Você também pode gostar
- PM3-008 02 20Documento13 páginasPM3-008 02 20Emanuela Amaral100% (1)
- Apostila+CAM+NX10Documento86 páginasApostila+CAM+NX10klebants100% (2)
- Apostila de programação paramétrica CNCDocumento79 páginasApostila de programação paramétrica CNCDiego Goettenz100% (1)
- Curso CNC Introdução Teoria Comando NuméricoDocumento31 páginasCurso CNC Introdução Teoria Comando NuméricoNoriane PadilhaAinda não há avaliações
- Manual HEIDENHAIN ITNC 530Documento15 páginasManual HEIDENHAIN ITNC 530Ademar RamosAinda não há avaliações
- Como um concurseiro conquistou sucesso compartilhando conhecimentoDocumento15 páginasComo um concurseiro conquistou sucesso compartilhando conhecimentoJoni Trader100% (1)
- Aula 1 - Centro de UsinagemDocumento45 páginasAula 1 - Centro de UsinagemRodrigo MartinsAinda não há avaliações
- Engrenagens e soldas notas aulaDocumento21 páginasEngrenagens e soldas notas aulaRobsonstatisticsAinda não há avaliações
- Jeb Blount PT Fanatical-Prospecting Book LifeFeelingDocumento341 páginasJeb Blount PT Fanatical-Prospecting Book LifeFeelingLucas MoreiraAinda não há avaliações
- Catálogo 2019 - Versão Online PDFDocumento199 páginasCatálogo 2019 - Versão Online PDFEric PJAinda não há avaliações
- Introdução ao Controle Numérico e Programação CNCDocumento14 páginasIntrodução ao Controle Numérico e Programação CNCHigino MaininiAinda não há avaliações
- Aula1 - IntroduçãoDocumento30 páginasAula1 - IntroduçãoEmerson JuniorAinda não há avaliações
- Os principais tipos de comando numérico e suas característicasDocumento68 páginasOs principais tipos de comando numérico e suas característicasLeonardo SilvaAinda não há avaliações
- Comando numérico computadorizado (CNCDocumento107 páginasComando numérico computadorizado (CNCAlessandro CarvalhoAinda não há avaliações
- CAM e Programação CNDocumento5 páginasCAM e Programação CNgarbazzaAinda não há avaliações
- Manual de Programação de TornoDocumento41 páginasManual de Programação de TornoAri Ercilio Farias FereirraAinda não há avaliações
- CNC programaçãoDocumento16 páginasCNC programaçãoMatheus AndradeAinda não há avaliações
- Conceitos Basicos de Programação - 16 - 05Documento28 páginasConceitos Basicos de Programação - 16 - 05Marcelo CereserAinda não há avaliações
- Torno CNC - Programação e Operação SENAI SPDocumento119 páginasTorno CNC - Programação e Operação SENAI SPWilliam Marcos Mistrelo100% (1)
- Programação de Máquinas CNC BÁSICODocumento85 páginasProgramação de Máquinas CNC BÁSICORafhael SandersonAinda não há avaliações
- Programacao de Maquinas CNCDocumento84 páginasProgramacao de Maquinas CNCEvandro Lopes da SilvaAinda não há avaliações
- Conem2012 0303Documento8 páginasConem2012 0303jamal resenhaAinda não há avaliações
- Programação CNC 2 EixosDocumento98 páginasProgramação CNC 2 EixosÂngelaCorreiaAinda não há avaliações
- Programação de Usinagem com Edge CAMDocumento99 páginasProgramação de Usinagem com Edge CAMDaniel Fernando BernardoAinda não há avaliações
- 1-Introdução Do CAMDocumento30 páginas1-Introdução Do CAMRogerio SilvaAinda não há avaliações
- Automação Da Usinagem I E Ii Programação de Máquinas CNC: Professor: Eng - Claudinei Santiago SantosDocumento139 páginasAutomação Da Usinagem I E Ii Programação de Máquinas CNC: Professor: Eng - Claudinei Santiago SantosErika Da silvaAinda não há avaliações
- 06 Manual SiemensDocumento106 páginas06 Manual SiemensNaldo Brasiliano100% (3)
- CNC Equipamento e ProgramaçãoDocumento107 páginasCNC Equipamento e ProgramaçãoGuilherme Xavier100% (2)
- CNC ProgramaçãoDocumento229 páginasCNC ProgramaçãoJulianoTorAinda não há avaliações
- ParametrizaçãoDocumento2 páginasParametrizaçãojunior_radaicAinda não há avaliações
- Uma Usinagem Com Um Controle de Qualidade Maior Melhor Acabamento Fabricação em Massa de Baixo Custo Segurança No ProcessoDocumento4 páginasUma Usinagem Com Um Controle de Qualidade Maior Melhor Acabamento Fabricação em Massa de Baixo Custo Segurança No ProcessoFabio GomesAinda não há avaliações
- Cad Cam CNC CappDocumento7 páginasCad Cam CNC CapptedygunawanAinda não há avaliações
- 0 - Cad, Cae, Cam, Capp, Cim, FMSDocumento6 páginas0 - Cad, Cae, Cam, Capp, Cim, FMSsilvio.carvalho.nutriAinda não há avaliações
- Simulação fresamento peça EdgeCAMDocumento33 páginasSimulação fresamento peça EdgeCAMLeandro VialAinda não há avaliações
- Programacao de RobosDocumento18 páginasProgramacao de RobosMarcos AlvesAinda não há avaliações
- Programação Manual de Centro de Usinagem CNCDocumento65 páginasProgramação Manual de Centro de Usinagem CNCMarcio Rodrigo Balmont100% (1)
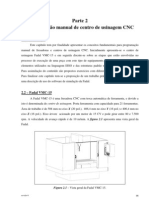
- Parte 2 - CNCDocumento68 páginasParte 2 - CNCHugo Campagnac PereiraAinda não há avaliações
- CNC máquinas e comandosDocumento13 páginasCNC máquinas e comandosLucas AssisAinda não há avaliações
- Controle Numérico Computadorizado CNCDocumento61 páginasControle Numérico Computadorizado CNCMaurício Falcão Teti FilhoAinda não há avaliações
- Trabalho de AutomatosDocumento2 páginasTrabalho de AutomatosBruno RodriguesAinda não há avaliações
- Cat CNC 8037Documento8 páginasCat CNC 8037gabrielsilva2042Ainda não há avaliações
- R94860-1 - Frente - Verso - Branco - Manual de Programação Siemens 810dDocumento92 páginasR94860-1 - Frente - Verso - Branco - Manual de Programação Siemens 810drodrigoAinda não há avaliações
- Torno CNC: principais subsistemas e tiposDocumento90 páginasTorno CNC: principais subsistemas e tiposAngelica AquinoAinda não há avaliações
- Manual de Programacao e Operacao SIEMENSDocumento106 páginasManual de Programacao e Operacao SIEMENSeliseumoraesAinda não há avaliações
- Manual Programação 810DDocumento82 páginasManual Programação 810DRicardo Luiz100% (1)
- 1 - Conceito de Sistema Integrado de ManufaturaDocumento13 páginas1 - Conceito de Sistema Integrado de ManufaturaMário Augusto ArrighiAinda não há avaliações
- Simulador de Programas de Torno CNCDocumento28 páginasSimulador de Programas de Torno CNCAntonio Marcos MarcosAinda não há avaliações
- CNC Manufatura AutomaçãoDocumento34 páginasCNC Manufatura AutomaçãoFelipe PostigoAinda não há avaliações
- Programação CNC Torno e FresaDocumento2 páginasProgramação CNC Torno e FresavrjrAinda não há avaliações
- Modo Repete - PalletDocumento4 páginasModo Repete - PalletAndrei DeonAinda não há avaliações
- Tecnologia CNC funções programáveisDocumento25 páginasTecnologia CNC funções programáveisMatheus Andrade100% (3)
- O Que É CNCDocumento1 páginaO Que É CNCJoãoAinda não há avaliações
- Apostila de Fresa CNCDocumento20 páginasApostila de Fresa CNCFabrício RenanAinda não há avaliações
- Manual TNC 640 - Programação de ciclosDocumento693 páginasManual TNC 640 - Programação de ciclosLeidiane SaraivaAinda não há avaliações
- Monitorando Através Do Visual Basic Dinamômetro Com Esp32 Programado Em ArduinoNo EverandMonitorando Através Do Visual Basic Dinamômetro Com Esp32 Programado Em ArduinoAinda não há avaliações
- Projetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte XlivNo EverandProjetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte XlivAinda não há avaliações
- Jornada Educacional Trader: Provedor de Liquidez (RLP)Documento4 páginasJornada Educacional Trader: Provedor de Liquidez (RLP)Joni TraderAinda não há avaliações
- Nota Fiscal de Serviços com Cartões de VisitaDocumento1 páginaNota Fiscal de Serviços com Cartões de VisitaJoni TraderAinda não há avaliações
- Torneamento - Sinumerik 808d - Proramação e Operação Parte 2Documento232 páginasTorneamento - Sinumerik 808d - Proramação e Operação Parte 2Joni TraderAinda não há avaliações
- Manutencao PreventivaDocumento9 páginasManutencao PreventivaJoni TraderAinda não há avaliações
- Atestado médico 3 dias CID B34.9 Dr Danilo HojoDocumento1 páginaAtestado médico 3 dias CID B34.9 Dr Danilo HojoJoni TraderAinda não há avaliações
- MPDFDocumento1 páginaMPDFJoni TraderAinda não há avaliações
- Chá de Fraudas6a4x4Documento1 páginaChá de Fraudas6a4x4Joni TraderAinda não há avaliações
- PDF Jacksonbezerra Portugues GM Cascavel TeoriaDocumento91 páginasPDF Jacksonbezerra Portugues GM Cascavel TeoriaJoni TraderAinda não há avaliações
- Termux MiniCurso (Aula 1)Documento3 páginasTermux MiniCurso (Aula 1)Joni TraderAinda não há avaliações
- PDF Jacksonbezerra Portugues GM Cascavel TeoriaDocumento91 páginasPDF Jacksonbezerra Portugues GM Cascavel TeoriaJoni TraderAinda não há avaliações
- Decreto #10.630, de 12 de Fevereiro de 2021Documento5 páginasDecreto #10.630, de 12 de Fevereiro de 2021atiradordomatoAinda não há avaliações
- Cartão Intteerraatiivo1Documento1 páginaCartão Intteerraatiivo1Joni TraderAinda não há avaliações
- Masculino e FemininoDocumento1 páginaMasculino e FemininoJoni TraderAinda não há avaliações
- Justiça Eleitoral Tribunal Superior Eleitoral CertidãoDocumento1 páginaJustiça Eleitoral Tribunal Superior Eleitoral CertidãoJoni TraderAinda não há avaliações
- Personalização Termux e Shell Script BásicoDocumento5 páginasPersonalização Termux e Shell Script BásicoJoni TraderAinda não há avaliações
- Certidao Crimes EleitoralDocumento1 páginaCertidao Crimes EleitoralJoni TraderAinda não há avaliações
- Review Instagram 1585527449Documento2 páginasReview Instagram 1585527449Joni TraderAinda não há avaliações
- Relação de contas bancárias para transferência de valoresDocumento66 páginasRelação de contas bancárias para transferência de valoresRoberto Silva reibeAinda não há avaliações
- Diretivas de Privacidade NextDocumento4 páginasDiretivas de Privacidade NextJoni TraderAinda não há avaliações
- Certidao 1404584223042Documento13 páginasCertidao 1404584223042Leonardo SpillerAinda não há avaliações
- Liberação autoral da obra 'Sex With Me (Senta AquiDocumento2 páginasLiberação autoral da obra 'Sex With Me (Senta AquiAlessandro ZoeAinda não há avaliações
- CimbramentoDocumento15 páginasCimbramentoJosé Teodoro Souza Jr100% (1)
- Trade FollowDocumento32 páginasTrade FollowMarcos SouzaAinda não há avaliações
- Perguntas e Respostas Sobre o Cadastro Ambiental Rural (CAR)Documento5 páginasPerguntas e Respostas Sobre o Cadastro Ambiental Rural (CAR)Aedson CardosoAinda não há avaliações
- Ys150sed Usb (1ste) BrasilDocumento59 páginasYs150sed Usb (1ste) BrasilNelson RodrigoAinda não há avaliações
- Simuladores médicos e equipamentos hospitalaresDocumento8 páginasSimuladores médicos e equipamentos hospitalaresEdvar OliveiraAinda não há avaliações
- NJM 2069Documento3 páginasNJM 2069Hélio MandecoAinda não há avaliações
- 3.-Calculo de Losa BidireccionalDocumento5 páginas3.-Calculo de Losa BidireccionalHerlin Luis Challco HuallpaAinda não há avaliações
- Informe - Cadastro - Unico - N - 008 (1) - DocumentaçãoDocumento4 páginasInforme - Cadastro - Unico - N - 008 (1) - DocumentaçãoSecretaria Executiva 2023Ainda não há avaliações
- Checklist Projeto PrefeiruraDocumento2 páginasChecklist Projeto PrefeiruraMonique CandeiaAinda não há avaliações
- Curriculo Jailton Novo 26-08-2022Documento1 páginaCurriculo Jailton Novo 26-08-2022Jailton BarretoAinda não há avaliações
- Aula 3.1 - Bombas - AtualDocumento45 páginasAula 3.1 - Bombas - AtualJoão PauloAinda não há avaliações
- GeoMax Zipp10Pro UM - BRDocumento70 páginasGeoMax Zipp10Pro UM - BRDaniel MelloAinda não há avaliações
- EstoqueSaldo 20230106085934Documento7 páginasEstoqueSaldo 20230106085934gkafcontabilidadeAinda não há avaliações
- Dissertativa Plano EscritaDocumento2 páginasDissertativa Plano EscritaDaiane ReisAinda não há avaliações
- Tema 5 - Project Model Visual (PM Visual)Documento16 páginasTema 5 - Project Model Visual (PM Visual)Jesse FilipeAinda não há avaliações
- 1 - Princípios de Big Data-Combined - CompressedDocumento193 páginas1 - Princípios de Big Data-Combined - CompressedEli De Faria JuniorAinda não há avaliações
- Gestão de pedidos de deliveryDocumento28 páginasGestão de pedidos de deliveryfernandocmbenedetteAinda não há avaliações
- EBook - Tecnologias de Ensino A Distancia - BônusDocumento76 páginasEBook - Tecnologias de Ensino A Distancia - BônusVRTeixeiraAinda não há avaliações
- ENIAC, o primeiro computador eletrônico digitalDocumento4 páginasENIAC, o primeiro computador eletrônico digitalEltonAinda não há avaliações
- Configuração PPPoE em modo BridgeDocumento6 páginasConfiguração PPPoE em modo BridgeFlavio Tonello TavaresAinda não há avaliações
- Processo Seletivo Prefeitura Carmo RJ 2021Documento34 páginasProcesso Seletivo Prefeitura Carmo RJ 2021Terezinha dos Anjos DominguesAinda não há avaliações
- Prova Preambular de Agente de Telecomunicações 2011Documento22 páginasProva Preambular de Agente de Telecomunicações 2011Rosângela Ferreira100% (1)
- Programação de banco de dadosDocumento53 páginasProgramação de banco de dadosAndre SantosAinda não há avaliações
- Quiz GerenciamentoDocumento9 páginasQuiz GerenciamentorafaelajrdsAinda não há avaliações
- Cabine Primaria PDFDocumento2 páginasCabine Primaria PDFAlexandre FernandesAinda não há avaliações
- Rel 15151152Documento190 páginasRel 15151152geovane cardosoAinda não há avaliações