Você também pode gostar
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- 01 - Erro de Estado EstacionárioDocumento16 páginas01 - Erro de Estado EstacionárioNaira Bertouso CanevazziAinda não há avaliações
- Controle e ServomecanismoDocumento23 páginasControle e ServomecanismoGuilherme Pigato PaesAinda não há avaliações
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Documento26 páginasApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1Ainda não há avaliações
- 4 - Laboratório Controlador PD, PI e PIDDocumento13 páginas4 - Laboratório Controlador PD, PI e PIDmarcelAinda não há avaliações
- Instrumentação e Controle 4e5 IntensivoDocumento93 páginasInstrumentação e Controle 4e5 IntensivoGabriel BruschiAinda não há avaliações
- Aula 3 - SDCON IIDocumento22 páginasAula 3 - SDCON IILucas LucasAinda não há avaliações
- Controle LinearDocumento111 páginasControle LinearLeonardo Sirtoli0% (1)
- Erro em Regime PermanenteDocumento20 páginasErro em Regime PermanenteUillian FrancoAinda não há avaliações
- Controlador PID e PID A Dois Graus deDocumento58 páginasControlador PID e PID A Dois Graus deIzoneide LeiteAinda não há avaliações
- ECAC02 2020S1 Aula02Documento44 páginasECAC02 2020S1 Aula02VINICIUS SILVA GONCALVESAinda não há avaliações
- Gabarito Lista de Controle ResolvidaDocumento10 páginasGabarito Lista de Controle ResolvidaSalatyel FellipeAinda não há avaliações
- ZIEGLER&NICHOLSDocumento9 páginasZIEGLER&NICHOLSFabrício SoaresAinda não há avaliações
- Especificações No Domínio Do TempoDocumento41 páginasEspecificações No Domínio Do TempoRedação PaxAinda não há avaliações
- Erro Regime 01Documento5 páginasErro Regime 01Thiago Amado de BritoAinda não há avaliações
- Margem de Ganho e Fase PDFDocumento40 páginasMargem de Ganho e Fase PDFleandrociscotoAinda não há avaliações
- Controle AUTOMATICODocumento286 páginasControle AUTOMATICOChallengerPowerAinda não há avaliações
- Aula 04 - Resposta TemporalDocumento57 páginasAula 04 - Resposta Temporalbersilveira8645Ainda não há avaliações
- Amita Muralikrishna ST6Documento4 páginasAmita Muralikrishna ST6Marcos Paulo Dos SantosAinda não há avaliações
- Diagrama de BodeDocumento11 páginasDiagrama de BodeFábio ZanardoAinda não há avaliações
- 10-Realimentação de EstadosDocumento88 páginas10-Realimentação de EstadosDavid de Almeida FiorilloAinda não há avaliações
- Gabarito Lista de Controle Resolvida PDFDocumento10 páginasGabarito Lista de Controle Resolvida PDFRafaella B. C. RafaAinda não há avaliações
- Lista 02 de Exercícios - Modelo Matemático de Sistemas Dinâmicos PDFDocumento4 páginasLista 02 de Exercícios - Modelo Matemático de Sistemas Dinâmicos PDFNatercia MirandaAinda não há avaliações
- Formulario de TermodinamicaDocumento3 páginasFormulario de TermodinamicaMarcelo Augusto50% (2)
- Trabalho 2 - Ganho CríticoDocumento4 páginasTrabalho 2 - Ganho CríticoMeury BiazattiAinda não há avaliações
- Calculo Do Erro em Regime PermanenteDocumento5 páginasCalculo Do Erro em Regime PermanenteFábio Ferraz0% (1)
- Controle1 - Técnicas de Resposta em FrequênciaDocumento32 páginasControle1 - Técnicas de Resposta em FrequênciatressoengenhariaAinda não há avaliações
- Controle - Exercicios C Gabarito-1Documento6 páginasControle - Exercicios C Gabarito-1Pulqueres Araújo de LemosAinda não há avaliações
- Introdução e Propriedades Da RealimentaçãoDocumento43 páginasIntrodução e Propriedades Da RealimentaçãoEric CerqueiraAinda não há avaliações
- Relatório 3 - Sistemas de Controle 1Documento15 páginasRelatório 3 - Sistemas de Controle 1pipoldchapAinda não há avaliações
- Controle 1: Emerson Ravazzi Pires Da SilvaDocumento43 páginasControle 1: Emerson Ravazzi Pires Da SilvaVictor EduardoAinda não há avaliações
- Colinha P1 - 2022Documento3 páginasColinha P1 - 2022lucas.lopes.paulaAinda não há avaliações
- Lab 00Documento31 páginasLab 00Luiz Fernando Florentino TrevisanAinda não há avaliações
- Controle PID Discreto - Método de Ziegler-Nichols e ExercíciosDocumento7 páginasControle PID Discreto - Método de Ziegler-Nichols e ExercíciosRaniere LiraAinda não há avaliações
- Trab Simulação CDSDDocumento15 páginasTrab Simulação CDSDTássis FernandoAinda não há avaliações
- Sistemas de Controle II - CompensadoresDocumento128 páginasSistemas de Controle II - CompensadoresGiovanna MisquitaAinda não há avaliações
- Aula 16 - Compensadores e Lugar Das RaizesDocumento5 páginasAula 16 - Compensadores e Lugar Das RaizesBruno De MattosAinda não há avaliações
- Aula 10 Pid Via Lugar Das RaizesDocumento41 páginasAula 10 Pid Via Lugar Das Raizesdanitranoster8512Ainda não há avaliações
- Controle e Servomecanismos I Aula 11 01 2023Documento10 páginasControle e Servomecanismos I Aula 11 01 2023Thiago de LimaAinda não há avaliações
- Análise Da Resposta Transitória de Um Sistema de Primeira OrdemDocumento12 páginasAnálise Da Resposta Transitória de Um Sistema de Primeira OrdemGustavoAinda não há avaliações
- Caderno de PraticasDocumento24 páginasCaderno de PraticasPedro Henrique PereiraAinda não há avaliações
- Forno Com Controle RealimentadoDocumento12 páginasForno Com Controle RealimentadoMaicon SponchiadoAinda não há avaliações
- Aula 5 e 6 - Estabilidade de Sistemas de ControleDocumento116 páginasAula 5 e 6 - Estabilidade de Sistemas de ControleJohny SilvaAinda não há avaliações
- Aula 19 - Correção Prova P1 - ApresentaçãoDocumento12 páginasAula 19 - Correção Prova P1 - ApresentaçãoMaicon FrancoAinda não há avaliações
- Ziegler NicholsDocumento3 páginasZiegler NicholsCassiaSobanskiAinda não há avaliações
- SERVOMEC - Aula 02 - Analise de Erro em Regime EstacionarioDocumento17 páginasSERVOMEC - Aula 02 - Analise de Erro em Regime Estacionariofelipe jaimeAinda não há avaliações
- 5a Lista Exercicios Erro em Regime PermanenteDocumento2 páginas5a Lista Exercicios Erro em Regime PermanentesergiojgsAinda não há avaliações
- 2 Funções de Chaveamento PDFDocumento23 páginas2 Funções de Chaveamento PDFmrfeAinda não há avaliações
- Margem de Fase e Ganho - Características de Processos No Domínio Da FreqüênciaDocumento25 páginasMargem de Fase e Ganho - Características de Processos No Domínio Da FreqüênciaEdgar ReisAinda não há avaliações
- Identificação de Função de Transferência A Partir de Dados ExperimentaisDocumento12 páginasIdentificação de Função de Transferência A Partir de Dados ExperimentaisAntonio PeixotoAinda não há avaliações
- Exercícios Preparatórios para Avaliação 1Documento9 páginasExercícios Preparatórios para Avaliação 1Giu InêsAinda não há avaliações
- Erro de RegimeDocumento10 páginasErro de RegimeLais GadelhaAinda não há avaliações
- FX 82MSDocumento8 páginasFX 82MSLau FilAinda não há avaliações
- Obtendo A Declinação Magnética Do Gps Com Base No ArduinoNo EverandObtendo A Declinação Magnética Do Gps Com Base No ArduinoAinda não há avaliações
- Apostila IfmsDocumento40 páginasApostila IfmsDiego CorreiaAinda não há avaliações
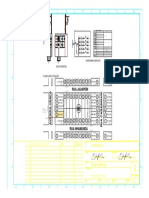
- Prancha Do ProjetoDocumento1 páginaPrancha Do ProjetoJader Lucas PerezAinda não há avaliações
- Modos Gregos DominadoDocumento11 páginasModos Gregos DominadoLeo MoraisAinda não há avaliações
- PowerWorld Simulation (Transmission Line (Documento1 páginaPowerWorld Simulation (Transmission Line (Jader Lucas PerezAinda não há avaliações
- DILSONDocumento1 páginaDILSONJader Lucas PerezAinda não há avaliações
- Guia Meu Espaco CorretorDocumento10 páginasGuia Meu Espaco CorretorJader Lucas PerezAinda não há avaliações
- Lista 03 ArqCompDocumento2 páginasLista 03 ArqCompJader Lucas PerezAinda não há avaliações
- Direito Noturno 2013-1Documento10 páginasDireito Noturno 2013-1Jader Lucas PerezAinda não há avaliações
- TCC F6 Formulario de Acompanhamento Individual Do Aluno de TCCDocumento2 páginasTCC F6 Formulario de Acompanhamento Individual Do Aluno de TCCJader Lucas PerezAinda não há avaliações
- A Central TelefônicaDocumento5 páginasA Central TelefônicaJader Lucas PerezAinda não há avaliações
- Apostila HibernateDocumento37 páginasApostila HibernateJadson Souza FariaAinda não há avaliações
- Saxofone - Partitura - Clássicos - 18 Solos para Saxofone EruditoDocumento32 páginasSaxofone - Partitura - Clássicos - 18 Solos para Saxofone EruditoJader Lucas Perez100% (3)
- Java Web StartDocumento8 páginasJava Web StartEdmar BregagnoliAinda não há avaliações
- Literatura Repelente de Insetos IR 3535Documento3 páginasLiteratura Repelente de Insetos IR 3535Gefson CardosoAinda não há avaliações
- Análise de Estruturas - Estruturas e MáquinasDocumento10 páginasAnálise de Estruturas - Estruturas e MáquinasDiego Santana BragançaAinda não há avaliações
- 01 - CartografiaDocumento11 páginas01 - CartografiaPlínio RibeiroAinda não há avaliações
- Lampada de FendaDocumento64 páginasLampada de FendaVictório NetoAinda não há avaliações
- Dica 0075 - Fiat Línea - DTC P0933 - Falha No Desempenho Do Circuito Hidráulico Da TransmissãoDocumento2 páginasDica 0075 - Fiat Línea - DTC P0933 - Falha No Desempenho Do Circuito Hidráulico Da TransmissãoWiterMarcos100% (1)
- Movimentos Da Terra 2019 HMADocumento4 páginasMovimentos Da Terra 2019 HMAAngela Maria100% (2)
- Relatório 2 - TecMec 2Documento9 páginasRelatório 2 - TecMec 2arthurpbdfAinda não há avaliações
- Relatorio Quimica Experimental 6 PDFDocumento8 páginasRelatorio Quimica Experimental 6 PDFReinaldo RodriguesAinda não há avaliações
- Automação de Caldeiras Fiedler PDFDocumento16 páginasAutomação de Caldeiras Fiedler PDFAdriano Pantaroto100% (1)
- Conhecendo As Válvula Eletrônicas - Eletrônica e Circuitos - ElDocumento7 páginasConhecendo As Válvula Eletrônicas - Eletrônica e Circuitos - Ellah.fisicaAinda não há avaliações
- Catálogo RaychemDocumento5 páginasCatálogo RaychemNailtonPersilAinda não há avaliações
- Espcex Lista 01 Mu Muv PDFDocumento3 páginasEspcex Lista 01 Mu Muv PDFRECRUTA COUTO100% (1)
- Reação Fotoquímica Da BenzofenonaDocumento5 páginasReação Fotoquímica Da BenzofenonaCassiano RibeiroAinda não há avaliações
- Revista Bahiana 2007Documento366 páginasRevista Bahiana 2007Maisa AndradeAinda não há avaliações
- Exercicios - Equilibrio QuimicoDocumento2 páginasExercicios - Equilibrio QuimicoJean FrankAinda não há avaliações
- Antologia de Ficção Científica BrasileiraDocumento100 páginasAntologia de Ficção Científica BrasileiraHerman Augusto SchmitzAinda não há avaliações
- O Corpo Como Pulso - LibermanDocumento12 páginasO Corpo Como Pulso - LibermanYbirá RamaAinda não há avaliações
- Vitali Prova Probabilidade PDFDocumento238 páginasVitali Prova Probabilidade PDFAlexAinda não há avaliações
- Manual Personal Trainning Holmes Place AcademyDocumento350 páginasManual Personal Trainning Holmes Place Academymarco_cadete_189% (9)
- Potiguar GravimetriaDocumento106 páginasPotiguar GravimetriaJander FrazãoAinda não há avaliações
- H604 BraskemDocumento1 páginaH604 BraskemdavidsonnetAinda não há avaliações
- Hidraulica Geral1Documento3 páginasHidraulica Geral1fspAinda não há avaliações
- CN 5º Ano - Celula 1Documento2 páginasCN 5º Ano - Celula 1Marta do Nascimento100% (1)
- Trane - WaveDocumento91 páginasTrane - WaveJunior GaúnaAinda não há avaliações
- Leituras ConstelacoesDocumento33 páginasLeituras ConstelacoesRodrigoPristaAinda não há avaliações
- Fluxograma Operações UnitariasDocumento3 páginasFluxograma Operações UnitariasCarollina marquesAinda não há avaliações
- Associação de Elementos Estruturais - Fundamentos UftDocumento87 páginasAssociação de Elementos Estruturais - Fundamentos UftGabriel Luan Paixão Mota100% (1)
- Catalogo Produtos BPDocumento41 páginasCatalogo Produtos BP69x4Ainda não há avaliações
- FISPQ 1-OctenoDocumento6 páginasFISPQ 1-OctenopeterlantaAinda não há avaliações
- Derivada GeogebraDocumento9 páginasDerivada GeogebraWanderley SouzaAinda não há avaliações