Você também pode gostar
- CalculoDocumento90 páginasCalculoJorge CamposAinda não há avaliações
- Problemas Por Assunto-19-Ondas SonorasDocumento30 páginasProblemas Por Assunto-19-Ondas SonorasJorge ManhepeAinda não há avaliações
- 2 Exercícios Capítulo1 Campo ElétricoDocumento2 páginas2 Exercícios Capítulo1 Campo ElétricoWesleiFingerAinda não há avaliações
- Exercícios Resolvidos Fisíca I - RotaçãoDocumento9 páginasExercícios Resolvidos Fisíca I - RotaçãoLarissa PAinda não há avaliações
- Tutorial LYXDocumento49 páginasTutorial LYXSandro MagalhãesAinda não há avaliações
- Números ComplexosDocumento4 páginasNúmeros ComplexosAmparo AlmeidaAinda não há avaliações
- Livros de MatematicaDocumento2 páginasLivros de Matematicazanetti181Ainda não há avaliações
- Séries Numéricas - Análise Matemática IIDocumento19 páginasSéries Numéricas - Análise Matemática IIL CAinda não há avaliações
- Equações TrigonométricasDocumento7 páginasEquações TrigonométricasEmily MoonAinda não há avaliações
- Soma e Subtração de Números DecimaisDocumento2 páginasSoma e Subtração de Números DecimaisSofia da GraçaAinda não há avaliações
- Resumão de TrigonometriaDocumento6 páginasResumão de TrigonometriaWILLIAN100% (1)
- Relatório Fisica Movimento UnidimensionalDocumento9 páginasRelatório Fisica Movimento Unidimensionalangelo_jerezchavesAinda não há avaliações
- Cena Do JudeuDocumento16 páginasCena Do JudeuJosé PedroAinda não há avaliações
- Teste 11Documento17 páginasTeste 11Alice CaçãoAinda não há avaliações
- Formulário de RevisõesDocumento4 páginasFormulário de RevisõesTeresa CoimbraAinda não há avaliações
- Exercicio Vibração Livre Nao AmortecidaDocumento9 páginasExercicio Vibração Livre Nao AmortecidaMicelli CamargoAinda não há avaliações
- Lista 1Documento5 páginasLista 1Dajon0% (1)
- Ficha Movimento Vertical Com RarDocumento5 páginasFicha Movimento Vertical Com RarOlivia GomesAinda não há avaliações
- Lista de Exercícios 1 - Questoes e GabaritoDocumento70 páginasLista de Exercícios 1 - Questoes e GabaritoFelipe CarmoAinda não há avaliações
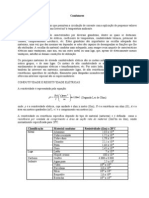
- A Resistência Elétrica de Um Condutor e A TemperaturaDocumento4 páginasA Resistência Elétrica de Um Condutor e A Temperaturaceciliaguise100% (1)
- Ef11 Questoes Preparacao Exame Resolução PDFDocumento27 páginasEf11 Questoes Preparacao Exame Resolução PDFAinsley RapiottAinda não há avaliações
- Ficha - Revisao - 14 Função Quadrática PDFDocumento7 páginasFicha - Revisao - 14 Função Quadrática PDFMarisa FariaAinda não há avaliações
- Relatorio de Fisica - StokesDocumento7 páginasRelatorio de Fisica - StokesTiago LuzAinda não há avaliações
- Aula 6 - Física 2021Documento3 páginasAula 6 - Física 2021Jerónimo LourençoAinda não há avaliações
- SerieDocumento11 páginasSerieDv StvlixAinda não há avaliações
- 10161710102012probabilidade e Estatistica Aula 9Documento31 páginas10161710102012probabilidade e Estatistica Aula 9Igor MacielAinda não há avaliações
- Ciclo de CarnotDocumento4 páginasCiclo de CarnotRui AlmeidaAinda não há avaliações
- Lista Transf. de CalorDocumento3 páginasLista Transf. de CalorGuilherme SixeAinda não há avaliações
- A6. Funcoes HiperbolicasDocumento12 páginasA6. Funcoes HiperbolicasjrvallimAinda não há avaliações
- Exerc Cios CKT em S RieDocumento10 páginasExerc Cios CKT em S RiefrancinaldoAinda não há avaliações
- Algebra LinearDocumento334 páginasAlgebra LinearTiago RosadoAinda não há avaliações
- Apresentação Principio de CavalieriDocumento20 páginasApresentação Principio de CavalieriRudney da MataAinda não há avaliações
- Elasticidade e PlasticidadeDocumento6 páginasElasticidade e Plasticidademeyli80Ainda não há avaliações
- Teste 1 Fisica 12 Ano Novembro 2021 Turma ADocumento3 páginasTeste 1 Fisica 12 Ano Novembro 2021 Turma ADiretor do AgrupamentoAinda não há avaliações
- Leis de NewtonDocumento29 páginasLeis de NewtonFernanda SalesAinda não há avaliações
- FICHAGLOBALDocumento10 páginasFICHAGLOBALSílvia GodinhoAinda não há avaliações
- Lista 2 - Geometria Analítica - Estudo Da RetaDocumento3 páginasLista 2 - Geometria Analítica - Estudo Da RetaJohnny Carlos SilvaAinda não há avaliações
- Superfícies de RevoluçãoDocumento34 páginasSuperfícies de Revoluçãobfo84Ainda não há avaliações
- 5 - Queda Livre e Lançamento VerticalDocumento3 páginas5 - Queda Livre e Lançamento VerticalCarlos Kauan Moreira de SousaAinda não há avaliações
- 27 - Matemática A - 12º Ano - Resolução de Problemas de OtimizaçãoDocumento2 páginas27 - Matemática A - 12º Ano - Resolução de Problemas de OtimizaçãoIolanda SantosAinda não há avaliações
- Exercícios Resolvidos OtimizaçãoDocumento45 páginasExercícios Resolvidos OtimizaçãoJanecleia SousaAinda não há avaliações
- GUIÃO DE CORREÇÃO - Teste 2Documento4 páginasGUIÃO DE CORREÇÃO - Teste 2Carmen PaulinoAinda não há avaliações
- TrigonometriaDocumento27 páginasTrigonometriaSusana FrançaAinda não há avaliações
- Gabarito Ge2 Problemas Fmodist 2008Documento9 páginasGabarito Ge2 Problemas Fmodist 2008LarissaMelônioAinda não há avaliações
- Lista 01 Vetores PDFDocumento4 páginasLista 01 Vetores PDFmspereiraAinda não há avaliações
- Ação de Campos Magnéticos Sobre Cargas em MovimentoDocumento20 páginasAção de Campos Magnéticos Sobre Cargas em MovimentodAinda não há avaliações
- Coordenadas PDFDocumento19 páginasCoordenadas PDFSteven CannonAinda não há avaliações
- Redes Estrela TriânguloDocumento8 páginasRedes Estrela Triânguloelisson1994100% (1)
- Apostila de EDODocumento53 páginasApostila de EDOJulia Nogueira CarraroAinda não há avaliações
- Questões EletricidadeDocumento9 páginasQuestões EletricidadeJohnnyOliveiraPinheiroAinda não há avaliações
- Coeficiente de ViscosidadeDocumento9 páginasCoeficiente de ViscosidadeArmanAinda não há avaliações
- Aula 9 - Derivada Da Função Exponencial e LogarítmicaDocumento4 páginasAula 9 - Derivada Da Função Exponencial e Logarítmicamidocedocinho75% (4)
- 5830 Apostila Leis de NewtonDocumento5 páginas5830 Apostila Leis de NewtonAmanda passosAinda não há avaliações
- Ef11 Em1 PPT Modulo 7Documento13 páginasEf11 Em1 PPT Modulo 7Patrícia ConstantinoAinda não há avaliações
- Aplicação de Ultra-Som em ElétricaDocumento4 páginasAplicação de Ultra-Som em ElétricaSergio PereiraAinda não há avaliações
- Introdução Eletronica - Aula 1Documento39 páginasIntrodução Eletronica - Aula 1Jean BritoAinda não há avaliações
- HTTP://WWW Startecnologia Com Br/PDF/StarferriteseimpedersDocumento8 páginasHTTP://WWW Startecnologia Com Br/PDF/StarferriteseimpedersklausmanfredAinda não há avaliações
- Catalogo Seleniun JBLDocumento55 páginasCatalogo Seleniun JBLMarcio Freitas100% (2)
- Exercícios - Eletromagnetismo IDocumento5 páginasExercícios - Eletromagnetismo IFelipe StefaniAinda não há avaliações
- Manual de Reparações Vectra BDocumento759 páginasManual de Reparações Vectra BRoberto Carlos Muniz100% (5)
- Movimentos - Variações e ConservaçõesDocumento386 páginasMovimentos - Variações e ConservaçõesLizardo H. C. M. Nunes100% (2)
- TrabalhoDocumento18 páginasTrabalhoIthalo MarcelAinda não há avaliações
- IT 01 - Instrucao para Trabalho de Laudo SPDADocumento8 páginasIT 01 - Instrucao para Trabalho de Laudo SPDAPablo AlvesAinda não há avaliações
- Fisica - 12a Classe - 2019-2a EpocaDocumento5 páginasFisica - 12a Classe - 2019-2a EpocaAnildaAinda não há avaliações
- Eletrostática - RevisãoDocumento9 páginasEletrostática - RevisãoMatheus AraújoAinda não há avaliações
- Densidade Do ArDocumento5 páginasDensidade Do ArDGG2010100% (1)
- Resistores Lineares e Não LinearesDocumento18 páginasResistores Lineares e Não LinearesKarla CristinaAinda não há avaliações
- O Que É BTU e Tabela de MedidasDocumento3 páginasO Que É BTU e Tabela de MedidasLuiz MacedoAinda não há avaliações
- Treinamento SkyjackDocumento45 páginasTreinamento SkyjackClaudesson Nascimento Rodrigues100% (1)
- FT 12 - BernoulliDocumento36 páginasFT 12 - BernoulliJennifer SchultzAinda não há avaliações
- Lista Exercicios 1Documento9 páginasLista Exercicios 1Karina PingarilhoAinda não há avaliações
- Atividade de Pesquisa - Sistema Elétrico de Potência Incompleto (Recuperação Automática)Documento7 páginasAtividade de Pesquisa - Sistema Elétrico de Potência Incompleto (Recuperação Automática)kamila SilvaAinda não há avaliações
- Em II 5 Forca Magnetica 2023Documento8 páginasEm II 5 Forca Magnetica 2023abadomAinda não há avaliações
- Aula 1 (Processos Mertalúrgicos - Soldagem)Documento223 páginasAula 1 (Processos Mertalúrgicos - Soldagem)TalwaniAinda não há avaliações
- Materiais Condutores CompletoDocumento23 páginasMateriais Condutores CompletoJoão DanferAinda não há avaliações
- RelLabMod - Radiação TérmicaDocumento40 páginasRelLabMod - Radiação TérmicaRafael BratifichAinda não há avaliações
- Instrumentação Industrial Básica - DesconhecidoDocumento197 páginasInstrumentação Industrial Básica - DesconhecidoRafael Victor GonçalvesAinda não há avaliações
- MRU e MRUVDocumento24 páginasMRU e MRUVestudoeear2023Ainda não há avaliações
- PowerPad 8336Documento2 páginasPowerPad 8336Marcelo LacerdaAinda não há avaliações
- Edc7c32 07 - 2010 PDFDocumento93 páginasEdc7c32 07 - 2010 PDFDiogo Silva Reis100% (1)
- 6 Campo Magnetico CC 2016Documento5 páginas6 Campo Magnetico CC 2016Edmilson Virgilio Jorge MussaAinda não há avaliações
- Curso Sobre Inversor 2Documento60 páginasCurso Sobre Inversor 2leocostaramos100% (1)
- RVC-12 - Controlador Fator Potência PDFDocumento34 páginasRVC-12 - Controlador Fator Potência PDFRafael Ricardo BonaAinda não há avaliações