Você também pode gostar
- LOGO Siemens - Manual PTDocumento274 páginasLOGO Siemens - Manual PTchnandu83% (6)
- Curso de SigilosDocumento37 páginasCurso de Sigilosdistopia699100% (5)
- Programação Em Assembly Para O Microcontrolador Pic12f Volume INo EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume INota: 5 de 5 estrelas5/5 (1)
- Quimica 11 ClasseDocumento154 páginasQuimica 11 ClasseDann Santiago100% (2)
- 14 RefrigeraçãoDocumento29 páginas14 RefrigeraçãoErneson CostaAinda não há avaliações
- Atlas Copco - GR200 PTDocumento88 páginasAtlas Copco - GR200 PTchnandu100% (1)
- Imagens Frenometro BoschDocumento8 páginasImagens Frenometro BoschRafael ShibayamaAinda não há avaliações
- Curso de Fibra ÓpticaDocumento186 páginasCurso de Fibra ÓpticaArthur Magalhaes100% (4)
- Robo Kawasaki - Manutencao e Controle F SerieDocumento29 páginasRobo Kawasaki - Manutencao e Controle F Seriechnandu75% (4)
- SMT e SMDDocumento3 páginasSMT e SMDGerson SoaresAinda não há avaliações
- Cat Eng Fin Fin FinDocumento19 páginasCat Eng Fin Fin FinMarcosAinda não há avaliações
- Apostila - Curso Eletricista ACIONAMENTOS DE MOTORESDocumento47 páginasApostila - Curso Eletricista ACIONAMENTOS DE MOTORESCleber Samir GaspariniAinda não há avaliações
- Tabela Industry CompletaDocumento1.218 páginasTabela Industry CompletaSteve797979Ainda não há avaliações
- Apostila Curso Rockwell Soft RS Logix 5Documento222 páginasApostila Curso Rockwell Soft RS Logix 5chnandu100% (11)
- UNICAMP Cap 8 Soldagem RobotizadaDocumento17 páginasUNICAMP Cap 8 Soldagem Robotizadatiagorichter1767Ainda não há avaliações
- Controlador Programável MPC4004 Ref. 3-0019.210 Manual Rev. 2.10 Agosto/2001Documento146 páginasControlador Programável MPC4004 Ref. 3-0019.210 Manual Rev. 2.10 Agosto/2001Leandro FernandesAinda não há avaliações
- Monetização De Veículos Elétricos: Gestão Pelo Lado Da Demanda E EletromobilidadeNo EverandMonetização De Veículos Elétricos: Gestão Pelo Lado Da Demanda E EletromobilidadeAinda não há avaliações
- Apostila Eletronica Analogica CHMDocumento116 páginasApostila Eletronica Analogica CHMCarlos Henrique MonteiroAinda não há avaliações
- Robo Kawasaki - Manual Operacional D SerieDocumento429 páginasRobo Kawasaki - Manual Operacional D Seriechnandu100% (8)
- Servo AcionamentoseDocumento78 páginasServo AcionamentosePedro BarbosaAinda não há avaliações
- Documento 11Documento3 páginasDocumento 11João Henrique Ivo FreitasAinda não há avaliações
- Aula 1 - Sinais Analógico e DigitalDocumento10 páginasAula 1 - Sinais Analógico e DigitalRafael JesusAinda não há avaliações
- Introdução A RobóticaDocumento22 páginasIntrodução A RobóticachnanduAinda não há avaliações
- Tipos de Frenagem para Motores ElétricosDocumento13 páginasTipos de Frenagem para Motores ElétricosJefferson Sousa Rocha UFCAinda não há avaliações
- Apostila01 Automacao e Instrumentacao IndustrialDocumento115 páginasApostila01 Automacao e Instrumentacao IndustrialMoisésDárioSilvaAinda não há avaliações
- SERVOACIONAMENTOS-Com Sensores - MCTR AtualDocumento8 páginasSERVOACIONAMENTOS-Com Sensores - MCTR AtualEsrom VitorianoAinda não há avaliações
- PLC Ling LadderDocumento48 páginasPLC Ling LadderLuis Miguel C. R. MagalhaesAinda não há avaliações
- Manual de Operação e Manutenção - H120Documento68 páginasManual de Operação e Manutenção - H120Victor FernandesAinda não há avaliações
- Introducao Controle AutomacaoDocumento67 páginasIntroducao Controle AutomacaoWillian Richelle FreitasAinda não há avaliações
- Teste Avaliacao 5ano NOV16Documento5 páginasTeste Avaliacao 5ano NOV16paulaAinda não há avaliações
- Robo Kawasaki - Manual I - O Externos Serie DDocumento88 páginasRobo Kawasaki - Manual I - O Externos Serie DchnanduAinda não há avaliações
- Livro - 100 Circuitos de Automação e Controle-1Documento2 páginasLivro - 100 Circuitos de Automação e Controle-1asc1Ainda não há avaliações
- Lei Da Gravitação UniversalDocumento13 páginasLei Da Gravitação UniversalNagilson SousaAinda não há avaliações
- Servo MotoresDocumento12 páginasServo Motoreseric976100% (1)
- Kalid Apostila de Estratégias de ControleDocumento100 páginasKalid Apostila de Estratégias de ControleAdalicio Neto100% (1)
- Apostila Roteiros Lab Automação IndustrialDocumento80 páginasApostila Roteiros Lab Automação IndustrialJhonatan TavaresAinda não há avaliações
- Guia Rápido de Aplicação - Inversor de Frequência Powerflex 4Documento9 páginasGuia Rápido de Aplicação - Inversor de Frequência Powerflex 4Ronaldo Tourinho100% (1)
- Torno FresaDocumento106 páginasTorno FresaMauro BussAinda não há avaliações
- Programação Em Assembly Para O Microcontrolador Pic18f Volume INo EverandProgramação Em Assembly Para O Microcontrolador Pic18f Volume IAinda não há avaliações
- Sistemas CiberfísicosDocumento41 páginasSistemas CiberfísicosEmilly Melo100% (1)
- Aula 04 - Sistemas Lógicos ProgramáveisDocumento15 páginasAula 04 - Sistemas Lógicos ProgramáveisWAGNER RODRIGUES DE ABREUAinda não há avaliações
- CLPBÁSICODocumento117 páginasCLPBÁSICOrogallasAinda não há avaliações
- Projetos Elétricos IndustriaisDocumento7 páginasProjetos Elétricos IndustriaisJONAS MOREIRA LIRAAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- Fonte Regulável 1.2 À 37V Alta Corrente 20A Com LM317 e TIP35C - FVMLDocumento3 páginasFonte Regulável 1.2 À 37V Alta Corrente 20A Com LM317 e TIP35C - FVMLmaicon64Ainda não há avaliações
- Comandos Eletricos - V1Documento103 páginasComandos Eletricos - V1Gustavo SousaAinda não há avaliações
- Trabalho de Automação IndustrialDocumento11 páginasTrabalho de Automação IndustrialJoão PauloAinda não há avaliações
- Manual 2106LD 00XDocumento31 páginasManual 2106LD 00Xmpr2001Ainda não há avaliações
- (Abnt-Nbr 5175) - Código Numérico Das Funções Dos Dispositivos de Manobra, Controle e Proteção de Sistemas de Potência (Simbologia) - DocumentsDocumento14 páginas(Abnt-Nbr 5175) - Código Numérico Das Funções Dos Dispositivos de Manobra, Controle e Proteção de Sistemas de Potência (Simbologia) - DocumentsClaudemir SilvaAinda não há avaliações
- Isolação de Motor Corrente ContínuaDocumento4 páginasIsolação de Motor Corrente ContínuaRobson TelesAinda não há avaliações
- Os 8 Desperdícios Mais Comuns em EmpresasDocumento15 páginasOs 8 Desperdícios Mais Comuns em Empresasangela raschAinda não há avaliações
- Apresentação ERP - Power PointDocumento22 páginasApresentação ERP - Power PointJheinny SarahAinda não há avaliações
- Hands On G120 - 2016Documento26 páginasHands On G120 - 2016Rodrigo SgrilloAinda não há avaliações
- Cabo de Programação PLC MitsubishiDocumento2 páginasCabo de Programação PLC MitsubishiPREVISTOAinda não há avaliações
- Processos de Usinagem Apostilas Engenharia Mecanica Part1 PDFDocumento60 páginasProcessos de Usinagem Apostilas Engenharia Mecanica Part1 PDFLidiane SilvaAinda não há avaliações
- TRANSFORMADORES IdeaisDocumento41 páginasTRANSFORMADORES Ideaisapi-3735445100% (5)
- 34 Circuito RL Série em CADocumento22 páginas34 Circuito RL Série em CAPastorMário SérgioAinda não há avaliações
- Aplicações Básicas para TRIACsDocumento11 páginasAplicações Básicas para TRIACsaguiaaguiaAinda não há avaliações
- Bombas Centrífugas Movitec A1798 8PDocumento34 páginasBombas Centrífugas Movitec A1798 8PClash OfClansAinda não há avaliações
- Chaves Comutadora RotativasDocumento8 páginasChaves Comutadora RotativasRuan Carlos Rezende de SouzaAinda não há avaliações
- Automação SecadorDocumento38 páginasAutomação SecadorClaudio Soares manutencion100% (7)
- Circuitos - Comando IgbtDocumento52 páginasCircuitos - Comando IgbtRenato Silva100% (2)
- Catálogo Yamaho-2021Documento32 páginasCatálogo Yamaho-2021Marcelo PintoAinda não há avaliações
- Motores Corrente DC.Documento50 páginasMotores Corrente DC.ThiagoFrancisco100% (1)
- Sistema Operacional de TempoDocumento18 páginasSistema Operacional de TempofarofadevozAinda não há avaliações
- Catalogo Seccionadoras JUN-12 NetDocumento36 páginasCatalogo Seccionadoras JUN-12 NetJoseh AcjrAinda não há avaliações
- Curso Conversores e InversoresDocumento2 páginasCurso Conversores e InversoresMárcio FernandesAinda não há avaliações
- Apostila Eletrica PDFDocumento8 páginasApostila Eletrica PDFfatimalfredoAinda não há avaliações
- Manual Tor No Lee ToolsDocumento4 páginasManual Tor No Lee ToolsLeonardo Borges FróesAinda não há avaliações
- Guia de Aplicação de ServoacionamentosDocumento126 páginasGuia de Aplicação de ServoacionamentosDanilo Ferreira de SouzaAinda não há avaliações
- Aula 1-07 - Projeto Elétrico Industrial p1Documento32 páginasAula 1-07 - Projeto Elétrico Industrial p1Magno MedeirosAinda não há avaliações
- Redes ProfibusDocumento15 páginasRedes ProfibuschnanduAinda não há avaliações
- Botoeiras Cutler HammerDocumento9 páginasBotoeiras Cutler HammerchnanduAinda não há avaliações
- Tipos de AçosDocumento24 páginasTipos de AçoschnanduAinda não há avaliações
- Chaves de Seguranca SCHMERSALDocumento9 páginasChaves de Seguranca SCHMERSALchnanduAinda não há avaliações
- Planejamento e Controle Orçamentário 09 Consultas e RelatóriosDocumento4 páginasPlanejamento e Controle Orçamentário 09 Consultas e RelatóriosCleberton AntunesAinda não há avaliações
- Resumo Das Regras Do Silogismo-LibreDocumento5 páginasResumo Das Regras Do Silogismo-LibreFernando BarsottiAinda não há avaliações
- Teste Sensor de VelocidadeDocumento7 páginasTeste Sensor de VelocidadeAnderson gonçalvesAinda não há avaliações
- Fundição em Molde de Areia VerdeDocumento6 páginasFundição em Molde de Areia VerdeRui GalvaniAinda não há avaliações
- Matriz - Curso Interdisciplinar - Univesp - Matem TicaDocumento1 páginaMatriz - Curso Interdisciplinar - Univesp - Matem TicahalleyAinda não há avaliações
- Volumetria Ácido-Base EXPDocumento11 páginasVolumetria Ácido-Base EXPJamanaAinda não há avaliações
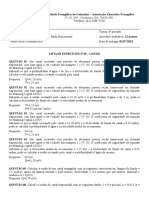
- Lista de Exercícios 3Documento3 páginasLista de Exercícios 3Anne Caroline De Paula NascimentoAinda não há avaliações
- 1-Dados Do Contratante 2 - Instrumento/Equipamento CalibradoDocumento4 páginas1-Dados Do Contratante 2 - Instrumento/Equipamento CalibradoEdjenn Brito de Oliveira SantosAinda não há avaliações
- 3 - A Medida Do Tempo e A Idade Da TerraDocumento37 páginas3 - A Medida Do Tempo e A Idade Da TerraAliceAinda não há avaliações
- P3 MQI 2018.2 Prova - UFCGDocumento1 páginaP3 MQI 2018.2 Prova - UFCGJoaquimAinda não há avaliações
- Exercícios de Cálculo 1Documento2 páginasExercícios de Cálculo 1Arthur BarcellosAinda não há avaliações
- Manual de Produto CarelDocumento2 páginasManual de Produto CarelMauricioss2313 SoaresAinda não há avaliações
- Lista de PolinomiosDocumento1 páginaLista de Polinomiosapi-3811902Ainda não há avaliações
- Estruturas Hiperestáticas 1Documento15 páginasEstruturas Hiperestáticas 1paulo1henrique.britosilveiraAinda não há avaliações
- 2018 Grelha Curricular Curso EstatisticaDocumento4 páginas2018 Grelha Curricular Curso EstatisticaManuel LuisAinda não há avaliações
- Variaveis Aleatorias ContinuasDocumento2 páginasVariaveis Aleatorias ContinuasFlávio Ferreira JuniorAinda não há avaliações
- Determinação de Cloro Ativo em AlvejanteDocumento3 páginasDeterminação de Cloro Ativo em Alvejantefabom007Ainda não há avaliações
- Exercicios Resolvidos - Eletricidade - F PDFDocumento43 páginasExercicios Resolvidos - Eletricidade - F PDFMarcela BorgesAinda não há avaliações
- Biologia Molecular - Resumos TeóricaDocumento123 páginasBiologia Molecular - Resumos TeóricaHugo RochaAinda não há avaliações
- LogaritimoDocumento36 páginasLogaritimoJunior FlavioAinda não há avaliações
- Carta de Controle P-NP-C-UDocumento15 páginasCarta de Controle P-NP-C-URoberto CamargoAinda não há avaliações
- Geometria 6º AnoDocumento4 páginasGeometria 6º AnoWhesley Campos SousaAinda não há avaliações
- mr710 Isvbun 330 24vDocumento1 páginamr710 Isvbun 330 24vM&M ASSOCIADOSAinda não há avaliações