análise Matemática IIIDocumento28 páginasResumos de Análise Matemática IIIRicardinhorickAinda não há avaliações
- Lista4 FisicaMatematica2 2023 1Documento1 páginaLista4 FisicaMatematica2 2023 1catherinerysorrowAinda não há avaliações
- FlashDocumento3 páginasFlashESTER SANTOSAinda não há avaliações
- Derivada AntiderivadaDocumento24 páginasDerivada AntiderivadaTiago CoelhoAinda não há avaliações
- Formulário Tm1 v18112020Documento2 páginasFormulário Tm1 v18112020Joao SousaAinda não há avaliações
- Prova 01Documento3 páginasProva 01Henrique Patriota AlvesAinda não há avaliações
- DERIVADASDocumento19 páginasDERIVADASsenogih230Ainda não há avaliações
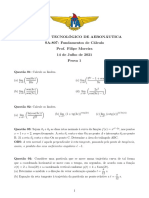
- Questões de Limites e DerivadasDocumento3 páginasQuestões de Limites e DerivadasFilipe MoreiraAinda não há avaliações
- SEP 1 - Cap 3 Item 3.1.5 - Modelos de Linhas PDFDocumento16 páginasSEP 1 - Cap 3 Item 3.1.5 - Modelos de Linhas PDFPriscilla VasconcelosAinda não há avaliações
- Notas de Aula Física 1Documento24 páginasNotas de Aula Física 1Ingrid FreitasAinda não há avaliações
- Aula 6 Relatividade IIDocumento35 páginasAula 6 Relatividade IIHenrico HirataAinda não há avaliações
- Trabalho de MecfluDocumento21 páginasTrabalho de MecfluespantaselvaAinda não há avaliações
- Exercicio CASADocumento6 páginasExercicio CASACarlos Eduardo GuerraAinda não há avaliações
- Fluxo de Fluidos em Meios PorososDocumento29 páginasFluxo de Fluidos em Meios Porososeduardo_ricaldiAinda não há avaliações
- Fluxo de Fluidos em Meios PorososDocumento27 páginasFluxo de Fluidos em Meios Porososeduardo_ricaldiAinda não há avaliações
- Trabalho de EquipeDocumento4 páginasTrabalho de EquipeRodrigoAinda não há avaliações
- Semana 10apDocumento3 páginasSemana 10apArthur DaherAinda não há avaliações
- Lista 11 MA111Documento1 páginaLista 11 MA111Lucas RenanAinda não há avaliações
- CURSO DE CÁLCULO - CompressedDocumento44 páginasCURSO DE CÁLCULO - CompressedJoão Victor Morais PontesAinda não há avaliações
- 2018Fev20-Econ-Gest (1) Matematica IDocumento2 páginas2018Fev20-Econ-Gest (1) Matematica Itfarodrigues98Ainda não há avaliações
- Teste GeometriaDocumento4 páginasTeste GeometriaRita Lourenço CAinda não há avaliações
- Lista 7 Cálculo 1Documento5 páginasLista 7 Cálculo 1André Henrique FernandesAinda não há avaliações
- Lista 1Documento5 páginasLista 1Helena B. SantosAinda não há avaliações
- Semana 10 AplicaçãoDocumento3 páginasSemana 10 Aplicaçãomar.granjeiro.henriqueAinda não há avaliações
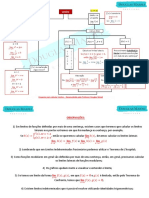
- Esquema para Calcular Um Limite Com Lista de ExercíciosDocumento4 páginasEsquema para Calcular Um Limite Com Lista de ExercíciosAnael Santos dos ReisAinda não há avaliações
- Portico Aula1Documento16 páginasPortico Aula1Damdev SoftwareAinda não há avaliações
- Arcos AulasDocumento35 páginasArcos AulasRafael ReisAinda não há avaliações
- Ficha 12-1 - Revisões 11º - FunçõesDocumento2 páginasFicha 12-1 - Revisões 11º - FunçõesJorge Carlos SousaAinda não há avaliações
- Relatório - Exp4 - Leis de Kirchhoff - Fenômenos Eletromagnéticos - Trim2.1Documento18 páginasRelatório - Exp4 - Leis de Kirchhoff - Fenômenos Eletromagnéticos - Trim2.1Fernando Henrique G. ZucatelliAinda não há avaliações
- Dinâmica de Um Sistema de PartículasDocumento2 páginasDinâmica de Um Sistema de PartículasLucasAinda não há avaliações
- Algumas Questões Do MoysésDocumento12 páginasAlgumas Questões Do MoysésJoão Guilherme VianaAinda não há avaliações
- Control PDFDocumento112 páginasControl PDFVinicius BortoluzziAinda não há avaliações
- Seminario Eficiencia de MaquinasDocumento62 páginasSeminario Eficiencia de MaquinasMarina Baldissera de SouzaAinda não há avaliações
- Ad1 Ci 2020-1Documento2 páginasAd1 Ci 2020-1Éleda ChristinneAinda não há avaliações
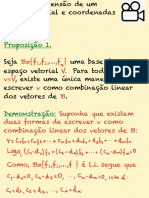
- Aula5 - Dimensão de Um Espaço Vetorial e Coordenadas PDFDocumento12 páginasAula5 - Dimensão de Um Espaço Vetorial e Coordenadas PDFJonathan Storari FerreiraAinda não há avaliações
- Relatório 2 Lab FisícaDocumento8 páginasRelatório 2 Lab FisícaGuilherme CunaliAinda não há avaliações
- Aula 1 - 1 Movimento de Particulas em FluidoDocumento9 páginasAula 1 - 1 Movimento de Particulas em FluidoNaeem SaleAinda não há avaliações
- Modulo 3 PDFDocumento195 páginasModulo 3 PDFYves GarnardAinda não há avaliações
- 3 - Conservação Da Quantidade de Movimento - SHS 0357Documento20 páginas3 - Conservação Da Quantidade de Movimento - SHS 0357Eugenio ManuelAinda não há avaliações
- Mma11 Qa 4 2Documento4 páginasMma11 Qa 4 2Paula PontesAinda não há avaliações
- Apostila PrimoDocumento85 páginasApostila PrimoSofia GilóAinda não há avaliações
- Sucessões e Limites de FuncoesDocumento4 páginasSucessões e Limites de FuncoesBetuchoAinda não há avaliações
- Lista4 Rotacao-Eixo-Z RESOLUÇÃODocumento5 páginasLista4 Rotacao-Eixo-Z RESOLUÇÃOPedro Sousa CastroAinda não há avaliações
- Exercicios FourierDocumento8 páginasExercicios Fourierjmcoliver10Ainda não há avaliações
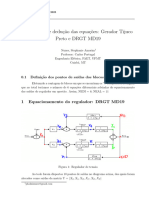
- DRGT MD19 Stephanie Amorim NunesDocumento3 páginasDRGT MD19 Stephanie Amorim NunesStephanie NunesAinda não há avaliações
- Capítulo 4 - Movimento 1D (Teoria)Documento22 páginasCapítulo 4 - Movimento 1D (Teoria)Joaquim Guerreiro MarquesAinda não há avaliações
- Est 55 02 2009Documento79 páginasEst 55 02 2009Ricardo TeixeiraAinda não há avaliações
- Lista 2Documento10 páginasLista 2wilsonbarbosa0212Ainda não há avaliações
- L 2 DicasDocumento8 páginasL 2 DicasIzabel FerreiraAinda não há avaliações
- Lemade MorseDocumento5 páginasLemade MorseMayra SoaresAinda não há avaliações
- Lista Ex Taxa Relacionada GraficoDocumento1 páginaLista Ex Taxa Relacionada GraficoErick HenriqueAinda não há avaliações
- 2015 Exame M23Documento3 páginas2015 Exame M23Diana TabordaAinda não há avaliações
- Prática 3 - Dosagem Do Concreto de Alto Desempenho (Cad) - Converted - by - AbcdpdfDocumento7 páginasPrática 3 - Dosagem Do Concreto de Alto Desempenho (Cad) - Converted - by - AbcdpdfDiego SulinoAinda não há avaliações
- A III EIPsi 2012Documento23 páginasA III EIPsi 2012HORUS_KHANAinda não há avaliações
- Mrotaer 20140102sssssDocumento61 páginasMrotaer 20140102sssssDiego GomesAinda não há avaliações
- Slide Proteção Das Mãos.Documento17 páginasSlide Proteção Das Mãos.Giselly BiancaAinda não há avaliações
- AP1 - AII - 2019-2 - GabaritoDocumento3 páginasAP1 - AII - 2019-2 - GabaritoRoberto Jesus LinaresAinda não há avaliações
- GargulasDocumento7 páginasGargulasJoao Marcelo Carvalho Leite100% (1)
- BolGeoCiencias Bacias AsmusDocumento36 páginasBolGeoCiencias Bacias AsmusgenniluccAinda não há avaliações
- Ssa 1 - 2014Documento4 páginasSsa 1 - 2014Silvia Campos CamposAinda não há avaliações
- Prática 9 - Preparo e Padronização de Uma Solução de Na2S2O3Documento5 páginasPrática 9 - Preparo e Padronização de Uma Solução de Na2S2O3Lincoln TassiAinda não há avaliações
- Funções e Aplicações para Química e BiológicasDocumento87 páginasFunções e Aplicações para Química e BiológicasBenjamim HenriqueAinda não há avaliações
- Equações de 1º Grau - Lista 2Documento2 páginasEquações de 1º Grau - Lista 2Ana AntiqueiraAinda não há avaliações
- 3 TandenDocumento3 páginas3 TandenRomulo PimentaAinda não há avaliações
- 150.00007 ViewDocumento2 páginas150.00007 ViewDeyvid RabelloAinda não há avaliações
- Obsessão EletronicaDocumento3 páginasObsessão EletronicaGilzevandro SanchesAinda não há avaliações
- Calibração e Balança Analitica Relatorio ProntoDocumento25 páginasCalibração e Balança Analitica Relatorio ProntoMaiara PratesAinda não há avaliações
- QuestõesDocumento3 páginasQuestõesgcds1Ainda não há avaliações
- Capitulo 6Documento31 páginasCapitulo 6Geraldo NetoAinda não há avaliações
- Dimensionamento de BateriasDocumento50 páginasDimensionamento de BateriasLécio G. Matos Matos100% (1)
- I E B T: Nstalações Létricas de Aixa EnsãoDocumento231 páginasI E B T: Nstalações Létricas de Aixa EnsãoValdir silvaAinda não há avaliações
- Exame Modelo 12 Jun2021 FCDocumento7 páginasExame Modelo 12 Jun2021 FCAntónio SantosAinda não há avaliações
- Analise de Viga Engastada e LivreDocumento26 páginasAnalise de Viga Engastada e LivreRodrigo BarrosAinda não há avaliações
- 16 - Lista 7 - Física IIIDocumento4 páginas16 - Lista 7 - Física IIIItalo RiccelliAinda não há avaliações