Você também pode gostar
- Aula 04 - Resposta TemporalDocumento57 páginasAula 04 - Resposta Temporalbersilveira8645Ainda não há avaliações
- Erro em regime permanente em sistema de controleDocumento5 páginasErro em regime permanente em sistema de controleThiago Amado de BritoAinda não há avaliações
- Erro Regime Permanente Sistemas Malha Aberta FechadaDocumento20 páginasErro Regime Permanente Sistemas Malha Aberta FechadaUillian FrancoAinda não há avaliações
- Modelagem Matemática de Sistemas Rotacionais MecânicosDocumento5 páginasModelagem Matemática de Sistemas Rotacionais MecânicosRodrigo LimaAinda não há avaliações
- Lista 1 - Teoria de ControleDocumento5 páginasLista 1 - Teoria de ControleVitor AraujoAinda não há avaliações
- Resposta no domínio do tempo: análise com sinais de teste e pólosDocumento23 páginasResposta no domínio do tempo: análise com sinais de teste e pólosbersilveira8645Ainda não há avaliações
- Trabalho2 (Final)Documento33 páginasTrabalho2 (Final)Haroldo FilhoAinda não há avaliações
- Sistemas de primeira ordem Ficha Pratica 02Documento3 páginasSistemas de primeira ordem Ficha Pratica 02Mussa CassamoAinda não há avaliações
- Aula 05 - Modelos de sistemas físicos e função de transferênciaDocumento19 páginasAula 05 - Modelos de sistemas físicos e função de transferênciaFranciele GomesAinda não há avaliações
- Sistemas 1a ordem: equações, respostas & exemplosDocumento28 páginasSistemas 1a ordem: equações, respostas & exemplosbersilveira8645Ainda não há avaliações
- Erros Estáticos em Sistemas de ControleDocumento9 páginasErros Estáticos em Sistemas de ControleRanderson RezierAinda não há avaliações
- Erro em regime permanente em sistemas de controleDocumento5 páginasErro em regime permanente em sistemas de controleFábio Ferraz0% (1)
- Caderno Global Dos Guias Do Lab de Eletrônica de PotênciaDocumento71 páginasCaderno Global Dos Guias Do Lab de Eletrônica de PotênciaElias MacêdoAinda não há avaliações
- p1 Controle AulasDocumento135 páginasp1 Controle AulasjoaoreniAinda não há avaliações
- Exercícios ResolvidosDocumento5 páginasExercícios ResolvidosmuberttiAinda não há avaliações
- 18 - Anexo BDocumento4 páginas18 - Anexo BJoão SilvaAinda não há avaliações
- Representação de sistemas lineares no espaço de estadosDocumento51 páginasRepresentação de sistemas lineares no espaço de estadosSaimon BoeingAinda não há avaliações
- Aula5 APNP - Controlador L. Das Raízes - Atraso de FaseDocumento36 páginasAula5 APNP - Controlador L. Das Raízes - Atraso de Fasemanolomay838Ainda não há avaliações
- Sistemas de controle discretosDocumento76 páginasSistemas de controle discretoswhatahellAinda não há avaliações
- Analise de Sistemas No Dominio de FrequenciaDocumento6 páginasAnalise de Sistemas No Dominio de FrequenciaRedação PaxAinda não há avaliações
- Projeto e simulação de compensadores por avanço e atraso de faseDocumento8 páginasProjeto e simulação de compensadores por avanço e atraso de fasecaAinda não há avaliações
- Aula 16 - Compensadores e Lugar Das RaizesDocumento5 páginasAula 16 - Compensadores e Lugar Das RaizesBruno De MattosAinda não há avaliações
- UFSJ Seminário Sistemas Primeira e Segunda OrdemDocumento28 páginasUFSJ Seminário Sistemas Primeira e Segunda OrdemKlaus MaloneAinda não há avaliações
- Controle - Exercicios C Gabarito-1Documento6 páginasControle - Exercicios C Gabarito-1Pulqueres Araújo de LemosAinda não há avaliações
- Modelos de Sistemas FluídicosDocumento14 páginasModelos de Sistemas FluídicosIvo LeoniAinda não há avaliações
- Método λ-P para sintonia PIDDocumento4 páginasMétodo λ-P para sintonia PIDMarcelo Andrade SantiagoAinda não há avaliações
- Controle de sistemas: erros em regime permanenteDocumento43 páginasControle de sistemas: erros em regime permanenteVictor EduardoAinda não há avaliações
- Introdução à realimentação em sistemas de controleDocumento43 páginasIntrodução à realimentação em sistemas de controleEric CerqueiraAinda não há avaliações
- Análise temporal de sistemas de controlo contínuosDocumento11 páginasAnálise temporal de sistemas de controlo contínuosRedação PaxAinda não há avaliações
- Sistemas de Controle - 05 - Especificação Da Resposta Dinâmica e EstabilidadeDocumento9 páginasSistemas de Controle - 05 - Especificação Da Resposta Dinâmica e EstabilidadeCleber RodriguesAinda não há avaliações
- Controle - Tópico 5Documento6 páginasControle - Tópico 5kjonathas95Ainda não há avaliações
- 1aLista_Documento4 páginas1aLista_Carol BandoliAinda não há avaliações
- Modelagem de circuitos e sistemas mecânicos no MATLAB/SimulinkDocumento7 páginasModelagem de circuitos e sistemas mecânicos no MATLAB/SimulinkJuscelino RodriguesAinda não há avaliações
- AULA CPDocumento51 páginasAULA CPLuís SalvadorAinda não há avaliações
- Análise de circuito RLC série através de medições com osciloscópioDocumento12 páginasAnálise de circuito RLC série através de medições com osciloscópioRodrigo GuimarãesAinda não há avaliações
- Caderno Questoes Eletronica Ed113 FinalDocumento27 páginasCaderno Questoes Eletronica Ed113 Finalzdn100% (1)
- Circuito Derivador RCDocumento10 páginasCircuito Derivador RCCicero FrancivanAinda não há avaliações
- Análise de estabilidade de sistema de controle de nível de líquido com e sem atraso de transporteDocumento15 páginasAnálise de estabilidade de sistema de controle de nível de líquido com e sem atraso de transporteAna Luiza MoraisAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- Controle de Processos e InstrumentaçãoDocumento39 páginasControle de Processos e InstrumentaçãoLUCAS RODRIGUES OLIVEIRAAinda não há avaliações
- Prova - ServomecanismoDocumento7 páginasProva - ServomecanismoCamila Marques CoutoAinda não há avaliações
- Artigo Modelagem Caixa CinzaDocumento7 páginasArtigo Modelagem Caixa CinzaanaaraujoAinda não há avaliações
- Lista de exercícios para prova de sistemas de controleDocumento6 páginasLista de exercícios para prova de sistemas de controleDionizioAinda não há avaliações
- Aula - Cap6 - v221101 - Controle MF - Parte 1 - Controle PDocumento81 páginasAula - Cap6 - v221101 - Controle MF - Parte 1 - Controle Prenatoalex.17Ainda não há avaliações
- Roteiro 3Documento13 páginasRoteiro 3luis volpeAinda não há avaliações
- Sistema de Controle para Posicionamento de Um Elevador 2020Documento11 páginasSistema de Controle para Posicionamento de Um Elevador 2020Ton marquesAinda não há avaliações
- Apostila de Controle Linear IDocumento240 páginasApostila de Controle Linear IWeslin SavarisAinda não há avaliações
- Projeto de controladores em cascataDocumento40 páginasProjeto de controladores em cascataMk DuarteAinda não há avaliações
- Aula 3Documento51 páginasAula 3Gabriel ModestoAinda não há avaliações
- Análise estabilidade sistema potênciaDocumento13 páginasAnálise estabilidade sistema potênciaNetoSousaAinda não há avaliações
- Modelagem no domínio do tempoDocumento67 páginasModelagem no domínio do tempoEmilly CarvalhoAinda não há avaliações
- Controle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzDocumento28 páginasControle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzGnu_saraAinda não há avaliações
- Sistemas de Controle AutomáticoDocumento17 páginasSistemas de Controle AutomáticoleagueOfHU3 BRAinda não há avaliações
- Lista Exercicios LRDocumento3 páginasLista Exercicios LRGustavo VianaAinda não há avaliações
- Instrumentação e Controle 4e5 IntensivoDocumento93 páginasInstrumentação e Controle 4e5 IntensivoGabriel BruschiAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Análise temporal de sistemas de controlo contínuosDocumento11 páginasAnálise temporal de sistemas de controlo contínuosRedação PaxAinda não há avaliações
- Analise de Sistemas No Dominio de FrequenciaDocumento6 páginasAnalise de Sistemas No Dominio de FrequenciaRedação PaxAinda não há avaliações
- Ficha de Exercícios No 1Documento5 páginasFicha de Exercícios No 1Redação PaxAinda não há avaliações
- Universidade Estadual de Maringá: Mestrado Profissional em Ensino de HistóriaDocumento148 páginasUniversidade Estadual de Maringá: Mestrado Profissional em Ensino de HistóriaRedação PaxAinda não há avaliações
- Missal Romano - ICARH - Rito de Ordenação EpiscopalDocumento25 páginasMissal Romano - ICARH - Rito de Ordenação EpiscopalRedação PaxAinda não há avaliações
- A Misericórdia de DeusDocumento56 páginasA Misericórdia de DeusRedação PaxAinda não há avaliações
- Manual do Aluno Village Park DogDocumento4 páginasManual do Aluno Village Park DogSadm SorocabaAinda não há avaliações
- CatalogoDocumento72 páginasCatalogoQue torcida é essa.Ainda não há avaliações
- SimposioANPEPP 2008Documento178 páginasSimposioANPEPP 2008Hábilis Augusto BiazottoAinda não há avaliações
- Estatuto do servidor DiademaDocumento46 páginasEstatuto do servidor Diademajmaj jmajAinda não há avaliações
- Avaliação em Educação Física AdaptadaDocumento4 páginasAvaliação em Educação Física AdaptadaBianca MeloAinda não há avaliações
- Automatização residencial: projeto de instalação elétricaDocumento14 páginasAutomatização residencial: projeto de instalação elétricaLucas MatosAinda não há avaliações
- Procedimento Operacional Padrão: TituloDocumento7 páginasProcedimento Operacional Padrão: TituloDeyvid OliveiraAinda não há avaliações
- Conceitualização Cognitiva: Pensamentos, Crenças e EstratégiasDocumento5 páginasConceitualização Cognitiva: Pensamentos, Crenças e EstratégiasMauricio Marane0% (1)
- Orgânica3 Hidrocarbonetos (Parte1)Documento21 páginasOrgânica3 Hidrocarbonetos (Parte1)Lorenzo RamosAinda não há avaliações
- Modulo 2 FTFDocumento16 páginasModulo 2 FTFAmanda SáAinda não há avaliações
- Triângulos - ClassificaçãoDocumento21 páginasTriângulos - ClassificaçãoDanAinda não há avaliações
- Abordagem metodológica para problemas complexos em planos diretores hospitalaresDocumento40 páginasAbordagem metodológica para problemas complexos em planos diretores hospitalaresJeffrey HaithAinda não há avaliações
- Growth suplementos pagamentoDocumento1 páginaGrowth suplementos pagamentoEu sou o pai do YOUTUBEAinda não há avaliações
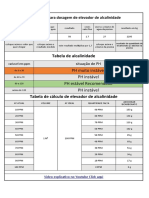
- Tabela de AlcalinidadeDocumento1 páginaTabela de AlcalinidadeedsonAinda não há avaliações
- Receção de HotelDocumento117 páginasReceção de HotelBrielSilcaAinda não há avaliações
- l086dz FullDocumento3 páginasl086dz FullluiztigrefreitasAinda não há avaliações
- A Vida de Uma Princesa Árabe Revela a Opressão das MulheresDocumento144 páginasA Vida de Uma Princesa Árabe Revela a Opressão das MulheresMarcos Bezerra da CostaAinda não há avaliações
- Portugal - Marcas de Contrast Aria e de ResponsabilidadeDocumento3 páginasPortugal - Marcas de Contrast Aria e de ResponsabilidadeClara RamosAinda não há avaliações
- Itens HAMP Exportado 22-01-2019 10-46-53 872Documento5 páginasItens HAMP Exportado 22-01-2019 10-46-53 872Senhor FanáticoAinda não há avaliações
- A concepção durkheimiana da regulação moral da economiaDocumento20 páginasA concepção durkheimiana da regulação moral da economiaMatheus CostaAinda não há avaliações
- Lista Magias D&D 5E MAGODocumento33 páginasLista Magias D&D 5E MAGOPedro Faria XavierAinda não há avaliações
- Análise de Risco para Supressão VegetalDocumento12 páginasAnálise de Risco para Supressão VegetalAdilson Sousa LimaAinda não há avaliações
- Relatório Financeiro 2022Documento3 páginasRelatório Financeiro 2022Diogo FranciscoAinda não há avaliações
- Características à vazio e de curto-circuito de máquinas síncronasDocumento6 páginasCaracterísticas à vazio e de curto-circuito de máquinas síncronasCláudia FonsecaAinda não há avaliações
- Virtual Wi Fi Router Download BaixakiDocumento8 páginasVirtual Wi Fi Router Download BaixakiPauloAinda não há avaliações
- Bpo - 2291-2291-1-PBDocumento18 páginasBpo - 2291-2291-1-PBalesorianoAinda não há avaliações
- 2815-lms FileDocumento5 páginas2815-lms FileShayrula AliceAinda não há avaliações
- Mapa - Far - Farmacologia Aplicada - 52-2023Documento2 páginasMapa - Far - Farmacologia Aplicada - 52-2023Cavalini Assessoria AcadêmicaAinda não há avaliações
- CO MUELLER - Bomba KSB 050-032-250 - Folha de DadosDocumento6 páginasCO MUELLER - Bomba KSB 050-032-250 - Folha de DadosmarceloAinda não há avaliações