Você também pode gostar
- Pratica 3Documento2 páginasPratica 3Marcus de PaulaAinda não há avaliações
- 2021 Lab - Cpratica 01CDocumento3 páginas2021 Lab - Cpratica 01Cmessias maiaAinda não há avaliações
- Sistema Eletro HidraulicoDocumento12 páginasSistema Eletro HidraulicodiegoarimateiaAinda não há avaliações
- Relatório - Projeto 1 - Root LocusDocumento27 páginasRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAAinda não há avaliações
- Aprendendo A Usar o Matlab - V3Documento23 páginasAprendendo A Usar o Matlab - V3Daniela Alexandrino0% (1)
- Laplace No MatlabDocumento10 páginasLaplace No MatlabNazareno BragaAinda não há avaliações
- LAB 01 AnáliseSinais - 2024-1 - 03-AbrDocumento6 páginasLAB 01 AnáliseSinais - 2024-1 - 03-AbrAndre AlecsanderAinda não há avaliações
- Métodos Numéricos - Resolução de Sistemas - ExercíciosDocumento28 páginasMétodos Numéricos - Resolução de Sistemas - ExercíciosAlexandre MarcondesAinda não há avaliações
- Trabalho Úncio ÁlgebraDocumento48 páginasTrabalho Úncio ÁlgebraIsabela GodoyAinda não há avaliações
- LAB 03 AnáliseSinais - 2022-1 - 22-JunDocumento6 páginasLAB 03 AnáliseSinais - 2022-1 - 22-JunLeticia de Assis BrazAinda não há avaliações
- Lista1 CG 2018Documento3 páginasLista1 CG 2018KaremMarcominiAinda não há avaliações
- Trab 2 de Topicos Da Matem Aplicada - KaoaneDocumento8 páginasTrab 2 de Topicos Da Matem Aplicada - KaoaneGabriel BragaAinda não há avaliações
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 páginasLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajAinda não há avaliações
- 1 - Laboratório Sistemas Lineares - Estabilidade - ErrosDocumento11 páginas1 - Laboratório Sistemas Lineares - Estabilidade - ErrosMarcela CaixetaAinda não há avaliações
- 3 AvmodelagemDocumento19 páginas3 AvmodelagemAna Luiza CamposAinda não há avaliações
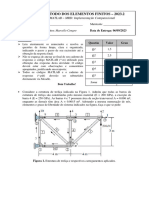
- CIV 2118 - Atividade 1 - 2023Documento2 páginasCIV 2118 - Atividade 1 - 2023M. Cristian Pinto C.Ainda não há avaliações
- Algoritmos e ComplexidadeDocumento20 páginasAlgoritmos e ComplexidadeDuarte NevesAinda não há avaliações
- Algoritmos E Programação Aula 3: Introdução À Algoritmos: Semestre: 02 / 2013 Curso: Engenharia de ProduçãoDocumento44 páginasAlgoritmos E Programação Aula 3: Introdução À Algoritmos: Semestre: 02 / 2013 Curso: Engenharia de ProduçãoDanilo PaulinoAinda não há avaliações
- MODELAGEMDocumento6 páginasMODELAGEMBruna SousaAinda não há avaliações
- MCPF2023-24Teste2 Exemplo FP4 ResDocumento2 páginasMCPF2023-24Teste2 Exemplo FP4 Resbrunonaruto03Ainda não há avaliações
- Lab 4 SCMDocumento11 páginasLab 4 SCMCaetano PellegrinAinda não há avaliações
- Projeto Sinais FinalDocumento34 páginasProjeto Sinais FinalMateus AbdalaAinda não há avaliações
- RltoolDocumento7 páginasRltooladilsondissoAinda não há avaliações
- System Identification - Lab 2Documento2 páginasSystem Identification - Lab 2JoãoEdgarAinda não há avaliações
- Aula 3 - SDCON IIDocumento22 páginasAula 3 - SDCON IILucas LucasAinda não há avaliações
- Aula7 Matlab Tpicos 2 3Documento67 páginasAula7 Matlab Tpicos 2 3silvaAinda não há avaliações
- Aula22 AeP EC2 Lista6 ResultadosDocumento13 páginasAula22 AeP EC2 Lista6 ResultadosPaulo H. CimaAinda não há avaliações
- Programação MatlabDocumento16 páginasProgramação MatlabHalany BritoAinda não há avaliações
- Pratica 13 Robotica IFSPDocumento1 páginaPratica 13 Robotica IFSPMarcus de PaulaAinda não há avaliações
- Guia Modelagem Frequencia 2Documento7 páginasGuia Modelagem Frequencia 2Juscelino RodriguesAinda não há avaliações
- Artigo Controle IIDocumento8 páginasArtigo Controle IISilvio JesusAinda não há avaliações
- Lista 04Documento8 páginasLista 04Paulo GeanfeliceAinda não há avaliações
- Matlab ExerciciosDocumento5 páginasMatlab ExerciciosJhonatan GonçalvesAinda não há avaliações
- Análise de Posição e Velocidade em Um Mecanismo de Quatro BarrasDocumento14 páginasAnálise de Posição e Velocidade em Um Mecanismo de Quatro BarrasDanrleyLimaAinda não há avaliações
- Introdução Ao ScilabDocumento16 páginasIntrodução Ao ScilabJoão Vitor Siviero RochaAinda não há avaliações
- Exercícios Controle e ServomecanismoDocumento5 páginasExercícios Controle e ServomecanismoVictor Hugo FerreiraAinda não há avaliações
- Semana 1 - Noções de ErrosDocumento17 páginasSemana 1 - Noções de ErrosJULIO PEREIRA SILVAAinda não há avaliações
- Ficha Formativa 2Documento6 páginasFicha Formativa 2Marisa Cardoso0% (1)
- Aula 1 - ErrosDocumento13 páginasAula 1 - ErrosSidnei dos Santos BarbosaAinda não há avaliações
- MME-L9 Thiago CordeiroDocumento28 páginasMME-L9 Thiago CordeiroBruna VeigaAinda não há avaliações
- RoteiroDocumento5 páginasRoteiroana.bia.araujo1718Ainda não há avaliações
- Laboratório 1Documento11 páginasLaboratório 1Igor MazzocattoAinda não há avaliações
- Semana 09Documento4 páginasSemana 09Hobbies CristãoAinda não há avaliações
- Controle XCOsDocumento6 páginasControle XCOsDiulie BornAinda não há avaliações
- Comandos Básicos MatLabDocumento6 páginasComandos Básicos MatLabÁthila SantosAinda não há avaliações
- Prova 3 BDocumento7 páginasProva 3 BLucas SenaAinda não há avaliações
- Lista01 ComplexidadeDocumento6 páginasLista01 ComplexidadeVictormatheus SantosAinda não há avaliações
- Modelagem e Análise de Sistemas DinâmicosDocumento113 páginasModelagem e Análise de Sistemas DinâmicosJoel AlvesAinda não há avaliações
- Trabalho Avaliativo (Aplicado À Engenharia de Automação)Documento2 páginasTrabalho Avaliativo (Aplicado À Engenharia de Automação)Fernando PMAinda não há avaliações
- Mapas de KarnaughDocumento10 páginasMapas de KarnaughBruno BastoAinda não há avaliações
- Sistemas de 1 e 2 OrdemDocumento25 páginasSistemas de 1 e 2 OrdemglaucochacalAinda não há avaliações
- Trabalho FinalDocumento13 páginasTrabalho Finaltc12brAinda não há avaliações
- Notas de Aula v3Documento31 páginasNotas de Aula v3Cláudia ZanettiAinda não há avaliações
- 2021-12-07T22 - 21 - 26.151Z - BSBG - A3 - ENG0445N - Controle e Servomecanismos (Trabalho)Documento2 páginas2021-12-07T22 - 21 - 26.151Z - BSBG - A3 - ENG0445N - Controle e Servomecanismos (Trabalho)TwAinda não há avaliações
- Apostila MatlabDocumento100 páginasApostila MatlabRudnei BarbosaAinda não há avaliações
- p1 Controle AulasDocumento135 páginasp1 Controle AulasjoaoreniAinda não há avaliações
- Algoritmos e FluxogramasDocumento28 páginasAlgoritmos e Fluxogramasaksb2869Ainda não há avaliações
- 1 Técnica Transformada Integral Generalizada (GITT)Documento12 páginas1 Técnica Transformada Integral Generalizada (GITT)CroisfeltAinda não há avaliações
- Pratica 8Documento1 páginaPratica 8Marcus de PaulaAinda não há avaliações
- Pratica 9Documento1 páginaPratica 9Marcus de PaulaAinda não há avaliações
- Pratica 1Documento2 páginasPratica 1Marcus de PaulaAinda não há avaliações
- Pratica 1Documento2 páginasPratica 1Marcus de PaulaAinda não há avaliações
- Pratica 7Documento1 páginaPratica 7Marcus de PaulaAinda não há avaliações
- Pratica 1Documento2 páginasPratica 1Marcus de PaulaAinda não há avaliações
- Plano de Aula Sistemas de Controle IIIDocumento3 páginasPlano de Aula Sistemas de Controle IIIMarcus de PaulaAinda não há avaliações
- Plano de Aula DTEI2Documento3 páginasPlano de Aula DTEI2Marcus de PaulaAinda não há avaliações
- Pratica 1Documento2 páginasPratica 1Marcus de PaulaAinda não há avaliações
- Plano de Aula Lab Robotica EngDocumento3 páginasPlano de Aula Lab Robotica EngMarcus de PaulaAinda não há avaliações
- Plano de Aula ServomecanismosDocumento3 páginasPlano de Aula ServomecanismosMarcus de PaulaAinda não há avaliações
- Plano de Aula Controle DigitalDocumento3 páginasPlano de Aula Controle DigitalMarcus de PaulaAinda não há avaliações
- Plano de Aula ModelagemDocumento3 páginasPlano de Aula ModelagemMarcus de PaulaAinda não há avaliações
- Relatório Final - Máquinas Elétricas I - MotorDocumento8 páginasRelatório Final - Máquinas Elétricas I - MotorMarcus de PaulaAinda não há avaliações
- Avaliação Da Conformidade Das Instalações ElétricasDocumento8 páginasAvaliação Da Conformidade Das Instalações Elétricasroberio Alves0% (1)
- Teorias Personalidade IDocumento16 páginasTeorias Personalidade IMarcelo Chiconello0% (1)
- DerivadaDocumento5 páginasDerivadaDouglas JuniorAinda não há avaliações
- MU - 9094 Plus 04-09-17Documento28 páginasMU - 9094 Plus 04-09-17Rogério ToledoAinda não há avaliações
- Cronograma de Aula TICsDocumento6 páginasCronograma de Aula TICsOsmar LemesAinda não há avaliações
- Edital Concurso Cargo Publico Prudentopolis Celetista 2Documento20 páginasEdital Concurso Cargo Publico Prudentopolis Celetista 2Kemelin RodriguesAinda não há avaliações
- Manual MHDX 5208 5216 04-20 SiteDocumento139 páginasManual MHDX 5208 5216 04-20 SiteEmanuel Vinicius de JesusAinda não há avaliações
- Aula 03 - Topologia de RedesDocumento29 páginasAula 03 - Topologia de RedesWeverton MendesAinda não há avaliações
- Manual Do Usuario ITC 4000Documento98 páginasManual Do Usuario ITC 4000Dermeval Ortiz JuniorAinda não há avaliações
- 5 en PTDocumento25 páginas5 en PTKauan KauanAinda não há avaliações
- DistribuiçãoNFe PDFDocumento15 páginasDistribuiçãoNFe PDFrsirallaAinda não há avaliações
- Trabalho Eletronica Circuitos de PotenciaDocumento9 páginasTrabalho Eletronica Circuitos de Potenciaverybad19100% (4)
- Stralis Hi WayDocumento282 páginasStralis Hi WayLeonardo Vieira100% (2)
- Maxxi New MonoDocumento38 páginasMaxxi New MonoAnderson103Ainda não há avaliações
- K-TAG Manual PORTUGUESE PDFDocumento45 páginasK-TAG Manual PORTUGUESE PDFsandro100% (6)
- Manual de Integracao Control RedeDocumento26 páginasManual de Integracao Control RedeAndre FiorotAinda não há avaliações
- Ordem de Serviço ButcellDocumento1 páginaOrdem de Serviço ButcellSergio M. Junior86% (14)
- Manual Instalação Linux Caixa MágicaDocumento55 páginasManual Instalação Linux Caixa Mágicaestima_fcoAinda não há avaliações
- CSI - Configuração e Registro Do Datalogger (Prata)Documento12 páginasCSI - Configuração e Registro Do Datalogger (Prata)Tiago TomazAinda não há avaliações
- GS2001 - Roteador e Sinalizador Audiovisual IP66 97 DBDocumento5 páginasGS2001 - Roteador e Sinalizador Audiovisual IP66 97 DBGustavo Luiz de Souza Lescura100% (1)
- 6 - Nós e Pontos de AncoragemDocumento10 páginas6 - Nós e Pontos de AncoragemysraelboelterAinda não há avaliações
- Fatura - SumicityDocumento2 páginasFatura - SumicityRaquel SouzaAinda não há avaliações
- Cálculo de Vale Transporte - Linha RM - TDNDocumento9 páginasCálculo de Vale Transporte - Linha RM - TDNAnaLuciaCastroAinda não há avaliações
- Manual CancelaDocumento13 páginasManual CancelaValter VasconcelosAinda não há avaliações
- Fazer Teste - QUESTIONÁRIO UNIDADE III - GESTÃO DA ..Documento5 páginasFazer Teste - QUESTIONÁRIO UNIDADE III - GESTÃO DA ..Rnatal RnatalAinda não há avaliações
- Manserv - 47 - 1.1 (Bal UDC 6000-1S)Documento14 páginasManserv - 47 - 1.1 (Bal UDC 6000-1S)Fernando WatambakAinda não há avaliações
- Sistema Cardiorrespiratório Mapa Mental: Fisiopatologia Da Insuficiência CardíacaDocumento2 páginasSistema Cardiorrespiratório Mapa Mental: Fisiopatologia Da Insuficiência CardíacaIsac AquinoAinda não há avaliações
- AI Excel Aula 3Documento11 páginasAI Excel Aula 3Joaotomás55Ainda não há avaliações
- O Que Faz Um Promotor de VendasDocumento4 páginasO Que Faz Um Promotor de VendasEfigênio DiasAinda não há avaliações
- Ementa ENCE Estatistica Aplicada PDFDocumento3 páginasEmenta ENCE Estatistica Aplicada PDFMonica BarrosAinda não há avaliações
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Blockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesNo EverandBlockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesAinda não há avaliações
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Fundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002No EverandFundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002Nota: 5 de 5 estrelas5/5 (8)
- Administração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNo EverandAdministração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNota: 5 de 5 estrelas5/5 (1)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Sua Primeira Startup: O Guia de Negócios Startup, da Ideia ao LançamentoNo EverandSua Primeira Startup: O Guia de Negócios Startup, da Ideia ao LançamentoAinda não há avaliações
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Tudo Sobre A Tecnologia Blockchain: O Guia Mais Completo Para Iniciantes Sobre Carteira Blockchain, Bitcoin, Ethereum, Ripple, DashNo EverandTudo Sobre A Tecnologia Blockchain: O Guia Mais Completo Para Iniciantes Sobre Carteira Blockchain, Bitcoin, Ethereum, Ripple, DashAinda não há avaliações
- Lean Game Development: Desenvolvimento enxuto de jogosNo EverandLean Game Development: Desenvolvimento enxuto de jogosAinda não há avaliações
- Trincas e Fissuras em Edificações: causadas por recalques diferenciaisNo EverandTrincas e Fissuras em Edificações: causadas por recalques diferenciaisAinda não há avaliações
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipNo EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipAinda não há avaliações
- Business Intelligence: Implementar do jeito certo e a custo zeroNo EverandBusiness Intelligence: Implementar do jeito certo e a custo zeroNota: 4.5 de 5 estrelas4.5/5 (4)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Nr-12 - Segurança No Trabalho Em Máquinas E EquipamentosNo EverandNr-12 - Segurança No Trabalho Em Máquinas E EquipamentosAinda não há avaliações
- Gerenciamento da rotina do trabalho do dia-a-diaNo EverandGerenciamento da rotina do trabalho do dia-a-diaNota: 5 de 5 estrelas5/5 (2)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)