Você também pode gostar
- Aula 03 Vibracoes MecanicasDocumento46 páginasAula 03 Vibracoes MecanicasGilmar JuniorAinda não há avaliações
- Análise do custo logístico de alternativas para aumento da competitividade de uma cadeia logística portuáriaNo EverandAnálise do custo logístico de alternativas para aumento da competitividade de uma cadeia logística portuáriaAinda não há avaliações
- Eco StickDocumento117 páginasEco StickleandromcsAinda não há avaliações
- 9 - Análise ModalDocumento10 páginas9 - Análise ModalArthur RafaelAinda não há avaliações
- Catalogo UNIKDocumento62 páginasCatalogo UNIKRodrigo Silva100% (1)
- Controle de Pagamento de AluguelDocumento6 páginasControle de Pagamento de AluguelMayckson CostaAinda não há avaliações
- Ruido Svi Beilum CalixtoDocumento28 páginasRuido Svi Beilum CalixtothermixAinda não há avaliações
- Voz 2Documento2 páginasVoz 2Oboe o Som da AlmaAinda não há avaliações
- Fundamentos de Controle de Ruído IndustrialDocumento14 páginasFundamentos de Controle de Ruído IndustrialRoberto Moscarelli CorralAinda não há avaliações
- Icms Na Construção CivilDocumento9 páginasIcms Na Construção CivilframiguelAinda não há avaliações
- Relatório Laboratorio I - Dinamica de Estruturas - Ensaios Experimentais de Vibração em Uma Viga Engastada-Livre Empregando Excitação Por ImpactoDocumento57 páginasRelatório Laboratorio I - Dinamica de Estruturas - Ensaios Experimentais de Vibração em Uma Viga Engastada-Livre Empregando Excitação Por ImpactoAlexandre Medina100% (1)
- Orçamento PessoalDocumento4 páginasOrçamento Pessoalcarlos0912Ainda não há avaliações
- Introdução A Dinamica de EstruturasDocumento21 páginasIntrodução A Dinamica de EstruturasGonçalo Camelo Oliveira50% (2)
- AULA 10 - Vibração Forçada em Sistemas Com 1 GDL e Excitação Periódica Não-HarmônicaDocumento28 páginasAULA 10 - Vibração Forçada em Sistemas Com 1 GDL e Excitação Periódica Não-Harmônicaobama_ufopAinda não há avaliações
- Resolução 1010 - Atribuições Engenheiro CivilDocumento98 páginasResolução 1010 - Atribuições Engenheiro CivilMatheusAinda não há avaliações
- Apostila Vibrações 2015 FEIDocumento66 páginasApostila Vibrações 2015 FEIJhony LopesAinda não há avaliações
- Análise Dinâmica Pelo Método de Elementos FinitosDocumento86 páginasAnálise Dinâmica Pelo Método de Elementos FinitossaidmsrochaAinda não há avaliações
- Eng297 Aula07Acustica PalestraDocumento48 páginasEng297 Aula07Acustica PalestraAnonymous ByopfdAinda não há avaliações
- Física Do SomDocumento12 páginasFísica Do SomJoão CarditaAinda não há avaliações
- Planilha de Controle Financeiro 2Documento2 páginasPlanilha de Controle Financeiro 2edvanAinda não há avaliações
- Isolamento de VibraçõesDocumento9 páginasIsolamento de VibraçõesLaura CampesattoAinda não há avaliações
- AERODINÂMICA Slides - Ruella-MinDocumento57 páginasAERODINÂMICA Slides - Ruella-MinGuilherme CayresAinda não há avaliações
- Vibrações Mecânicas - Aula 1Documento31 páginasVibrações Mecânicas - Aula 1Isaque SantosAinda não há avaliações
- Prova Engenharia CivilDocumento12 páginasProva Engenharia CivilMarcel TatebeAinda não há avaliações
- Resumão Fundamentos Controle Ruido IndustrialDocumento11 páginasResumão Fundamentos Controle Ruido IndustrialCamila Silva0% (2)
- Aula 06 - Ventilação Natural - Parte 01Documento55 páginasAula 06 - Ventilação Natural - Parte 01Anderson BeckerAinda não há avaliações
- Unidade III - Vibrações de Sistemas Com 1 Grau de LiberdadeDocumento89 páginasUnidade III - Vibrações de Sistemas Com 1 Grau de LiberdadeLuiz DanielAinda não há avaliações
- Guilherme Neves - Manual de Lógica para Concursos - Ano 2010Documento250 páginasGuilherme Neves - Manual de Lógica para Concursos - Ano 2010Caio César100% (3)
- Apostila de Conforto Acústico + Exercícios PDFDocumento35 páginasApostila de Conforto Acústico + Exercícios PDFarqrottaAinda não há avaliações
- Extensometria Apostila Edison Da RosaDocumento137 páginasExtensometria Apostila Edison Da RosaMariana ReisAinda não há avaliações
- VibracoesDocumento34 páginasVibracoessirilocoAinda não há avaliações
- Conceito de Onda e SomDocumento41 páginasConceito de Onda e SomJohnnataLuizAinda não há avaliações
- Vibrações MecânicasDocumento14 páginasVibrações MecânicasIkaro MatosAinda não há avaliações
- Resistência Mecânica e Tribologia Nos BiomateriaisDocumento36 páginasResistência Mecânica e Tribologia Nos BiomateriaisTuany NevesAinda não há avaliações
- E-Book Oportunidades de Negócios ACM V2Documento21 páginasE-Book Oportunidades de Negócios ACM V2Pastor Adriano Leal100% (1)
- Comportamento Mecânico Dos MateriaisDocumento31 páginasComportamento Mecânico Dos Materiaisnunes14Ainda não há avaliações
- (TCC) Analise Da Estrutura de Um Carro de Corrida - Bani Valerio Alves Pereira PDFDocumento114 páginas(TCC) Analise Da Estrutura de Um Carro de Corrida - Bani Valerio Alves Pereira PDFWilliams OliveiraAinda não há avaliações
- Fisica Do SomDocumento51 páginasFisica Do SomAna LopesAinda não há avaliações
- Vibrações TransientesDocumento20 páginasVibrações TransientesEleno RibeiroAinda não há avaliações
- Vibracao Transversal VigaDocumento22 páginasVibracao Transversal VigaBrenno Moura MouraAinda não há avaliações
- Estudo de Caso Fissuras Originadas Nas Argamassas de Assentamento e RevestimentoDocumento48 páginasEstudo de Caso Fissuras Originadas Nas Argamassas de Assentamento e RevestimentoLucas FreitasAinda não há avaliações
- FACHADAS VidroDocumento7 páginasFACHADAS VidroLincoln CesarAinda não há avaliações
- Aula 25 - VidroDocumento35 páginasAula 25 - VidroVinícius FrançaAinda não há avaliações
- Deformações em Estruturas de ConcretoDocumento80 páginasDeformações em Estruturas de ConcretoRICARDOAinda não há avaliações
- Algoritmo Genético para Resolução Do Problema Do CaixeiroDocumento13 páginasAlgoritmo Genético para Resolução Do Problema Do CaixeirosgazoniAinda não há avaliações
- Catalogo Sistema Polimento 3MDocumento20 páginasCatalogo Sistema Polimento 3MFábioLuizGonçalvesAinda não há avaliações
- Elementos de Maquinas III (Apostila 2008-01)Documento163 páginasElementos de Maquinas III (Apostila 2008-01)Ellichtenberb100% (1)
- Estudo Sobre Fixação de Peças Plásticas Por Meio de Snapfit - Zorzeto-jr-eduardo-VerginioDocumento175 páginasEstudo Sobre Fixação de Peças Plásticas Por Meio de Snapfit - Zorzeto-jr-eduardo-Verginiojuscelino_santos_13100% (1)
- Principais Mudanças No Novo Texto Da NR 10Documento30 páginasPrincipais Mudanças No Novo Texto Da NR 10Christenes AlvesAinda não há avaliações
- Vibrações MecânicasDocumento17 páginasVibrações MecânicasRodrigo VicenteAinda não há avaliações
- FEI Aula 03 Paquímetro e MicrômetroDocumento7 páginasFEI Aula 03 Paquímetro e MicrômetroilledratAinda não há avaliações
- Projeto de Superestrutura Viária1Documento10 páginasProjeto de Superestrutura Viária1Mailson CamposAinda não há avaliações
- Selective Laser Sintering (SLS)Documento24 páginasSelective Laser Sintering (SLS)Guilherme Dias ZarurAinda não há avaliações
- Aula 4 - UsinabilidadeDocumento85 páginasAula 4 - UsinabilidadeLourivaldovieirajuniAinda não há avaliações
- TCC Hidroconformacao em Tubos de Aco-Ivan Lairton ThonDocumento114 páginasTCC Hidroconformacao em Tubos de Aco-Ivan Lairton ThonRichard De Medeiros CastroAinda não há avaliações
- Aplicações Práticas Dos Strain GagesDocumento64 páginasAplicações Práticas Dos Strain GagesCarlos JúniorAinda não há avaliações
- Corte de Chapa Por CisalhamentoDocumento65 páginasCorte de Chapa Por CisalhamentoEdercleyMouraAinda não há avaliações
- Raio Efetivo FreioDocumento29 páginasRaio Efetivo FreioSergio SachtAinda não há avaliações
- TCC Alexandro Egidio Neis - Versao Final PDFDocumento92 páginasTCC Alexandro Egidio Neis - Versao Final PDFregi100% (1)
- Livro Curso Basico ViolãoDocumento20 páginasLivro Curso Basico ViolãoJose Prado100% (1)
- Refervedor Tipo Termosifão - Equipamentos de Troca Térmica PDFDocumento6 páginasRefervedor Tipo Termosifão - Equipamentos de Troca Térmica PDFJose PradoAinda não há avaliações
- Escoamento InternoDocumento148 páginasEscoamento InternoJose PradoAinda não há avaliações
- Processos Químicos Industriais - AnchietaDocumento66 páginasProcessos Químicos Industriais - AnchietaMilton Mauad100% (2)
- Refervedor Tipo Termosifão - Equipamentos de Troca Térmica PDFDocumento6 páginasRefervedor Tipo Termosifão - Equipamentos de Troca Térmica PDFJose PradoAinda não há avaliações
- Apostilalrm 2013Documento68 páginasApostilalrm 2013Fabio OkamotoAinda não há avaliações
- Modelagem Da Dinâmica de Sistemas e Estudo Da Resposta PDFDocumento310 páginasModelagem Da Dinâmica de Sistemas e Estudo Da Resposta PDFJose PradoAinda não há avaliações
- Balanceamento de MotoresDocumento54 páginasBalanceamento de MotoresJose Prado100% (4)
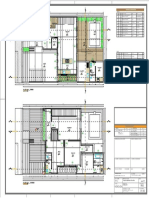
- Projeto Josyvania 01 PDFDocumento1 páginaProjeto Josyvania 01 PDFJoão Pereira de SouzaAinda não há avaliações
- Campo de VetoresDocumento22 páginasCampo de Vetoresluis fontanaAinda não há avaliações
- 7.1 - Nr-13-Comentada Vasos Sob PressãoDocumento169 páginas7.1 - Nr-13-Comentada Vasos Sob PressãoamathiasmecAinda não há avaliações
- Ee0421 Bancada de Combustao Interna de 4 TemposDocumento24 páginasEe0421 Bancada de Combustao Interna de 4 TemposAldair BolzanAinda não há avaliações
- Druidismo PDFDocumento31 páginasDruidismo PDFEdivaldo Visque100% (1)
- Diario de Bordo Expedição Caravelas - Por Michael BertramDocumento61 páginasDiario de Bordo Expedição Caravelas - Por Michael BertramxumakerbnAinda não há avaliações
- Apontamentos - MÁQUINAS DE ELEVAÇÃO DE CARGADocumento53 páginasApontamentos - MÁQUINAS DE ELEVAÇÃO DE CARGAJuvencio SobranoAinda não há avaliações
- 15 Respostas Às Besteiras CriacionistasDocumento10 páginas15 Respostas Às Besteiras CriacionistasRonaldo RibeiroAinda não há avaliações
- VB18Documento8 páginasVB18Shigueo EnamotoAinda não há avaliações
- 4 - Flexão e CisalhamentoDocumento9 páginas4 - Flexão e CisalhamentoAlexandro TikkanenAinda não há avaliações
- Transformações LinearesDocumento3 páginasTransformações LinearesJean CarlosAinda não há avaliações
- LivroDocumento261 páginasLivroWellington José dos SantosAinda não há avaliações
- Engenharia Quimica Versao ADocumento28 páginasEngenharia Quimica Versao AWiltemberg Lima100% (1)
- Eletrodinâmica-Energia e Potencia ElétricaDocumento5 páginasEletrodinâmica-Energia e Potencia ElétricaGilvan PirôpoAinda não há avaliações
- OT-01 - Sistema MRT PDFDocumento146 páginasOT-01 - Sistema MRT PDFMan Man100% (2)
- Relatório ChumbadoresDocumento21 páginasRelatório ChumbadoresLuiz Adolfo de CarvalhoAinda não há avaliações
- 9 26 Proceso de Avaliacao de Um Sistema de Deteccao de Vazamento FinalDocumento5 páginas9 26 Proceso de Avaliacao de Um Sistema de Deteccao de Vazamento FinalHélder PascoalAinda não há avaliações
- Diretriz Sinat N° 011 - PBQPH - d3125Documento42 páginasDiretriz Sinat N° 011 - PBQPH - d3125Consuêlo Siqueira100% (1)
- Montagem e Alinhamento de MáquinasDocumento92 páginasMontagem e Alinhamento de MáquinasJoziel Saxophonist100% (2)
- TCCDocumento28 páginasTCCAndre Luis EstefaneliAinda não há avaliações
- TrigonometriaDocumento2 páginasTrigonometriaVanderlim PinheiroAinda não há avaliações
- C1260 Circuito Do Sensor de Direção HYUNDAIDocumento3 páginasC1260 Circuito Do Sensor de Direção HYUNDAIWELIGTON GOMESAinda não há avaliações
- Pi 7 Ficha PDFDocumento5 páginasPi 7 Ficha PDFElisabete RosaAinda não há avaliações
- Metalurgia Do CobreDocumento39 páginasMetalurgia Do CobreSteven Dzioba50% (2)
- Genograma e Ecomapa PDFDocumento38 páginasGenograma e Ecomapa PDFSendhy QuirinoAinda não há avaliações
- Proposta de Exame FinalDocumento14 páginasProposta de Exame FinalPGAinda não há avaliações
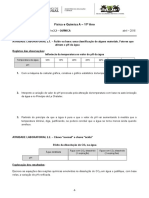
- AL - 2.1, 2.2 e 2.3 Química-2Documento3 páginasAL - 2.1, 2.2 e 2.3 Química-2joao sequeira100% (2)
- 9.º Planificação Anual - 2017-2018Documento4 páginas9.º Planificação Anual - 2017-2018Catarina Fernandes100% (1)
- Problemas - Ensaio de TraçãoDocumento6 páginasProblemas - Ensaio de TraçãoMatheus Paes Peçanha88% (8)
- Clive Cussler - Choque MortalDocumento368 páginasClive Cussler - Choque Mortalc996326Ainda não há avaliações