Você também pode gostar
- Anexo L Memorial Energ FotovDocumento15 páginasAnexo L Memorial Energ FotovMendes Costa NetoAinda não há avaliações
- RelatóriosDocumento25 páginasRelatóriosnilsocristovaolAinda não há avaliações
- Trabalho Eletronica de Potencia - Ronaldo Torres Da SilveiraDocumento6 páginasTrabalho Eletronica de Potencia - Ronaldo Torres Da SilveiraRonaldoDaSilveiraAinda não há avaliações
- Actividade Práctica em Grupo 02 (Prazo de Entrega 03 04 2023)Documento6 páginasActividade Práctica em Grupo 02 (Prazo de Entrega 03 04 2023)Dj-Dénny DjrAinda não há avaliações
- Memorial de Instalação FotovoltaicoDocumento7 páginasMemorial de Instalação Fotovoltaicodougllasw crosser150Ainda não há avaliações
- Determinação de Curva Característica de Arranjo FotovoltaicoDocumento8 páginasDeterminação de Curva Característica de Arranjo FotovoltaicoRhayan TelesAinda não há avaliações
- Sensores e Transdutores FotoelétricosDocumento14 páginasSensores e Transdutores FotoelétricosKAROLINA AMANDA SCHUBERTAinda não há avaliações
- Conteúdo CompletoDocumento41 páginasConteúdo CompletoAdriano SantosAinda não há avaliações
- ACFrOgCTtNFbgACSM00yYQu8KD FJDyq4qB7eGzjdYtJCJBDJs8xVEsh7R0Vvn00Ts150i2t SgEBxtqCuB7Czvf4MM0zf1skf8gElpTsR9QUYX6GmRo2JBBx5A0YI4ermPi8c NSZ ldkILRvHBDocumento6 páginasACFrOgCTtNFbgACSM00yYQu8KD FJDyq4qB7eGzjdYtJCJBDJs8xVEsh7R0Vvn00Ts150i2t SgEBxtqCuB7Czvf4MM0zf1skf8gElpTsR9QUYX6GmRo2JBBx5A0YI4ermPi8c NSZ ldkILRvHBJoao LuisAinda não há avaliações
- Servo MotoresDocumento12 páginasServo Motoreseric976100% (1)
- Dispositivo luminoso com LEDs giratóriosDocumento5 páginasDispositivo luminoso com LEDs giratóriosSandra MarkivAinda não há avaliações
- Dimmer com TRIAC controla velocidade de motores e intensidade de luzesDocumento4 páginasDimmer com TRIAC controla velocidade de motores e intensidade de luzesRosalvaDalcinAinda não há avaliações
- Trabalho de SCRDocumento11 páginasTrabalho de SCRIvan GujamoAinda não há avaliações
- Controle de velocidade para motores CC usando PWMDocumento15 páginasControle de velocidade para motores CC usando PWMSilvio Gomes dos SantosAinda não há avaliações
- Controle de protótipo de roda giganteDocumento9 páginasControle de protótipo de roda giganteJoana NogueiraAinda não há avaliações
- Dimensionamento Sistema Fotovoltaico para Bombeamento ÁguaDocumento22 páginasDimensionamento Sistema Fotovoltaico para Bombeamento ÁguaHugo PereiraAinda não há avaliações
- Memorial DescritivoDocumento13 páginasMemorial DescritivoLaio Andrade Garcia100% (1)
- Memorial Descritivo Do Sistema de Energia Solar 0,93 KWPDocumento17 páginasMemorial Descritivo Do Sistema de Energia Solar 0,93 KWPLucas TeixeiraAinda não há avaliações
- Atividade Final - Fundamentos Da Automação Industrial - Matheus Silva Dos ReisDocumento5 páginasAtividade Final - Fundamentos Da Automação Industrial - Matheus Silva Dos ReispriscilapiualmeidaAinda não há avaliações
- Relatório 07 - EletricidadeDocumento15 páginasRelatório 07 - EletricidadeDaniel RodrigoAinda não há avaliações
- Controle de iluminação residencial com ArduínoDocumento7 páginasControle de iluminação residencial com ArduínoJose NarciAinda não há avaliações
- Atividade Final - Fundamentos Da Automação Industrial - Lidiney SiqueiraDocumento7 páginasAtividade Final - Fundamentos Da Automação Industrial - Lidiney Siqueiraelizangela100% (2)
- RELATÓRIO TÉCNICO-finalDocumento14 páginasRELATÓRIO TÉCNICO-finalUilis SantosAinda não há avaliações
- Tutorial Eletronica - Motor de PassoDocumento16 páginasTutorial Eletronica - Motor de Passofabricio moletta0% (1)
- Projeto de energia solar para comunidade ribeirinha na AmazôniaDocumento14 páginasProjeto de energia solar para comunidade ribeirinha na AmazôniaWillian HellerAinda não há avaliações
- Projeto Ponte HDocumento7 páginasProjeto Ponte HItamar JuniorAinda não há avaliações
- Orçamento Henrique 8p 12Documento8 páginasOrçamento Henrique 8p 12Henrick VelosoAinda não há avaliações
- Memorial - Descritivo.ufv .Lanchonete - Villa Lobos 2Documento8 páginasMemorial - Descritivo.ufv .Lanchonete - Villa Lobos 2Joel CesarioAinda não há avaliações
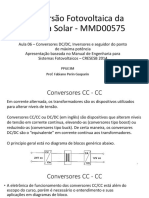
- Conversão Fotovoltaica: Conversores DC/DC, Inversores e MPPTDocumento47 páginasConversão Fotovoltaica: Conversores DC/DC, Inversores e MPPTManoel Henrique AlvesAinda não há avaliações
- Manual Do Utilizador - Residencial - Rev 2Documento14 páginasManual Do Utilizador - Residencial - Rev 2betoknigthAinda não há avaliações
- Corrente transitória de partida em motor monofásico medidaDocumento4 páginasCorrente transitória de partida em motor monofásico medidaHébert VieiraAinda não há avaliações
- Como funciona o alternadorDocumento8 páginasComo funciona o alternadorThiago MillerAinda não há avaliações
- Levitação magnética didáticaDocumento12 páginasLevitação magnética didáticaVictor CastroAinda não há avaliações
- Projeto Rio-WiFiDocumento3 páginasProjeto Rio-WiFimega lixoAinda não há avaliações
- Relatorio 2 MaqDocumento11 páginasRelatorio 2 MaqFernando BatistaAinda não há avaliações
- Laboratório de Dispositivos EletrônicosDocumento43 páginasLaboratório de Dispositivos EletrônicosJoao PauloAinda não há avaliações
- Sistema híbrido solar-eólico com inversores mestre-escravoDocumento3 páginasSistema híbrido solar-eólico com inversores mestre-escravoIgor Moreira PiazentiniAinda não há avaliações
- Guia Do Eletricista PDFDocumento192 páginasGuia Do Eletricista PDFKaio Berçan100% (2)
- Memorial DescritivoDocumento16 páginasMemorial DescritivoRogério de SouzaAinda não há avaliações
- Artigo Sharlene - Análise de Desempenho Mai TerracesDocumento7 páginasArtigo Sharlene - Análise de Desempenho Mai TerracesSharleneAinda não há avaliações
- 1554-Arquivo Do Trabalho-6738-1-10-20201103Documento11 páginas1554-Arquivo Do Trabalho-6738-1-10-20201103Gabriel MessiasAinda não há avaliações
- Acesso micro e minigeracao renováveis rede distribuiçãoDocumento26 páginasAcesso micro e minigeracao renováveis rede distribuiçãoAnderson GasparAinda não há avaliações
- Fundamentos Automação: Avaliação FinalDocumento7 páginasFundamentos Automação: Avaliação FinalEduardo Monteiro100% (1)
- No-Break Curso Completo ManutençãoDocumento64 páginasNo-Break Curso Completo Manutençãoapi-384245992% (13)
- Curso Completo de Nobreak SMS PDFDocumento256 páginasCurso Completo de Nobreak SMS PDFEstevao Alves100% (1)
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- Projetos De Eletrônica De Potência Usando O ArduinoNo EverandProjetos De Eletrônica De Potência Usando O ArduinoAinda não há avaliações
- Projetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte INo EverandProjetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte IAinda não há avaliações
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ViNo EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ViAinda não há avaliações
- Os JesuítasDocumento1 páginaOs JesuítasluiliosmAinda não há avaliações
- CCO2 EconomiaDocumento94 páginasCCO2 EconomiaRenata OrmundoAinda não há avaliações
- Como Tornar-Se Um LiderDocumento56 páginasComo Tornar-Se Um LiderJosé Roberto Neves86% (7)
- Curso Completo de Técnica VocalDocumento26 páginasCurso Completo de Técnica VocalMarcelo García DourromAinda não há avaliações
- Trabalho de Forno de InducaoDocumento6 páginasTrabalho de Forno de Inducaoluiliosm100% (1)
- Formulario IntegraisDocumento1 páginaFormulario Integraisronnymec100% (1)
- Trabalho de Forno de InducaoDocumento6 páginasTrabalho de Forno de Inducaoluiliosm100% (1)
- Simulado Avaliação PsicologicaDocumento6 páginasSimulado Avaliação PsicologicaBruna De Oliveira Novais100% (2)
- GET GO COLLOCATIONSDocumento7 páginasGET GO COLLOCATIONSKleider KennedyAinda não há avaliações
- 3 - (Consumo de Chocolate) - Ensino MédioDocumento3 páginas3 - (Consumo de Chocolate) - Ensino MédioFrank InácioAinda não há avaliações
- TCC - Desenvolvimento Aplicativo para o ROS (Robotic Operating System)Documento101 páginasTCC - Desenvolvimento Aplicativo para o ROS (Robotic Operating System)Caio TeixeiraAinda não há avaliações
- Relatório Aula Pratica EnsilagemDocumento6 páginasRelatório Aula Pratica EnsilagemPollyanna RosaAinda não há avaliações
- Arquitetura Jesuítica No BrasilDocumento40 páginasArquitetura Jesuítica No Brasilrenatoribeiro_be100% (1)
- Quarto de Despejo - Dados Da ObraDocumento9 páginasQuarto de Despejo - Dados Da ObraCamila DovalAinda não há avaliações
- Orientação de carreiraDocumento9 páginasOrientação de carreiraAline RodriguesAinda não há avaliações
- Diario Oficial RR 22.06.2023Documento114 páginasDiario Oficial RR 22.06.2023Rodrigo KanazawarkpbscribdAinda não há avaliações
- Relato EstágioDocumento3 páginasRelato EstágioChristiane MeloAinda não há avaliações
- Semiologia Do Locomotor EquinoDocumento6 páginasSemiologia Do Locomotor EquinoLyah LamarckAinda não há avaliações
- Habilidades 2022-CADERNO PROVA-Percepcao VisualDocumento12 páginasHabilidades 2022-CADERNO PROVA-Percepcao VisualPimentinha DoceAinda não há avaliações
- PROJETO DE VIDA - Aula 1 - Eu-Meus Amigos e o MundoDocumento4 páginasPROJETO DE VIDA - Aula 1 - Eu-Meus Amigos e o MundoSayo Bernardino Monfradini100% (1)
- Diretrizes Curriculares NacionaisDocumento14 páginasDiretrizes Curriculares NacionaisFelipe BernardoAinda não há avaliações
- Apostila Estatística Mat Vol 2 2008Documento23 páginasApostila Estatística Mat Vol 2 2008anon-92473100% (2)
- Saeco Vienna Ocs Manual de InstrucoesDocumento36 páginasSaeco Vienna Ocs Manual de InstrucoesHeli Tati Morais100% (1)
- Ficha PerfilDocumento4 páginasFicha Perfilcintia.limaAinda não há avaliações
- Projeto Colcha de RetalhosDocumento4 páginasProjeto Colcha de RetalhosMari BuzzanteAinda não há avaliações
- Cartilha de Inspecao e Manuseio Movimentacao Segura de CargasDocumento28 páginasCartilha de Inspecao e Manuseio Movimentacao Segura de CargasLuisFernandoOpitzAinda não há avaliações
- TA2 - Foundation FieldbusDocumento20 páginasTA2 - Foundation FieldbusMarcus Winicius de OliveiraAinda não há avaliações
- Mandala astrologica e suas 12 CasasDocumento4 páginasMandala astrologica e suas 12 CasasMeu Redondinho DonutsAinda não há avaliações
- Apostila SEED HistóriaDocumento400 páginasApostila SEED HistóriaCadernos EJA100% (9)
- Técnico em EnfermagemDocumento3 páginasTécnico em EnfermagemHellohayne CostaAinda não há avaliações
- Capítulo 1001Documento70 páginasCapítulo 1001Mércia SilveiraAinda não há avaliações
- Tagmar Criticas e SugestõesDocumento15 páginasTagmar Criticas e SugestõesEduardo EwertonAinda não há avaliações
- Bazin Mito Cinema TotalDocumento4 páginasBazin Mito Cinema TotalAmaterasuAinda não há avaliações
- Apostila Fitopatologia UFRGSDocumento83 páginasApostila Fitopatologia UFRGSElizangela PereiraAinda não há avaliações
- Manual GRTA-2DDocumento30 páginasManual GRTA-2DGmeyer equipamentosAinda não há avaliações
- Principais tipos de aparelhos de mediçãoDocumento4 páginasPrincipais tipos de aparelhos de mediçãoElsa SilvaAinda não há avaliações
- Gonzaga Duque - Crítica, Arte e Experiência Da Modernidade PDFDocumento112 páginasGonzaga Duque - Crítica, Arte e Experiência Da Modernidade PDFEduardo RosalAinda não há avaliações