Você também pode gostar
- CLP em Acionamento de MáquinasDocumento6 páginasCLP em Acionamento de Máquinasandreisrael0% (1)
- Controlador Lógico Programável - Wikipédia, A Enciclopédia LivreDocumento11 páginasControlador Lógico Programável - Wikipédia, A Enciclopédia LivreManutencao Dass ConfecçãoAinda não há avaliações
- Introdução a Controladores Lógicos ProgramáveisDocumento40 páginasIntrodução a Controladores Lógicos ProgramáveisRafael Pereira Goncalves100% (1)
- Questões de CLPDocumento5 páginasQuestões de CLPmarrins415Ainda não há avaliações
- Controlador Lógico ProgramávelDocumento3 páginasControlador Lógico ProgramávelElvis Jhosef BispoAinda não há avaliações
- Controlador Lógico ProgramávelDocumento67 páginasControlador Lógico ProgramávelThiagoPaganiAinda não há avaliações
- 02 Automacao Basica Parte2Documento44 páginas02 Automacao Basica Parte2Marcelo MoraesAinda não há avaliações
- O que é um CLP e suas principais funcionalidadesDocumento7 páginasO que é um CLP e suas principais funcionalidadesDiego SouzaAinda não há avaliações
- Projeto CLP - Portão GaragemDocumento14 páginasProjeto CLP - Portão GaragemNeviton Gomes80% (5)
- Introdução A Controladores Lógicos Programáveis - RevisadoDocumento34 páginasIntrodução A Controladores Lógicos Programáveis - Revisadoiurykeller64Ainda não há avaliações
- Apostila - CLP - LadderDocumento30 páginasApostila - CLP - Ladderwillianamigo189667% (3)
- História Do PLCDocumento6 páginasHistória Do PLCgenitarafael1Ainda não há avaliações
- História e evolução dos CLPsDocumento10 páginasHistória e evolução dos CLPsGustavo da SilvaAinda não há avaliações
- Programação do CLP Micrologix 1400Documento40 páginasProgramação do CLP Micrologix 1400Marciel Dervansoki71% (7)
- CLP1Documento29 páginasCLP1Zickson ManjateAinda não há avaliações
- Resumo CLPsDocumento3 páginasResumo CLPsMatheus NFTAinda não há avaliações
- Família de Controladores Allen-Bradley - RockwellDocumento159 páginasFamília de Controladores Allen-Bradley - RockwellJulio Cesar T ProcopioAinda não há avaliações
- Apostila de CLP - Blocos LogicosDocumento32 páginasApostila de CLP - Blocos Logicosjucadosb100% (4)
- PLC 01Documento51 páginasPLC 01Carlos Eduardo Viana SilvaAinda não há avaliações
- Introdução ao Controle Lógico Programável (CLPDocumento3 páginasIntrodução ao Controle Lógico Programável (CLPIsrael VieiraAinda não há avaliações
- Autómatos Programáveis Rede1Documento5 páginasAutómatos Programáveis Rede1António CarmoAinda não há avaliações
- Apostila CLP Básico PDFDocumento50 páginasApostila CLP Básico PDFLuiz RafaelAinda não há avaliações
- Arquiteturas de Automação com CLPsDocumento7 páginasArquiteturas de Automação com CLPsMaverickrio RioAinda não há avaliações
- Aula #02 - Histórico e Características Técnicas de CLPsDocumento57 páginasAula #02 - Histórico e Características Técnicas de CLPsJoão Marcos OliveiraAinda não há avaliações
- Automatização de Sistemas Mecânicos 2020.2 - Semana 6Documento51 páginasAutomatização de Sistemas Mecânicos 2020.2 - Semana 6Yves FigueiredoAinda não há avaliações
- Produtos: Clps E Programação HardwareDocumento15 páginasProdutos: Clps E Programação HardwarespriesAinda não há avaliações
- Marcelo Eurípedes Da Silva, Fevereiro de 2007Documento40 páginasMarcelo Eurípedes Da Silva, Fevereiro de 2007Rafael Marques100% (2)
- Controladores Programaveis Introducao Conceitual HistoricaDocumento30 páginasControladores Programaveis Introducao Conceitual HistoricaConrado Guimarães100% (1)
- Apostila de CLP EtpcDocumento26 páginasApostila de CLP EtpcPedro Vasconcelos100% (1)
- Módulo I - Evolução Da AutomaçãoDocumento39 páginasMódulo I - Evolução Da AutomaçãoTallys EduardoAinda não há avaliações
- Introdução ao CLP: História e FuncionamentoDocumento50 páginasIntrodução ao CLP: História e FuncionamentoDinho Pinheiro100% (1)
- Arquiteturas Industriais CLPsDocumento4 páginasArquiteturas Industriais CLPsErich BatistaAinda não há avaliações
- CLP - Questionário Sobre CLPDocumento14 páginasCLP - Questionário Sobre CLPPAULO VICTOR FERREIRA DA CRUZAinda não há avaliações
- CLPDocumento5 páginasCLPRener MeloAinda não há avaliações
- Redes IndustriaisDocumento16 páginasRedes IndustriaisEduardo PardinhoAinda não há avaliações
- Apostila de CLPs - LadderDocumento40 páginasApostila de CLPs - Ladderpososviki80% (5)
- CLP ApostilaDocumento73 páginasCLP ApostilaElias MeloAinda não há avaliações
- Automação e Programação de CLPSDocumento8 páginasAutomação e Programação de CLPSTheFabio220478Ainda não há avaliações
- Modulo2 Aula 1 CLPDocumento26 páginasModulo2 Aula 1 CLPCarlos Eduardo AndradeAinda não há avaliações
- Controlador Lógico Programável - DanielDocumento3 páginasControlador Lógico Programável - DanielNatalicio CardosoAinda não há avaliações
- Sistemas de Supervisão: Componentes Físicos e Módulos de ComunicaçãoDocumento34 páginasSistemas de Supervisão: Componentes Físicos e Módulos de ComunicaçãoAlysson DomingosAinda não há avaliações
- Aula9-Redes Na Automacao Industrial Parte1Documento16 páginasAula9-Redes Na Automacao Industrial Parte1wellingtonneguin29Ainda não há avaliações
- Aula 01 - Introducao e Arquitetura Basica Do CLPDocumento29 páginasAula 01 - Introducao e Arquitetura Basica Do CLPPedro Vieira100% (2)
- Desenvolvendo Um Medidor De Álcool Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Medidor De Álcool Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Medidor De Corrente De 4 A 20ma Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Medidor De Corrente De 4 A 20ma Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Medidor De Célula De Carga Modbus Para Leitura No Elipse Com Interface Rs485 No PicNo EverandDesenvolvendo Um Medidor De Célula De Carga Modbus Para Leitura No Elipse Com Interface Rs485 No PicAinda não há avaliações
- Desenvolvendo Um Medidor De Vazão Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Medidor De Vazão Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Termômetro Pt100 Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Termômetro Pt100 Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Gaussímetro Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Gaussímetro Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Controle De Até 16 Canais De Pwm Com Tlc5940 No ArduinoNo EverandControle De Até 16 Canais De Pwm Com Tlc5940 No ArduinoAinda não há avaliações
- Desenvolvendo Um Termômetro Ntc Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Termômetro Ntc Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Higrômetro Para A Rede Can Programado Em ArduinoNo EverandDesenvolvendo Um Higrômetro Para A Rede Can Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Medidor Álcool Modbus Rs232 No Stm32f103 Programado No ArduinoNo EverandDesenvolvendo Um Medidor Álcool Modbus Rs232 No Stm32f103 Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Medidor De Célula De Carga Modbus Para Leitura No Elipse Com Interface Rs232 No ArduinoNo EverandDesenvolvendo Um Medidor De Célula De Carga Modbus Para Leitura No Elipse Com Interface Rs232 No ArduinoAinda não há avaliações
- Aula 2 - Automatismos CabladoDocumento130 páginasAula 2 - Automatismos CabladoNatalicio CardosoAinda não há avaliações
- Senai - Eletrônica Analógica - LaboratórioDocumento174 páginasSenai - Eletrônica Analógica - LaboratórioTiago Barbosa91% (11)
- Como Aprender 400 Palavras em Ingles em 1 MinutoDocumento21 páginasComo Aprender 400 Palavras em Ingles em 1 Minutozimbro94% (51)
- SENSORESDocumento6 páginasSENSORESNatalicio CardosoAinda não há avaliações
- Controlador Lógico ProgramávelDocumento3 páginasControlador Lógico ProgramávelNatalicio CardosoAinda não há avaliações
- Cálculo integral: primitivação de funçõesDocumento10 páginasCálculo integral: primitivação de funçõesNatalicio CardosoAinda não há avaliações
- Controladores Lógicos ProgramáveisDocumento3 páginasControladores Lógicos ProgramáveisNatalicio CardosoAinda não há avaliações
- AS 3 MotoresDocumento1 páginaAS 3 MotoresNatalicio CardosoAinda não há avaliações
- Transistor BipolarDocumento92 páginasTransistor BipolarGledson VillartaAinda não há avaliações
- Controlador Lógico Programável - DanielDocumento3 páginasControlador Lógico Programável - DanielNatalicio CardosoAinda não há avaliações
- Apostila de Eletrônica Digital RecursoDocumento177 páginasApostila de Eletrônica Digital RecursoKleriston SantosAinda não há avaliações
- Controle de FaseDocumento4 páginasControle de FaseAlan SilvaAinda não há avaliações
- Eletronica Basica PDFDocumento150 páginasEletronica Basica PDFhenrix2009Ainda não há avaliações
- Analise GraficosDocumento1 páginaAnalise GraficosNatalicio CardosoAinda não há avaliações
- ManutençãoDocumento119 páginasManutençãoNatalicio CardosoAinda não há avaliações
- Eletroeletrônica IndustrialDocumento50 páginasEletroeletrônica IndustrialLeandro BassiniAinda não há avaliações
- Capa Experiências TchurisDocumento1 páginaCapa Experiências TchurispauloAinda não há avaliações
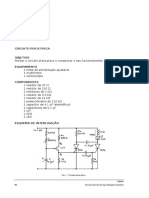
- Circuito Pisca PiscaDocumento2 páginasCircuito Pisca PiscaPaulo CalangoAinda não há avaliações
- Circuitos RetificadoresDocumento47 páginasCircuitos RetificadoresIgorAinda não há avaliações
- 555 Triac-TCA785Documento60 páginas555 Triac-TCA785David AlcantaraAinda não há avaliações
- Immo Vol2Documento96 páginasImmo Vol2Fabio Morales A94% (34)
- Ar Condicion A DoDocumento7 páginasAr Condicion A DoNatalicio CardosoAinda não há avaliações
- Circuito de disparo com PUTDocumento2 páginasCircuito de disparo com PUTNatalicio CardosoAinda não há avaliações
- IntroduçãoDocumento23 páginasIntroduçãoLucas LopesAinda não há avaliações
- Curso técnico mecatrônica pneumáticaDocumento45 páginasCurso técnico mecatrônica pneumáticaNatalicio CardosoAinda não há avaliações
- Apostila Manutenção ElétricaDocumento72 páginasApostila Manutenção ElétricaWandiin ViniciusAinda não há avaliações
- Eletrotécnica SenaiDocumento165 páginasEletrotécnica Senaiarnobiofreires71% (7)
- Tudo Sobre Mecanica Automotiva PDFDocumento244 páginasTudo Sobre Mecanica Automotiva PDFjfrson67% (6)
- Apostila - Módulo 2 - Arquiteto (A) de Soluções PDFDocumento96 páginasApostila - Módulo 2 - Arquiteto (A) de Soluções PDFdiego cancelasAinda não há avaliações
- Apostila Treinamento HuaweiDocumento105 páginasApostila Treinamento HuaweiBernardo Gonçalves100% (1)
- CompTIA Network+ Exam N10-006 (PDFDrive - Com) - 30.en - PTDocumento1 páginaCompTIA Network+ Exam N10-006 (PDFDrive - Com) - 30.en - PTFelipe ZavitoskiAinda não há avaliações
- GoBio - Manual de Usuario Vol 1 v2Documento30 páginasGoBio - Manual de Usuario Vol 1 v2Otavio SoaresAinda não há avaliações
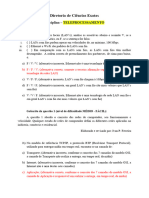
- Teleprocessamento - Questões para Integrada - Exatas-2023 Prof IvanDocumento3 páginasTeleprocessamento - Questões para Integrada - Exatas-2023 Prof IvanBebasso LokoAinda não há avaliações
- Manual WOM 5A Portugues 01-23 SiteDocumento44 páginasManual WOM 5A Portugues 01-23 SiteJhonata MartinsAinda não há avaliações
- Como o TOS funciona no iptablesDocumento3 páginasComo o TOS funciona no iptablesrafa_preussAinda não há avaliações
- Ensino ForenseDocumento7 páginasEnsino ForenseLuis BarbosaAinda não há avaliações
- Progress V8.2A guiaDocumento56 páginasProgress V8.2A guiaBruschis100% (3)
- CCNA 1 RedesDocumento421 páginasCCNA 1 RedesLuiz Ricardo RipardoAinda não há avaliações
- PowerNET P-600 G4 Manual de Instalação e OperaçãoDocumento122 páginasPowerNET P-600 G4 Manual de Instalação e OperaçãoPhodolskiAinda não há avaliações
- E-Book - Manual Completo Do PDVDocumento31 páginasE-Book - Manual Completo Do PDVLogaritmoAinda não há avaliações
- Manual Usuario REVDocumento16 páginasManual Usuario REVEdson Francisco SilvaAinda não há avaliações
- Manual Utilizacao PaebDocumento76 páginasManual Utilizacao Paebmiguelboullosa1Ainda não há avaliações
- Configuração e componentes do CLP Citrino para automação industrialDocumento29 páginasConfiguração e componentes do CLP Citrino para automação industrialgedi30Ainda não há avaliações
- Datasheet UnniTI 1000 Português 01.23Documento5 páginasDatasheet UnniTI 1000 Português 01.23mariaclaraAinda não há avaliações
- Livro - Gerenciamento de Redes de ComputadoresDocumento105 páginasLivro - Gerenciamento de Redes de ComputadoresMateus Machado100% (1)
- Datasheet Link 3g ElsysDocumento2 páginasDatasheet Link 3g ElsysMarketing Satcom0% (1)
- Inversor REFUone - Manual de Instruções REFUone 03K-2T ... 7K-2TDocumento62 páginasInversor REFUone - Manual de Instruções REFUone 03K-2T ... 7K-2TANDRE BORGESAinda não há avaliações
- Especialista em EducacaoexerciciosDocumento16 páginasEspecialista em Educacaoexerciciospjolliva.03Ainda não há avaliações
- Manual Central VRE-250Documento79 páginasManual Central VRE-250MauricioDinizAinda não há avaliações
- Taskalfa 2552ci PTBR-V-1.1Documento2 páginasTaskalfa 2552ci PTBR-V-1.1vaniavargas1964Ainda não há avaliações
- APR - Melhores Praticas para Gerencia de RedesDocumento11 páginasAPR - Melhores Praticas para Gerencia de RedesTetehq100% (1)
- Catálogo de produtos ControlArt 2019Documento18 páginasCatálogo de produtos ControlArt 2019Kenneth BarcottAinda não há avaliações
- Meu Trabalho de Fim de CursoDocumento27 páginasMeu Trabalho de Fim de CursoNélio Evandro LemisAinda não há avaliações
- Manual Do Wise Test Set E1 - 10 - 7Documento107 páginasManual Do Wise Test Set E1 - 10 - 7Tiago Sousa de OliveiraAinda não há avaliações
- Monografia Sacundinbenblog Versão Final (Marcel Cruz)Documento66 páginasMonografia Sacundinbenblog Versão Final (Marcel Cruz)Marcel CruzAinda não há avaliações
- GKM 2000T Manual do UsuárioDocumento34 páginasGKM 2000T Manual do UsuárioleogbrazAinda não há avaliações
- WiFiber AX1800V Manual de UsuárioDocumento99 páginasWiFiber AX1800V Manual de UsuáriodiegofennerAinda não há avaliações
- ZINWELLDocumento6 páginasZINWELLDjoi SouzaAinda não há avaliações