Você também pode gostar
- Relatorio Do Estágio de FarmáciaDocumento16 páginasRelatorio Do Estágio de FarmáciacarlosmagjcAinda não há avaliações
- Justiça para Ouriços by Dworkin, RonaldDocumento516 páginasJustiça para Ouriços by Dworkin, RonaldFabio Prado de Freitas100% (12)
- Sequencia Didática de Lingua Portuguesa DescritoresDocumento7 páginasSequencia Didática de Lingua Portuguesa DescritoresAugusto César100% (2)
- 35 - Vetores e Valores PropriosDocumento28 páginas35 - Vetores e Valores PropriosTássio OliveiraAinda não há avaliações
- Valores Vetores PropriosDocumento14 páginasValores Vetores PropriosArturoJLoaizaAinda não há avaliações
- Autovalores e Autovetores Algebra Linear IIDocumento16 páginasAutovalores e Autovetores Algebra Linear IICelso ChipondeAinda não há avaliações
- Autovalores e Autovetores PDFDocumento11 páginasAutovalores e Autovetores PDFfernandoAinda não há avaliações
- Diagonalização PDFDocumento8 páginasDiagonalização PDFAlcides NetoAinda não há avaliações
- Aula 31 - Cálculo 2 PDFDocumento12 páginasAula 31 - Cálculo 2 PDFDayvisonsuitenguAinda não há avaliações
- Autovalores AutovetoresDocumento9 páginasAutovalores AutovetoresRenato Xavier MacedoAinda não há avaliações
- 6 - Valores e Vectores Proprios de Transformacoes LinearesDocumento16 páginas6 - Valores e Vectores Proprios de Transformacoes LinearesThiago RaszejaAinda não há avaliações
- Trabalho G.ADocumento25 páginasTrabalho G.ARayssa AmancioAinda não há avaliações
- Aula 11 Matriz de Uma TransformaçãoDocumento6 páginasAula 11 Matriz de Uma TransformaçãotiagozaoAinda não há avaliações
- Autovetores e Autovalores - Transformação LinearDocumento8 páginasAutovetores e Autovalores - Transformação LinearCurso RaízesAinda não há avaliações
- PF Álgebra Linear 2010.2 (Com Solução)Documento3 páginasPF Álgebra Linear 2010.2 (Com Solução)Sasha SteellAinda não há avaliações
- Exemplos - Autovalores e AutovetoresDocumento3 páginasExemplos - Autovalores e Autovetoreshugonunes89Ainda não há avaliações
- Apostila 05 - Autovalores e Auto Vet OresDocumento3 páginasApostila 05 - Autovalores e Auto Vet Oresmariceliasoares10Ainda não há avaliações
- 08 - Autovalores e AutovetoresDocumento10 páginas08 - Autovalores e AutovetoresMarcelo MottaAinda não há avaliações
- Auto ValoresDocumento25 páginasAuto ValoresIdney CharlisAinda não há avaliações
- Autovalores AutovetoresDocumento9 páginasAutovalores Autovetorescristina lealAinda não há avaliações
- Autovalores, Autovetores e o Teorema de Cayley-HamiltonDocumento2 páginasAutovalores, Autovetores e o Teorema de Cayley-HamiltontharllesAinda não há avaliações
- Gab Ativ6 LinDocumento7 páginasGab Ativ6 LinYasmim BrasilAinda não há avaliações
- Operadores LinearesDocumento12 páginasOperadores LinearesAline de PauliAinda não há avaliações
- Capítulo 6Documento28 páginasCapítulo 6Lucas AraujoAinda não há avaliações
- Autovalores Autovetores e o Teorema de Cayley HamiltonDocumento2 páginasAutovalores Autovetores e o Teorema de Cayley HamiltonRoberto NascimentoAinda não há avaliações
- Autovalores e AutovetoresDocumento11 páginasAutovalores e AutovetoresbrunoperesmoraesAinda não há avaliações
- Diagonalização de OperadoresDocumento4 páginasDiagonalização de OperadoresLuisGianettiAinda não há avaliações
- Unidade 2 - Lista 01 - Álgebra Linear - Transformações LinearesDocumento3 páginasUnidade 2 - Lista 01 - Álgebra Linear - Transformações LinearestiagozaoAinda não há avaliações
- EjemmDocumento8 páginasEjemmDitmar Sayritupac VenturaAinda não há avaliações
- Autovalores e Autovetores É Uma Transformação EspecialDocumento10 páginasAutovalores e Autovetores É Uma Transformação EspecialCamila AmaralAinda não há avaliações
- Algebra Linear (Questoes de Olimpiadas) PDFDocumento18 páginasAlgebra Linear (Questoes de Olimpiadas) PDFMisael Albuquerque LiraAinda não há avaliações
- Transformacoes Lineares PDFDocumento8 páginasTransformacoes Lineares PDFCintia SantosAinda não há avaliações
- Funções Vetoriais e Curvas No Espaço ParametrizaçãoDocumento18 páginasFunções Vetoriais e Curvas No Espaço ParametrizaçãoFlávia SantosAinda não há avaliações
- Complemento Da Apostila de Transformações LinearesDocumento18 páginasComplemento Da Apostila de Transformações LinearesgabrielacaleiaAinda não há avaliações
- Prova 1+2 Linalg 2017-04-03Documento3 páginasProva 1+2 Linalg 2017-04-03julhomaior1Ainda não há avaliações
- Valores e Vetores PropriosDocumento16 páginasValores e Vetores PropriosBruna Duarte100% (1)
- 2 UNIDADE - Transformações LinearesDocumento20 páginas2 UNIDADE - Transformações LinearesMarvin MerlinAinda não há avaliações
- Autovalores AutovetoresDocumento14 páginasAutovalores AutovetoresMaria Gabriele Lemos BarbosaAinda não há avaliações
- Isometrias Do Espaço-TempoDocumento16 páginasIsometrias Do Espaço-TempoWilliam JouseAinda não há avaliações
- Unidade III - Transformações Lineares (BETA)Documento6 páginasUnidade III - Transformações Lineares (BETA)Luana PinheiroAinda não há avaliações
- As I A IV - Algebra Linear IIDocumento24 páginasAs I A IV - Algebra Linear IIViviani Salomão Teixeira SiqueiraAinda não há avaliações
- Lista 10Documento3 páginasLista 10Adrian Carsi PereiraAinda não há avaliações
- Transformações Lineares PDFDocumento5 páginasTransformações Lineares PDFCarllos LimmaAinda não há avaliações
- Algebra LinearDocumento25 páginasAlgebra LinearTalita Cintra BragaAinda não há avaliações
- Diagonalizacao de OperadoresDocumento6 páginasDiagonalizacao de OperadoresDonaldo QuissicoAinda não há avaliações
- Diagonalização de Matriz - Trabalho GALDocumento6 páginasDiagonalização de Matriz - Trabalho GALIsadora OliveiraAinda não há avaliações
- Exercicios Exame-ResolvidosDocumento46 páginasExercicios Exame-ResolvidosGonçalo LimaAinda não há avaliações
- Autovalores e AutovetoresDocumento14 páginasAutovalores e AutovetoresMarcelo BragaAinda não há avaliações
- Algebra Linear Giuliano BoavaDocumento18 páginasAlgebra Linear Giuliano BoavaLeonardo Martins BiancoAinda não há avaliações
- Transformações LinearesDocumento14 páginasTransformações LinearesLucas Santos TrindadeAinda não há avaliações
- Metodo de JordanDocumento23 páginasMetodo de JordanJSO XperiaAinda não há avaliações
- Guia Teórico Prático IIDocumento8 páginasGuia Teórico Prático IIAluno da SilvaAinda não há avaliações
- Algebra IIIIDocumento17 páginasAlgebra IIIImomadesantos49Ainda não há avaliações
- GABARITO - P3-Turmas - Das - 8h - As - 10hDocumento4 páginasGABARITO - P3-Turmas - Das - 8h - As - 10hSkarlleth VelosoAinda não há avaliações
- Álgebra de MatrizesDocumento50 páginasÁlgebra de MatrizesHector Silva de AlvarengaAinda não há avaliações
- MetCaract 2122s1Documento11 páginasMetCaract 2122s1Diogo SilvaAinda não há avaliações
- Álgebra Transformações Lineares Exercícios ResolvidosDocumento11 páginasÁlgebra Transformações Lineares Exercícios ResolvidosAnderson VieiraAinda não há avaliações
- Autovalores e Autovetores - EDODocumento8 páginasAutovalores e Autovetores - EDOJefferson Johannes Roth FilhoAinda não há avaliações
- Lista de Ejercicios 01-ALADocumento2 páginasLista de Ejercicios 01-ALAJamer Insupe Roldan GonzalesAinda não há avaliações
- AL Cap3Documento48 páginasAL Cap3Blaze HellAinda não há avaliações
- Aula 7 - Transformações Lineares-MárciaDocumento24 páginasAula 7 - Transformações Lineares-MárciaRolaAinda não há avaliações
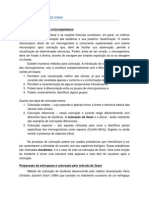
- Prática - Coloração de GramDocumento5 páginasPrática - Coloração de GrambellabiomedicaAinda não há avaliações
- UC02G10UE1 - Guias - FUNDAMENTOS DA TECNOLOGIA MECÂNICADocumento11 páginasUC02G10UE1 - Guias - FUNDAMENTOS DA TECNOLOGIA MECÂNICAPaulo BispoAinda não há avaliações
- Apostila de Avaliacao de Impacto AmbientalDocumento52 páginasApostila de Avaliacao de Impacto AmbientalTarcila Valentim100% (1)
- Pulverizador StaraDocumento134 páginasPulverizador StaraELIASAinda não há avaliações
- Manual Propriet Micro Onibus PDFDocumento94 páginasManual Propriet Micro Onibus PDFJailton SantosAinda não há avaliações
- Constelacao Familiar - Modulo 1Documento11 páginasConstelacao Familiar - Modulo 1DeniseAinda não há avaliações
- Pascoa Jovem 2019 AcordesDocumento6 páginasPascoa Jovem 2019 AcordesJosé Emílio MatosAinda não há avaliações
- Catálogo SEW PDFDocumento879 páginasCatálogo SEW PDFDena Harris82% (11)
- Espelhos - Noturno - Proeja Informática e SuporteDocumento22 páginasEspelhos - Noturno - Proeja Informática e SuporteLuiz AntonioAinda não há avaliações
- Identificação JudiciáriaDocumento18 páginasIdentificação JudiciáriaamdematteAinda não há avaliações
- Sobre Transfundos Ou AncoragensDocumento2 páginasSobre Transfundos Ou AncoragensAdilson MarronAinda não há avaliações
- Caderno Do Acolhedor - 2023 - EF IniciaisDocumento33 páginasCaderno Do Acolhedor - 2023 - EF IniciaiscoordenacaovaledosolAinda não há avaliações
- TarefaI Escolas de InterpretaçãoDocumento6 páginasTarefaI Escolas de InterpretaçãoMonique SchlickmannAinda não há avaliações
- 1 Atividades Complementares Cdi IDocumento3 páginas1 Atividades Complementares Cdi IErnane CarvalhoAinda não há avaliações
- Monografia - Finalissima 17.de - Novembro.2021Documento75 páginasMonografia - Finalissima 17.de - Novembro.2021Júlio Adriano SrmAinda não há avaliações
- Apostila - Elementos de Maquinas III Zaions D.R. (2015)Documento126 páginasApostila - Elementos de Maquinas III Zaions D.R. (2015)Felipe MarquesAinda não há avaliações
- UFCD9876-S6 (2) - Segurança e Proteção IndividualDocumento21 páginasUFCD9876-S6 (2) - Segurança e Proteção Individualcarinalima98Ainda não há avaliações
- 1874 Ki Nox Sensor Hella PTDocumento3 páginas1874 Ki Nox Sensor Hella PTAndre SantosAinda não há avaliações
- AVALIAÇÃO DE FÍSICA - Profº - HenriqueMartins - 100-101-102-103-104Documento5 páginasAVALIAÇÃO DE FÍSICA - Profº - HenriqueMartins - 100-101-102-103-104DhayvesonAinda não há avaliações
- Pud Mec Qualidade Na Constru - o CivilDocumento3 páginasPud Mec Qualidade Na Constru - o CivilJanemary FreireAinda não há avaliações
- A Ideologia Do New AgeDocumento2 páginasA Ideologia Do New AgeJoão Teixeira da SilvaAinda não há avaliações
- B BraunDocumento43 páginasB BraunJosiel MarlosAinda não há avaliações
- Transformação de Coordenadas UTM em Coordenadas GeográficasDocumento20 páginasTransformação de Coordenadas UTM em Coordenadas GeográficasivocamposAinda não há avaliações
- R3 1-1MANUAL SFAVE CELTA 2P e 4P DIA PST BOSCH PDFDocumento2 páginasR3 1-1MANUAL SFAVE CELTA 2P e 4P DIA PST BOSCH PDFLuizao CarlosAinda não há avaliações
- Proteses de Membro SuperiorDocumento20 páginasProteses de Membro SuperiorCristian Ccm MoraesAinda não há avaliações
- Dicas PMP - Matriz GUTDocumento3 páginasDicas PMP - Matriz GUTJenai SousaAinda não há avaliações
- A Doutrina Das Últimas Coisas PDFDocumento4 páginasA Doutrina Das Últimas Coisas PDFEdnelson Vicente da SilvaAinda não há avaliações