Você também pode gostar
- TMM - Resumo para Aula Tema - 2.1Documento7 páginasTMM - Resumo para Aula Tema - 2.1Rafael Tobias Canalobuana CanalobuanaAinda não há avaliações
- Análise de mecanismos de quatro barrasDocumento40 páginasAnálise de mecanismos de quatro barrasGustavo BritoAinda não há avaliações
- Tipos de MecanismosDocumento50 páginasTipos de MecanismosChico PedrosaAinda não há avaliações
- Mecanismo de quatro barrasDocumento22 páginasMecanismo de quatro barrasCarlos Eduardo JungesAinda não há avaliações
- Apostila de MecanismosDocumento48 páginasApostila de MecanismosJaqueline SantosAinda não há avaliações
- Cap 02 Sistemas Articulados 2007 2Documento8 páginasCap 02 Sistemas Articulados 2007 2Daiane ThomazAinda não há avaliações
- Livro 2Documento14 páginasLivro 2Gabriel CastroAinda não há avaliações
- Sistemas ArticuladosDocumento7 páginasSistemas ArticuladosAndressa RochaAinda não há avaliações
- Cap3 Sistemas Articulados de Retorno RapidoDocumento13 páginasCap3 Sistemas Articulados de Retorno RapidoJoao AsdfasAinda não há avaliações
- Mecanismo de Quadro BarrasDocumento27 páginasMecanismo de Quadro BarrasSalvador MessiasAinda não há avaliações
- Cinemática 4º BI MECANISMOSDocumento13 páginasCinemática 4º BI MECANISMOSwill 13Ainda não há avaliações
- Biela-Manivela - Estudo Dos Movimentos (Luzimário Oliveira)Documento5 páginasBiela-Manivela - Estudo Dos Movimentos (Luzimário Oliveira)pampmAinda não há avaliações
- Mecanismos - Relatório Dos CódigosDocumento32 páginasMecanismos - Relatório Dos CódigosGuilherme DuarteAinda não há avaliações
- Funcionamento de Correias TransportadorasDocumento19 páginasFuncionamento de Correias Transportadorasmp22cmaAinda não há avaliações
- Mecanismos articulados: conceitos e aplicaçõesDocumento15 páginasMecanismos articulados: conceitos e aplicaçõestscopelAinda não há avaliações
- Mecanismo biela manivelaDocumento6 páginasMecanismo biela manivelaMichel Felippe Souza Teixeira0% (1)
- Prob Cap2 DMV 2osemDocumento9 páginasProb Cap2 DMV 2osemGustavo MollicaAinda não há avaliações
- ENG 220 - Projeto Do Torno PDFDocumento10 páginasENG 220 - Projeto Do Torno PDFPedro dantasAinda não há avaliações
- Exercícios de mecanismos articuladosDocumento9 páginasExercícios de mecanismos articuladosDanilo AzevedoAinda não há avaliações
- Dinâmica Aplicada A Movimento de CamesDocumento9 páginasDinâmica Aplicada A Movimento de CamesmarcioscariotAinda não há avaliações
- Transmissão de movimento mecânicoDocumento15 páginasTransmissão de movimento mecânicoRômulo TrindadeAinda não há avaliações
- Cinematica Dinamica 181Documento199 páginasCinematica Dinamica 181Nathalia Lais100% (1)
- Mecanismos 03Documento43 páginasMecanismos 03Leonardo LeomeAinda não há avaliações
- Manual Talhas Berg SteelDocumento40 páginasManual Talhas Berg SteelRodolfo Pessoa100% (2)
- Sistemas de transmissão automóvelDocumento33 páginasSistemas de transmissão automóvelNuno CunhaAinda não há avaliações
- Diagrama de velocidades em máquinas hidráulicasDocumento31 páginasDiagrama de velocidades em máquinas hidráulicasAlber DuqueAinda não há avaliações
- Biela ManivelaDocumento6 páginasBiela ManivelaAlfredo FrancaAinda não há avaliações
- Análise do movimento de um pistão no sistema biela-manivelaDocumento6 páginasAnálise do movimento de um pistão no sistema biela-manivelaBruno D'almeidaAinda não há avaliações
- Mecanismos Aulas ApostilaDocumento33 páginasMecanismos Aulas ApostilaAlexandre Corso100% (1)
- Acionamento de Máquinas e FerramentasDocumento9 páginasAcionamento de Máquinas e FerramentasJoão Vinicius KalinosckiAinda não há avaliações
- Treinamento Sobre Roldanas e Cabos de AçoDocumento32 páginasTreinamento Sobre Roldanas e Cabos de AçoJosé Carlos R. MacielAinda não há avaliações
- Apostila de Tornearia da FAETECDocumento165 páginasApostila de Tornearia da FAETECRoberto Ferreira100% (2)
- Manuais de operação e manutenção de equipamentos de elevaçãoDocumento40 páginasManuais de operação e manutenção de equipamentos de elevaçãoJuliana DottoAinda não há avaliações
- Mecanismos de Excêntrico - Came-SeguidorDocumento17 páginasMecanismos de Excêntrico - Came-SeguidorRafael Tobias Canalobuana CanalobuanaAinda não há avaliações
- Aula3 Motor de Passo 2013 1 13 03 2013 Final PDFDocumento43 páginasAula3 Motor de Passo 2013 1 13 03 2013 Final PDFEdneiPossidoniodeOliveiraAinda não há avaliações
- Motores Elétricos TrifásicosDocumento37 páginasMotores Elétricos TrifásicosJosé QuaresmaAinda não há avaliações
- Mecânica Aplicada IIDocumento9 páginasMecânica Aplicada IIphilipeAinda não há avaliações
- Balanceamento de rotores: técnicas e instrumentaçãoDocumento12 páginasBalanceamento de rotores: técnicas e instrumentaçãoHebert Coutinho100% (1)
- Aula 6 - A - Parte 1 - Tipos de Mecanismos - 2020-2Documento13 páginasAula 6 - A - Parte 1 - Tipos de Mecanismos - 2020-2Gabriel MedeirosAinda não há avaliações
- UNIP Engenharia de Automação - Fresamento e Cabeçote DivisorDocumento16 páginasUNIP Engenharia de Automação - Fresamento e Cabeçote DivisorrenanbarelaAinda não há avaliações
- PUC - CINEMATICA - A03 - Cadeias - Cinematicas - Mecanismos - Articulados - 2x1Documento42 páginasPUC - CINEMATICA - A03 - Cadeias - Cinematicas - Mecanismos - Articulados - 2x1Ricardo AlvesAinda não há avaliações
- Unidade de Bombeio MecânicoDocumento8 páginasUnidade de Bombeio MecânicoRodolfo AquinoAinda não há avaliações
- Relatorio de Elementos de Máquinas 2Documento15 páginasRelatorio de Elementos de Máquinas 2Eleno RibeiroAinda não há avaliações
- Máquinas Elétricas: Princípios e AplicaçõesDocumento22 páginasMáquinas Elétricas: Princípios e AplicaçõesfelipebozoAinda não há avaliações
- Relátorio, Segunda Av. de Cinemática. Fernando Silva.Documento16 páginasRelátorio, Segunda Av. de Cinemática. Fernando Silva.fernando alvesAinda não há avaliações
- Forças de inércia em mecanismosDocumento24 páginasForças de inércia em mecanismosGabriel CastroAinda não há avaliações
- Rotor dinâmica análiseDocumento10 páginasRotor dinâmica análiseshortsfyleAinda não há avaliações
- RelatórioDocumento18 páginasRelatórioPedro RhodenAinda não há avaliações
- Aula - 2 Motores de Corrente Contínua Com EscovasDocumento13 páginasAula - 2 Motores de Corrente Contínua Com EscovasCarlos Alexandre FerriAinda não há avaliações
- Atividade Pós Aula 31 8 2021Documento4 páginasAtividade Pós Aula 31 8 2021Diego SantosAinda não há avaliações
- Servo MotorDocumento14 páginasServo MotorchnanduAinda não há avaliações
- Prova Mecanismos VFDocumento5 páginasProva Mecanismos VFJose Rui BarbosaAinda não há avaliações
- Guia de Experimento Da Maquina de Indução 2016.1Documento18 páginasGuia de Experimento Da Maquina de Indução 2016.1A.R. RAinda não há avaliações
- Transmissão MQ 02: mecanismo de troca de marchasDocumento6 páginasTransmissão MQ 02: mecanismo de troca de marchasPedro Henrique MesquitaAinda não há avaliações
- Projetos Com Esp8266 Programado Em Lua - Parte XxiiiNo EverandProjetos Com Esp8266 Programado Em Lua - Parte XxiiiAinda não há avaliações
- Lista de Trigonometria - Arcos e Ângulos - GABARITODocumento8 páginasLista de Trigonometria - Arcos e Ângulos - GABARITOThalyta ChavesAinda não há avaliações
- MANUAL DE INSTALAÇÃO E OPERAÇÃO - Set FreeDocumento117 páginasMANUAL DE INSTALAÇÃO E OPERAÇÃO - Set FreeJuan C da SilvaAinda não há avaliações
- T T T T Toledo Oledo Oledo Oledo Oledo: Balança Eletrônica Portátil ToledoDocumento26 páginasT T T T Toledo Oledo Oledo Oledo Oledo: Balança Eletrônica Portátil ToledoBiotronica Assis TecAinda não há avaliações
- Jig Saw Instruction ManualDocumento30 páginasJig Saw Instruction ManualPedro Pereira da CostaAinda não há avaliações
- Exercícios Materiais Naturais e ArtificiaisDocumento9 páginasExercícios Materiais Naturais e ArtificiaisNádiaCalixtoAinda não há avaliações
- PCP SupervisorDocumento2 páginasPCP SupervisoradaiutonAinda não há avaliações
- Eaoear 2013 - Engenharia Civil - Versão B PDFDocumento16 páginasEaoear 2013 - Engenharia Civil - Versão B PDFpitoco2009Ainda não há avaliações
- Manual Do Desenvolvedor Pagconsorcio PDFDocumento5 páginasManual Do Desenvolvedor Pagconsorcio PDFFelipe PominiAinda não há avaliações
- Questões PETROBRAS Engenheiro ProduçãoDocumento15 páginasQuestões PETROBRAS Engenheiro ProduçãoAlexsandro MartinsAinda não há avaliações
- Relatório - ERRO ALEATÓRIODocumento8 páginasRelatório - ERRO ALEATÓRIOCleyber Moura da SilvaAinda não há avaliações
- Ingles para Instrumental para InformáticaDocumento34 páginasIngles para Instrumental para InformáticaAdailton Freitas95% (19)
- 1380 SurDocumento28 páginas1380 Surwilson silveiraAinda não há avaliações
- Fundamentos de Ciência e Engenharia de Materiais: Defeitos CristalinosDocumento63 páginasFundamentos de Ciência e Engenharia de Materiais: Defeitos CristalinosHenrique MillerAinda não há avaliações
- Curso GTD gera transmite distribui energiaDocumento9 páginasCurso GTD gera transmite distribui energiaHiro ToyonagaAinda não há avaliações
- Pad 3Documento60 páginasPad 3Lucas Sancho RodriguesAinda não há avaliações
- Manual de Instalação - Kit Corrente RolbrásDocumento2 páginasManual de Instalação - Kit Corrente RolbrásezequielfragnanAinda não há avaliações
- Compara Excel e LibreOffice CalcDocumento12 páginasCompara Excel e LibreOffice CalcMateus OliveiraAinda não há avaliações
- Manual Cramaco Português 160 200 280 315 400 - r2Documento47 páginasManual Cramaco Português 160 200 280 315 400 - r2Rodrigo RaloAinda não há avaliações
- TEMA3Documento63 páginasTEMA3Fernando MezesAinda não há avaliações
- Harmonize Seu Lar Com Feng Shui - Moema RodriguezDocumento60 páginasHarmonize Seu Lar Com Feng Shui - Moema RodriguezLucas Greco100% (2)
- Elevador Pantográfico - NBR 8400 - CLESIR PULCENA DE SOUZADocumento20 páginasElevador Pantográfico - NBR 8400 - CLESIR PULCENA DE SOUZATiago Carnovali PessoaAinda não há avaliações
- Manual Bipap Auto System One Philips RespironicsDocumento24 páginasManual Bipap Auto System One Philips RespironicsfadirsalmenAinda não há avaliações
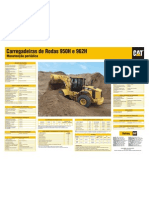
- CAT - 950H e 962H 2006Documento1 páginaCAT - 950H e 962H 2006Marcelo Cardozo100% (3)
- Circuito de Relé de Estado SólidoDocumento1 páginaCircuito de Relé de Estado SólidoAlexandreAinda não há avaliações
- Lista Exercícios TensãoDocumento1 páginaLista Exercícios TensãoClécioChrisAinda não há avaliações
- Ag Primavera Do Leste-Arq-S1Documento1 páginaAg Primavera Do Leste-Arq-S1trabalho sempreAinda não há avaliações
- Apostila Ufg - Sistema de Esgoto Sanitario PDFDocumento28 páginasApostila Ufg - Sistema de Esgoto Sanitario PDFAndreia Cezar Pedreira100% (2)
- Memorial de Calculo SerpentinaDocumento6 páginasMemorial de Calculo SerpentinaRonaldo CruzAinda não há avaliações
- Uma técnica de sopro de solução foi desenvolvido usando elementos de eletrofiação e fusão tecnologias de sopro como um método alternativo para fazer teias não tecidas de micro e nanofibras com diâmetros compDocumento10 páginasUma técnica de sopro de solução foi desenvolvido usando elementos de eletrofiação e fusão tecnologias de sopro como um método alternativo para fazer teias não tecidas de micro e nanofibras com diâmetros compsmedvideoAinda não há avaliações
- Manual GWS 20-180/230Documento31 páginasManual GWS 20-180/230lucas171adriano100% (1)