Escolar Documentos
Profissional Documentos
Cultura Documentos
Spinal Manipulative Therapy and Somatosensory Activation - En.pt
Enviado por
Alan KipperTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Spinal Manipulative Therapy and Somatosensory Activation - En.pt
Enviado por
Alan KipperDireitos autorais:
Formatos disponíveis
Traduzido do Inglês para o Português - www.onlinedoctranslator.
com
Acesso público do NIH
Manuscrito do autor
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Publicado na forma final editada como:
Manuscrito do autor do NIH-PA
J Eletromiogr Kinesiol. Outubro de 2012; 22(5): 785–794. doi:10.1016/j.jelekin.2012.01.015.
Terapia manipulativa espinhal e ativação somatossensorial
Joel G Pickar, DC PhD1ePhilip S Bolton, DC PhD2
1Palmer Center for Chiropractic Research, Palmer College of Chiropractic, Davenport, Iowa EUA e
Universidade de Iowa, Departamento de Engenharia Biomédica, Iowa City, IA EUA
2Escolade Ciências Biomédicas e Farmácia, Universidade de Newcastle, Austrália e Centro de
Pesquisa em Saúde Cerebral e Mental do Hunter Medical Research Institute, Austrália
Abstrato
O movimento aplicado manualmente e a mobilização de partes do corpo como atividade de cura têm sido
usados há séculos. Uma força de velocidade relativamente alta e baixa amplitude aplicada à coluna vertebral
com intenção terapêutica, conhecida como terapia manipulativa espinhal (SMT), é uma dessas atividades. É mais
comumente usado por quiropráticos, mas outros profissionais de saúde, incluindo osteopatas e fisioterapeutas,
Manuscrito do autor do NIH-PA
também realizam SMT. Os mecanismos responsáveis pelos efeitos terapêuticos do SMT permanecem obscuros.
As primeiras teorias propuseram que o sistema nervoso medeia os efeitos do SMT. O objetivo deste artigo é
atualizar brevemente nosso conhecimento sobre diversas características físicas de um SMT aplicado e revisar o
que se sabe sobre as características de sinalização dos neurônios sensoriais que inervam a coluna vertebral em
resposta à manipulação espinhal. Com base na literatura experimental, propomos que o SMT pode produzir
uma mudança sustentada na eficácia sináptica dos neurônios centrais, evocando uma descarga explosiva de
alta frequência de vários tipos de neurônios aferentes primários paraespinhais mecanossensíveis e
dinamicamente sensíveis.
INTRODUÇÃO
O movimento aplicado manualmente e a mobilização de partes do corpo como atividade de cura têm
sido usados há séculos (Wiese & Callender, 2005). Uma força de velocidade relativamente alta e baixa
amplitude aplicada à coluna vertebral com intenção terapêutica, conhecida como terapia manipulativa
espinhal (SMT), é uma dessas atividades. É mais comumente usado por quiropráticos, mas outros
profissionais de saúde, incluindo osteopatas e fisioterapeutas, também o utilizam. Embora o SMT tenha
sido defendido para uma ampla gama de problemas de saúde (Ernst & Gilbey, 2010), as melhores
Manuscrito do autor do NIH-PA
evidências disponíveis atualmente sugerem que ele tem um efeito terapêutico em pessoas que sofrem
de algumas formas de dor aguda no pescoço e nas costas, especialmente quando usado em combinação
com outros terapias (Brønfort et al, 2004; Brønfort et al, 2010; Dagenais et al, 2010; Miller et al 2010;
Walker et al 2010; Lau et al 2011). O seu efeito na dor lombar crónica é menos claro (Rubinstein et al
2011; Walker et al 2010).
SMT é normalmente aplicado quando são encontradas áreas disfuncionais da coluna vertebral. Os
médicos identificam essas áreas com base nas alterações palpatórias na textura e no tônus dos tecidos
moles paraespinhais, na capacidade de provocar dor e/ou sensibilidade nesses tecidos,
© 2012 Elsevier Ltd. Todos os direitos reservados.
Isenção de responsabilidade do editor:Este é um arquivo PDF de um manuscrito não editado que foi aceito para publicação. Como um serviço aos nossos clientes,
estamos fornecendo esta versão inicial do manuscrito. O manuscrito passará por edição, composição tipográfica e revisão da prova resultante antes de ser publicado
em sua forma citável final. Observe que durante o processo de produção podem ser descobertos erros que podem afetar o conteúdo, e todas as isenções de
responsabilidade legais que se aplicam à revista são pertinentes.
Conflitos de interesseJG Pickar não tem conflitos de interesse. PS
Bolton não tem conflitos de interesse.
Pickar e Bolton Página 2
assimetrias em pontos de referência de tecidos duros ou moles e restrições no movimento articular da
coluna vertebral (Kuchers & Kappler 2002; Sportelli et al 2005). O objetivo do médico ao aplicar uma
manipulação espinhal é restaurar o movimento normal e normalizar a fisiologia do sistema
Manuscrito do autor do NIH-PA
neuromusculoesquelético em particular e potencialmente de outros sistemas fisiológicos afetados pela
disfunção.
Os mecanismos responsáveis pelos efeitos terapêuticos do SMT permanecem obscuros. As primeiras
teorias propuseram que o sistema nervoso provavelmente medeia os efeitos do SMT. Por exemplo, Korr
(1975) propôs que o SMT altera ou modula a entrada aferente proprioceptiva para o sistema nervoso
central. Doze anos depois, Gillette (1987) forneceu uma descrição especulativa de todas as entradas
aferentes que provavelmente surgiriam do SMT da coluna lombar. O perfil força-tempo do SMT, baseado
no único estudo disponível na época, tinha formato trapezoidal, atingindo um pico de força de quase
200N e durando quase 400ms antes de retornar aos níveis pré-SMT. A identificação de aferentes
provavelmente ativados por SMT foi baseada em uma revisão das evidências experimentais que
descrevem as características de resposta de todos os receptores somáticos mecanossensíveis conhecidos
às características mecânicas dos estímulos que os ativaram (por exemplo, magnitude de força, taxa de
aplicação de força). Muitos dos dados relativos ao tipo de receptor e às características de resposta foram
derivados de estudos envolvendo o sistema somatossensorial apendicular, uma vez que pouco se sabia
na época sobre o sistema somatossensorial axial. Consequentemente, a descrição de Gillette (Gillette,
1987) forneceu um perfil hipotético da atividade aferente que surge durante o SMT.
Manuscrito do autor do NIH-PA
Desde o artigo de referência de Gillette (1987), sabe-se consideravelmente mais sobre a morfologia do
sistema somatossensorial da coluna vertebral (por exemplo, ver Giles & Taylor 1987; Richmond et al 1988;
Groen et al 1990; McLain 1994; Jiang et al 1995; Bolton 1998 ). A Tabela 1 resume os tipos de receptores
que foram encontrados nos tecidos paravertebrais. Da mesma forma, sabe-se agora mais sobre as
características mecânicas do SMT. Além disso, estudos in vivo e cadavéricos nos informaram melhor
sobre a cinemática dos segmentos de movimento vertebral produzidos pelo SMT. Juntos, esses novos
dados fornecem uma base mais informada para modelar a ativação SMT do sistema somatossensorial
axial.
Os objetivos deste artigo são atualizar brevemente nosso conhecimento sobre diversas características
físicas de um SMT aplicado e revisar o que se sabe sobre as características de sinalização dos
neurônios sensoriais que inervam a coluna vertebral em resposta à manipulação espinhal. Então, com
base nesses dados, descrevemos eventos neurofisiológicos que podem contribuir para os efeitos
terapêuticos da manipulação espinhal.
CARACTERÍSTICAS FÍSICAS DO SMT
Parâmetros mecânicos e forças associadas ao SMT
Manuscrito do autor do NIH-PA
As características biomecânicas (ou seja, curvas de força ou deslocamento versus tempo) de uma série de
técnicas de SMT envolvendo protocolos manuais ou assistidos por instrumentos foram determinadas em
estudos realizados diretamente em seres humanos (para revisões, ver Lee et al, 2000; Herzog, 2010) ou com o
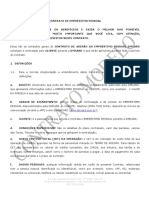
uso de dispositivos de simulação de pacientes (Kawchuk et al 2006; Graham et al, 2010). A Figura 1 mostra
exemplos de ambos os tipos de estudos. Conforme descrito por Herzog (2010), os perfis podem ser
caracterizados por uma fase de pré-carga, uma fase de empuxo que aumenta rapidamente até um pico de
força e uma fase de resolução (ver Fig. 1A).
As características destes perfis parecem variar dependendo da região da coluna vertebral à qual
são aplicados (por exemplo, ver Fig. 1B). Em estudos humanos, os parâmetros cinemáticos do
SMT foram obtidos usando um tapete flexível sensível à força interposto entre as mãos do
médico e do paciente para registrar a força e a duração de um SMT. O SMT na região cervical tem
relativamente pouca pré-carga variando de 0 a 39,5N (Herzog et
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 3
al 1993, Kawchuk et al 1992, Kawchuk & Herzog 1993). Em contraste, as forças médias de pré-carga
durante o SMT na região torácica (139 N ± 46, DP) e na região sacroilíaca (média 88N ± 78N) são
substancialmente maiores do que na região cervical e são potencialmente diferentes umas das outras
Manuscrito do autor do NIH-PA
(Herzog et al, 1993). Do início do impulso ao final da fase de resolução, a duração do SMT varia entre
90-120ms (média = 102 ms). O tempo para atingir o pico de força durante a fase de impulso varia de 30 a
65 ms (média = 48 ms). Os picos de forças aplicadas variam de 99-140 N (média = 118N, n= 6 tratamentos)
(Herzog et al 1993). No mesmo estudo com SMT direcionado à região torácica (T4) e aplicado a três
pacientes diferentes pelo mesmo profissional, o tempo médio (± DP) para o pico de força foi de 150 ms ±
77 ms e o pico médio de força atingiu 399N ± 119N. Durante a fase de resolução, a força retornou aos
níveis pré-SMT durante durações até 2 vezes mais longas do que a fase de impulso. Quando o SMT foi
aplicado à articulação sacroilíaca, as forças médias de pico aplicadas atingiram 328 N ± 78N (Herzog et al
1993), com as fases de impulso e resolução tendo durações semelhantes (~100ms). O pico de força
durante a manipulação da coluna lombar medida por Triano e Schultz (1997) tendeu a ser maior do que
durante a manipulação torácica ou sacroilíaca medida por Herzog et al (1993) e os perfis força-tempo
pareciam ondas semi-senoidais com o o tempo de ida e volta para o pico leva aproximadamente 200 ms.
As forças de impulso de pico durante a manipulação torácica medidas por Suter et al (1994)
aproximaram-se da força de impulso de pico> 400N medida por Triano e Schultz (1997).
As características físicas de um SMT podem variar de acordo com a técnica utilizada e com o praticante
Manuscrito do autor do NIH-PA
individual. Embora o SMT assistido por instrumento possa aplicar forças de pré-carga da ordem de 20N, as
forças de pico variam de aproximadamente 50N a 380N dependendo do instrumento que está sendo usado e da
seleção das configurações do instrumento (Colloca et al 2005). Foi relatado que até 38% dos impulsos assistidos
por instrumentos produzem forças absolutas significativamente diferentes (P<0,05) umas das outras (Kawchuk
et al 2006). Além disso, a diferença na duração da força aplicada entre 2 operadores que utilizam SMT assistida
por instrumento pode chegar a 75% (Kawchuk et al 2006). Da mesma forma, as medições de forças e
deslocamentos do SMT aplicadas a um dispositivo não biológico que simula o local de contato do SMT também
mostram variabilidade. Em um estudo que mediu a força e o deslocamento ao longo da duração de um Toggle
Recoil SMT, tanto a força quanto o deslocamento variaram em 50% quando realizados por um praticante
individual, enquanto, entre os praticantes, a força variou em até 100% e o deslocamento em até 50% (Graham et
al 2010). Essas descobertas presumivelmente identificam a variabilidade relacionada ao profissional, uma vez
que nem os instrumentos nem as propriedades mecânicas do simulador mudam. Durante um procedimento
manipulativo não assistido por instrumentos, predominantemente rotatório, aplicado ao pescoço, os
profissionais não realizaram o procedimento de forma consistente, pois as velocidades de pico de impulso eram
diferentes. No entanto, foi observada uma melhor consistência inter-praticante do que intra-praticante para a
duração do impulso (Ngan et al 2005). Curiosamente, uma técnica manual de mobilização espinhal (baixa
velocidade) (deslizamento lateral cervical) realizada no pescoço demonstrou uma variabilidade intrapraticante
muito pequena (Vicenzino et al, 1999).
Manuscrito do autor do NIH-PA
Está claro que os parâmetros mecânicos do SMT variam significativamente dependendo da
região manipulada da coluna vertebral, do tipo de procedimento realizado e das características
de cada profissional. No entanto, os parâmetros de força são suficientemente descritos para
permitir a modelagem da força aplicada em estudos com animais in vivo (ver seção abaixo
intitulada ESTUDOS DE ATIVAÇÃO AFFERENTE SOMATOSENSORIAL PARAVERTEBRAL DURANTE
MOVIMENTO TIPO SMT).
Movimento Vertebral com SMT
Menos se sabe sobre o movimento vertebral que ocorre durante o SMT. Estudos foram realizados em
cadáveres humanos não embalsamados para determinar o movimento vertebral torácico e lombar
induzido por SMT manual. Movimentos vertebrais absolutos e relativos lineares (em mm) e angulares
(em graus) foram estudados na coluna torácica (Gál et al 1997a, 1997b).
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 4
As acelerações vertebrais caudo-cranianas e póstero-anteriores e as pressões do disco intra-
intervertebral foram estudadas na coluna lombar (Maigne & Guillon, 2000). Embora o número de
indivíduos e conjuntos de dados seja pequeno, esses estudos cadavéricos indicam que a cinemática
Manuscrito do autor do NIH-PA
vertebral após impulsos posteriores a anteriores envolve acelerações e rotações bifásicas e, em alguns
planos, trifásicas (pseudo-oscilatórias). Ianuzzi & Khalsa (2005a; 2005b) usando um atuador para impor
rotações fisiológicas ou cargas simuladas de manipulação espinhal para colunas vertebrais lombares
humanas prosecadas (T12-sacro) investigou o movimento vertebral com 6 graus de liberdade. Eles
demonstraram na região lombar que a translação vertebral ocorre principalmente na direção do impulso
manipulativo e que as rotações vertebrais são relativamente pequenas (<2°). Curiosamente, eles também
descobriram que a tensão na cápsula articular facetária não variava de um lado para o outro ou entre as
cápsulas das vértebras adjacentes à vértebra que recebia o impulso. A partir disso, eles levantaram a
hipótese de que aferentes mecanossensíveis nas cápsulas articulares facetárias, tanto no nível do impulso
aplicado quanto em níveis imediatamente adjacentes, seriam ativados.
Estudos do movimento vertebral associado ao SMT baseado em instrumentos foram realizados em
humanos anestesiados (Keller et al 2003) e ovelhas (Colloca et al 2006; Keller et al 2006a, 2006b). Mais
recentemente, espécimes prosecados de coluna vertebral de suínos foram usados para estudar o
movimento vertebral (aceleração) que ocorre com SMT induzido por instrumento aplicado perpendicular
e oblíquo à área de contato do SMT (Kawchuk & Perle, 2009). Juntos, esses estudos indicam que os
impulsos SMT aplicados por instrumento induzem movimentos vertebrais oscilatórios transitórios (com
Manuscrito do autor do NIH-PA
duração de 100-150 ms), acoplados (eixos múltiplos) que variam dependendo do sujeito sendo testado e
da localização e magnitude da força aplicada. A preparação das ovelhas também demonstra que, como
seria de esperar, a alteração das características força-tempo também altera os deslocamentos e
acelerações tanto da vértebra alvo como das vértebras adjacentes (Colloca et al 2006; Keller et al 2006a,
2006b).
ESTUDOS DE ATIVAÇÃO AFFERENTE SOMATOSENSORIAL
PARAVERTEBRAL DURANTE MOVIMENTO TIPO SMT
Apesar dos desafios éticos e técnicos significativos, Colloca e colegas realizaram registros
eletrofisiológicos da raiz nervosa S1 e do músculo multífido em humanos anestesiados enquanto
aplicavam simultaneamente um SMT baseado em instrumento direcionado de posterior para
anterior na região lombar (Colloca et al, 2000, 2003; Keller et al 2003). Para a raiz nervosa, eles
relataram a ocorrência de atividade elétrica com latência média de início variando de 8,2 a 10,7 ms
após o impulso. Para o músculo multífido, relataram atividade eletromiográfica (EMG) com
latência média de início variando de 5,5 a 18,3 ms. Embora estes estudos indiquem que a
atividade nervosa e muscular pode ser modulada por um impulso manipulativo espinhal, eles
fornecem informações limitadas sobre o tipo de neurônios afetados ou os mecanismos
Manuscrito do autor do NIH-PA
neurofisiológicos envolvidos.
Duas preparações experimentais in vivo bastante diferentes, utilizando o gato anestesiado, foram
desenvolvidas para investigar os efeitos neurofisiológicos dos perfis força-tempo ou deslocamento-
tempo que simulam o SMT quando aplicado à coluna vertebral. Numa preparação, movimentos
angulares definidos podem ser impostos a uma vértebra cervical (Bolton & Holland, 1998). Na segunda
preparação, cargas definidas podem ser aplicadas a uma vértebra lombar sob controle de força ou de
deslocamento (Pickar, 1999).
A primeira preparação foi usada para emular o perfil força-tempo da fase de empuxo de um SMT,
impondo deslocamentos rotacionais do C2vértebra em torno do eixo longitudinal do pescoço (Bolton &
Holland 1998). Deslocamentos trifásicos assimétricos (onda senoidal com onda senoidal amortecida de
2º ½ ciclo) também foram usados para emular o perfil de aceleração e movimentos vertebrais relatados
como ocorrendo durante impulsos de alta velocidade e baixa amplitude em humanos.
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 5
cadáveres (Gal et al, 1997a,b) e durante manipulação espinhal baseada em instrumento (Keller et
al, 2003). Simultaneamente aos deslocamentos rotacionais, foram feitos registros eletrofisiológicos
de aferentes primários de projeção ipsilateral ou contralateral.
Manuscrito do autor do NIH-PA
A segunda preparação utilizando um motor de feedback controlado por computador foi usada pela
primeira vez para emular o perfil força-tempo de manipulações de alta velocidade e baixa amplitude
realizadas por médicos na coluna lombar (Pickar & Wheeler, 2001). As cargas foram aplicadas em L6
processo espinhoso (gatos têm 7 vértebras lombares) e direcionado cranialmente no plano coronal
usando um perfil de força de rampa e retenção (0,3s) representando a fase de pré-carga da manipulação
seguida por um perfil de força aumentando em 100ms até um pico de carga de 100% de o peso corporal
do gato representando a fase de impulso. Simultaneamente, registros eletrofisiológicos foram obtidos de
aferentes primários individuais que inervam o L6tecidos paraespinhais. Em experimentos subsequentes,
cargas manipulativas foram aplicadas ao L6vértebra e direcionado ventralmente no plano transversal
(Sung et al 2005; Pickar & Kang 2006; Pickar et al, 2007). Foram utilizados deslocamentos de pico de 1 e 2
mm e picos de forças proporcionais a 33%, 66% ou 100% do peso corporal do gato. As três forças
induzidas L6deslocamentos de 1,2 (± 0,2), 2,0 (± 0,5) e 3,3 (± 1,1) mm, respectivamente. Esses
deslocamentos são comparáveis aos deslocamentos de translação e rotação (1,5 ± 0,5 mm e 20-3,50,
respectivamente) ocorrendo na coluna lombar de cadáveres humanos quando são realizados impulsos de
alta velocidade e baixa amplitude (Ianuzzi & Khalsa, 2005a).
Manuscrito do autor do NIH-PA
Respostas aferentes do fuso muscular
A atividade de neurônios sensoriais individuais com descarga espontânea em repouso (15-98 impulsos/s)
foi estudada durante a aplicação de cargas semelhantes à manipulação espinhal. (Pickar & Wheeler, 2001;
Pickar & Kang, 2006; Pickar et al, 2007). As gravações foram obtidas do L6radículas dorsais. Os aferentes
foram identificados como originados de fusos musculares localizados nos músculos multífidos ou
longuíssimos lombares com base na localização de seu campo receptivo, em suas respostas à infusão
intra-arterial de succinilcolina e/ou à contração muscular induzida eletricamente. Os aferentes do fuso
foram ainda caracterizados como primários (grupo 1a) ou secundários (grupo II) com base em suas
respostas ao movimento de rampa e retenção do L6vértebra. Esses estudos mostraram que a fase de
impulso da manipulação espinhal aumenta significativamente a taxa de descarga dos fusos musculares
nos músculos paravertebrais lombares profundos (201% ± 57%) em comparação com a fase de pré-carga
(29% ± 20%) (ver Fig. 2A) (Pickar & Wheeler, 2001). A recuperação da taxa de disparo do fuso após a fase
de resolução pode ser imediata ou demorar algum tempo (faixa 100ms - 21,2 s). Além disso, mudar a
direção do empuxo aplicado altera a magnitude da resposta.
Muitas aferências dos fusos musculares na região lombar demonstram um aumento gradual na
frequência instantânea média quando testadas em uma faixa de durações da fase de impulso de 12,5 a
Manuscrito do autor do NIH-PA
400 ms (ver Fig. 2B) (Pickar & Kang 2006). Em geral, os aferentes do grupo Ia parecem mais responsivos
ao impulso manipulativo espinhal do que os aferentes do fuso do grupo II. Alguns aferentes exibem um
aumento apenas em durações específicas de impulso. A taxa de descarga aumenta em 110-520 impulsos/
s durante uma duração de impulso de 100 ms, enquanto só aumenta entre impulsos 28-88 Hz/s durante
uma duração de impulso de 800 ms (Pickar & Kang 2006). O aumento gradual na descarga do fuso à
medida que a duração do impulso diminui (ou seja, à medida que a velocidade da manipulação se torna
mais rápida) não é linear, com uma inflexão ocorrendo em durações de impulso inferiores a 150 ms. Essa
duração representa aquela que os profissionais geralmente alcançam ao aplicar clinicamente uma
manipulação espinhal na região lombar ou cervical (ver seção acima, CARACTERÍSTICAS FÍSICAS DO SMT).
O período de silêncio do fuso após a fase de resolução, que ocorre principalmente nos aferentes do
grupo Ia, torna-se mais curto à medida que a duração da carga de impulso diminui. Os aferentes do fuso
do Grupo II não ficam silenciosos, mas deve-se notar que o seu intervalo de disparo (inverso da taxa de
disparo) é maior que o período de silêncio dos aferentes do Grupo Ia.
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 6
A atividade aferente nos nervos espinhais cervicais (radículas dorsais) foi caracterizada como
decorrente de fusos musculares do pescoço por ser espontânea, sua localização de campo receptivo
estar confinada a um único músculo do pescoço e um aumento em sua taxa de disparo em resposta a
Manuscrito do autor do NIH-PA
um infusão intra-arterial de succinilcolina. No entanto, em contraste com os tecidos aferentes que
inervam a região lombar, os aferentes que inervam o pescoço são demasiado curtos no gato para
permitir uma classificação precisa como Grupo I, II, III ou IV com base na velocidade de condução. No
entanto, foi possível estudar a suposta atividade do fuso muscular na coluna cervical. Como pode ser
visto na Figura 3, o deslocamento do C2vértebra pode induzir uma diminuição (Fig 3A) ou aumento (Fig
3B) no disparo espontâneo de aferentes do fuso muscular do pescoço, dependendo da direção do
deslocamento. A Figura 3 também mostra que C2o deslocamento pode induzir uma pausa inicial e
depois um aumento (Fig. 3C) ou um aumento inicial seguido por uma diminuição (Fig. 3D) na descarga
espontânea. Em cada caso, a taxa de disparo espontâneo do fuso retorna rapidamente ao nível do
deslocamento vertebral do tipo pré-manipulativo.
Respostas aferentes do órgão tendinoso de Golgi
Considerava-se que aferentes com campos receptivos nos tecidos paravertebrais lombares do gato surgiam
dos órgãos tendinosos de Golgi (GTO) se 1) não exibissem atividade espontânea, mas 2) respondessem a
cargas com atividade de curta duração e baixa frequência, 3) apresentavam taxas de descarga irregulares em
resposta a uma injeção intra-arterial de succinilcolina e, 4) apresentavam velocidades de condução na faixa do
grupo I (Pickar & Wheeler, 2001). Esses aferentes exibiram respostas à carga semelhante ao SMT bastante
Manuscrito do autor do NIH-PA
diferente daquela dos fusos musculares. Em particular, os aferentes do GTO raramente eram ativados pela
fase de pré-carga (com aumentos na taxa de disparo em
> 10 Hz ocorrendo em apenas 3 das 15 ocasiões) e foram levemente ativados pela fase de impulso, aumentando
sua frequência de disparo em apenas 21± 4 impulsos/s durante a fase de impulso em relação ao controle e em
apenas 19 ± 4 impulsos/s em relação ao a fase de pré-carga. Também em contraste com os aferentes do fuso
muscular, os GTOs responderam mesmo quando a direção do SMT foi alterada (cranial, caudal ou 450ao longo
eixo da coluna). Com poucas exceções, os aferentes do GTO silenciaram imediatamente após a fase de impulso e
permaneceram silenciosos. Em um segundo estudo usando uma carga tipo manipulação de 33% do peso
corporal (Sung et al 2005), um suposto aferente do GTO mostrou um padrão de comportamento semelhante aos
aferentes do fuso muscular quando testado em uma faixa de durações de impulso, mas seu disparo instantâneo
médio a taxa durante a fase de impulso foi substancialmente menor do que a dos aferentes do fuso.
Aferentes putativos dos corpúsculos de Pacini
Pickar & Wheeler (2001) relataram a resposta de um aferente que estava inativo em repouso e
rapidamente adaptado quando os tecidos paraespinhais lombares foram sondados. Ele respondeu a
um impulso semelhante ao SMT (duração: 200ms; força de pico: 6,4N) que distraiu a articulação
Manuscrito do autor do NIH-PA
facetária, mas não respondeu a taxas de carga ~10 vezes mais lentas que a taxa de empuxo, nem a
cargas de pico que eram até 4 vezes maiores. do que a força de impulso máxima. Se esse aferente
pertencesse a um GTO, provavelmente teria sido ativado pelo aumento da carga (Stuart et al, 1970). Por
responder à taxa de carga mecânica, era provavelmente um corpúsculo de Pacinicano (Sato, 1961).
Outros Aferentes
Os aferentes dos tecidos paravertebrais cervicais são difíceis de caracterizar com precisão porque
não podem ser identificados com base na sua velocidade de condução e os seus campos
receptivos são difíceis de isolar devido aos extensos movimentos acoplados da vértebra cervical
quando forças mecânicas são aplicadas para determinar os limiares mecânicos. . Por exemplo,
Bolton e Holland (1996) notaram que uma resposta aferente a uma grande força mecânica pode
não representar de fato um mecanorreceptor de alto limiar, como um GTO localizado no local da
força aplicada, mas representar um mecanorreceptor de baixo limiar situado distantemente e
respondendo à força mecânica amortecida. Também tem sido difícil
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 7
classificar aferentes que respondem ao movimento do C2vértebra, mas não têm atividade
espontânea e não respondem à injeção intra-arterial de succinilcolina (Bolton & Holland, 1996).
Neste estudo, alguns (2/8) aferentes tinham campos receptivos nos músculos semiespinal cervical
Manuscrito do autor do NIH-PA
ou semiespinal dorsal ipsilateral e foram ativados durante os movimentos do C2
vértebra que alongava esses músculos, mas não quando eles eram encurtados. As respostas foram se
adaptando rapidamente, mostrando uma explosão de 3-5 pontas, sugerindo que eram aferentes dos
órgãos tendinosos de Golgi ou dos corpúsculos paciniformes. No entanto, isso não pôde ser
confirmado. Curiosamente, setenta e cinco por cento dos aferentes (6/8) só foram ativados por
pinçamento firme (nocivo) do C ipsilateral.2-3cápsula articular zigapofisária com metade (3/6)
demonstrando pós-descarga, sugerindo que transmitiam informações nociceptivas.
Características comuns
Fica claro a partir desses estudos nas regiões lombar e cervical que cargas de impulso com perfis
de tempo de força semelhantes aos de impulsos manuais de alta velocidade e baixa amplitude
evocam uma descarga de frequência relativamente alta de fusos musculares aferentes que
inervam, GTOs e mecanorreceptores de alto limiar. Atualmente não há dados inequívocos sobre se
o SMT ativa os nociceptores.
CONSEQUÊNCIAS NEUROFISIOLÓGICAS DO SMT QUE PODEM SUBJATAR OS
EFEITOS DO SMT
Manuscrito do autor do NIH-PA
As descobertas biomecânicas revisadas acima indicam que a natureza do impulso SMT é um evento
mecânico dinâmico. Durante a manipulação, os deslocamentos e forças do tecido mudam rapidamente,
sem nenhum componente estático e duram apenas um curto intervalo de tempo. Como poderia este
estímulo mecânico dinâmico e de muito curta duração (<150ms) mudar o comportamento do sistema
nervoso de uma forma que durasse mais que a própria intervenção? Os achados neurofisiológicos
revisados acima oferecem uma oportunidade para considerar um mecanismo contributivo. Foi sugerido
que a influência duradoura de uma manipulação no sistema nervoso pode ser considerada como um
evento primário e/ou secundário (por exemplo, Pickar, 2002; Leach, 2004; Henderson, 2005; Bialsoky,
2009a). Por primário nos referimos a qualquer resposta neural de longa duração que surge como
consequência direta da atividade neural de curta duração que ocorre durante a manipulação. Por
secundário nos referimos a uma resposta neural duradoura que surge como consequência de (isto é,
secundária a) uma mudança duradoura na biomecânica espinhal causada pela manipulação.
Biomecânica Espinhal
Supõe-se que uma série de mudanças sustentadas na biomecânica da coluna ocorram como resultado do SMT.
Por exemplo, o impulso impulsivo pode alterar a biomecânica segmentar, liberando meniscoides presos,
Manuscrito do autor do NIH-PA
liberando aderências ou diminuindo a distorção no disco intervertebral (Farfan, 1980; Giles 1989; Lewit, 1991;
Haldeman, 1978; Vernon, 1997). Além disso, acredita-se que segmentos de movimento individuais sejam capazes
de deformar, produzindo assim movimentos vertebrais relativamente grandes que alcançam uma nova posição
de equilíbrio estável (Wilder et al., 1988). O impulso manipulativo pode fornecer energia suficiente para restaurar
um segmento empenado para um nível de energia mais baixo, reduzindo assim o estresse mecânico ou a tensão
nos tecidos espinhais moles e duros (Triano, 2001).
As respostas neurais que surgem secundárias às alterações biomecânicas de longa duração podem ser
amplamente conceituadas como resultantes de alterações neurofisiológicas que ocorrem nas
terminações receptivas dos aferentes primários e/ou ao longo das vias de transmissão dessas
terminações receptivas. Aferentes primários mecanicamente sensíveis com terminações receptivas
embutidas em tecidos paraespinhais profundos respondem a tensões e tensões mecânicas em seu
ambiente local (Ianuzzi & Khalsa, 2005a). Mudanças duradouras em sua mecânica
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 8
ambiente poderia modificar a informação mecanossensorial recebida pela medula espinhal e pelo
cérebro. Os sinais dos quimiorreceptores também podem ser alterados na medida em que as condições
inflamatórias são alteradas pela manipulação (por exemplo, ver Song et al, 2006). As vias de
Manuscrito do autor do NIH-PA
transmissão, por outro lado, incluem nervos periféricos e gânglios, onde passam ou ficam no forame
intervertebral, e a medula espinhal e o tronco cerebral, onde este último se estende através do forame
magno até o canal neural. A força compressiva sustentada no tecido neural nesses locais pode afetar
tanto a atividade baseada em impulso (frequência do potencial de ação) quanto a atividade não baseada
em impulso (transporte axoplasmático) (ver Korr, 1978). Foi levantada a hipótese de que a manipulação
espinhal pode aliviar a compressão mecânica nessas vias de transmissão e induzir mudanças benéficas
no meio químico desses neurônios (ver Leach, 2004; Henderson, 2005 para uma discussão mais
aprofundada deste tópico).
Ativação de Receptores Somatosensoriais
Em 1987, Gillette (Gillette, 1987) propôs que a manipulação espinhal ativa todos os receptores
somatossensoriais mecanossensíveis conhecidos porque todos eles possuem limiares mecânicos
inferiores ao pico de força fornecido durante uma manipulação e porque os 40 tipos de receptores in toto
respondem a estímulos dinâmicos e/ ou componentes estáticos de um estímulo mecânico. A justificativa
foi baseada no perfil de tempo de carga para uma manipulação espinhal que havia sido registrada
naquele momento (ver Gillette, 1987). Dados biomecânicos mais recentes (ver seção acima,
CARACTERÍSTICAS FÍSICAS DO SMT) indicam que é necessária uma revisão deste perfil de tempo de carga.
Uma manipulação espinhal de alta velocidade e baixa amplitude, que mais de 90% dos pacientes
Manuscrito do autor do NIH-PA
quiropráticos recebem como parte de seus cuidados (Christensen, 2005), é puramente dinâmica, com um
curto tempo de subida até seu pico de amplitude e sem nenhum componente estático ( veja a Figura 1).
Com base nestas características, a população de receptores proposta que responde a uma manipulação
espinhal pode ser reduzida em mais da metade, apenas para aqueles que possuem um componente
dinâmico substancial. Os limiares desses aferentes são inferiores a 20-30N (ver Tabela 2 de Gillette, 1987)
e representam magnitudes menores que o pico de força de uma manipulação. Assim, seria esperado que
todas as quatro classes de neurônios aferentes primários, [fibras do Grupo Ia, Ib e II (Aβ), III (Aδ) IV (C)]
respondessem durante a manipulação. Contudo, os tecidos vertebrais poderiam atuar como filtros
mecânicos passa-baixo, reduzindo o componente dinâmico do estímulo. No extremo, a carga aplicada
pode dissipar-se e a sua magnitude tornar-se insuficiente para activar estes receptores sensoriais. No
entanto, registros de atividade multi-unitária e unitária em aferentes primários paraespinhais mostram
que a manipulação espinhal de fato estimula aferentes paraespinhais (ver seção acima, ESTUDOS DE
ATIVAÇÃO AFFERENTE SOMATOSENSORIAL PARAVERTEBRAL DURANTE MOVIMENTO TIPO SMT).
Até o momento, apenas os aferentes do fuso muscular na região lombar foram sistematicamente estudados e
sua resposta à manipulação espinhal foi caracterizada (ver seção acima,Respostas aferentes do fuso muscular
). Seu comportamento não linear em resposta à duração da fase de impulso da manipulação pode não ser
Manuscrito do autor do NIH-PA
considerado surpreendente com base na conhecida sensibilidade à velocidade dos fusos estudados nos
músculos dos membros. Assim como os aferentes dos fusos musculares dos membros (por exemplo, ver Figura
10 em Matthews 1963), as terminações paravertebrais do fuso do Grupo Ia mostram uma inflexão de resposta.
Esta inflexão representa um limiar para frequências de descarga do fuso mais altas do que seriam de outra
forma previstas a partir das suas frequências de descarga evocadas por taxas de estiramento mais lentas. O
mais interessante é que esta taxa limite de alongamento (~10 mm/s) é comparável à taxa na qual uma
manipulação espinhal transmite movimento a uma vértebra, traduzindo-a menos de 3 mm em menos de 150
ms (veja acimaMovimento Vertebral com SMT).
Os fusos musculares também demonstram outro tipo de limiar dinâmico quando sua sensibilidade foi estudada
usando ciclos de alongamento-encurtamento sinusoidal. Nos membros, tanto os aferentes do fuso muscular do
Grupo Ia como do Grupo II mostram um aumento não linear na sensibilidade em taxas de carga sinusoidal de
1,5 ciclos/s (por exemplo, ver Figura 5 em Matthews & Stein 1969). Pode ser visto em
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 9
Figura 2B que quando uma manipulação espinhal é modelada como uma onda semi-senoidal, o impulso
manipulativo representa um quarto de ciclo. Uma duração de impulso de 150 ms representaria uma taxa de
carregamento de 6,7 ciclos/s e seria mais rápida que o limite de taxa sinusoidal para maior sensibilidade do fuso.
Manuscrito do autor do NIH-PA
Juntas, essas descobertas sugerem que uma consequência de uma manipulação espinhal é que ela cria uma
entrada sensorial de frequência mais alta a partir dos fusos musculares do que ocorre durante o movimento
diário da coluna. A barragem sensorial da população seria relativamente sincronizada no tempo, ocorrendo
durante o intervalo de tempo do impulso (<150ms) e do movimento vertebral que o acompanha. As informações
sensoriais provavelmente chegariam ao sistema nervoso central a partir de uma área relativamente localizada da
coluna vertebral (veracima,Movimento Vertebral com SMT) .
Em comparação com os fusos musculares, a relação entre a velocidade de um estímulo mecânico aplicado e o
padrão de descarga de aferentes mecanossensíveis e não fusiformes na coluna vertebral ou nos membros é
virtualmente desconhecida. Por exemplo no dedo, Edin et al. (1995) mostraram que as taxas de descarga de
mecanorreceptores cutâneos do Grupo II, dinamicamente sensíveis, aumentaram à medida que a velocidade de
indentação da pele aumentava. A relação formal entre os dois não foi caracterizada. Da mesma forma, sabe-se
que os mecanonociceptores de fibra A-δ e C são conhecidos por disparar uma rajada inicial alta durante uma
aplicação de estímulo mecânico dinâmico (Mense, 1986; White & Levine, 1991), mas como a duração de sua
frequência de descarga está formalmente relacionada com o a magnitude ou velocidade do estímulo não é
conhecida. Se os aferentes paraespinhais não fusiformes também são ativados por uma manipulação espinhal
(ver acima, Outros Aferentes), parece razoável pensar que eles também apresentam uma explosão de atividade
Manuscrito do autor do NIH-PA
de alta frequência para o sistema nervoso central de maneira sincronizada e de uma área localizada de a coluna.
O conhecimento de que movimentos semelhantes aos do SMT produzem uma barragem de potenciais de ação
de curta duração e alta frequência (ver acima) levanta a possibilidade de que o SMT possa induzir efeitos de
longo prazo, modulando o sistema nervoso central. Quase 3 décadas atrás, estudos mostraram que a eficácia
sináptica é afetada pela história de explosão de alta frequência dos aferentes musculares do grupo Ia e do grupo
II (Davis et al, 1985, Luscher et al., 1983; Collins et al., 1984). O efeito durou além da duração da explosão em si.
Nos motoneurônios α, explosões de potenciais de ação com intervalos curtos entre picos afetaram a magnitude
dos potenciais pós-sinápticos de maneira diferente de intervalos entre picos mais longos. Além disso, os
motoneurônios α são biestáveis e podem sustentar potenciais de platô. Breves períodos de excitação podem
transformá-los em um período de disparo autossustentado (Hounsgaard et al, 1986). Tal estado parece ter
consequências para a produção normal de força muscular (Collins et al, 2002). Tais processos podem estar
subjacentes aos achados experimentais que mostram mudanças nos parâmetros relacionados ao aumento da
excitabilidade muscular após o SMT (Suter et al, 2000; Dishman et al, 2002; Keller e Colloca, 2000; Koppenahaven
et al, 2011).
Manuscrito do autor do NIH-PA
A estimulação de alta frequência de fibras A-δ e C de pequeno diâmetro também afeta a eficácia
sináptica. Tanto a potenciação a longo prazo como a depressão foram produzidas (Randic et al., 1993). A
mudança no comportamento dos neurônios de segunda ordem dura até 1 hora após a barragem
sensorial inicial (Randic et al., 1993, Ikeda et al, 2000). Nestas experiências, um nervo periférico foi
estimulado electricamente, activando assim de forma síncrona a população aferente. Todo o nervo foi
estimulado a 100 Hz durante um intervalo de curta duração (~1s) e foi administrado várias vezes em
intervalos de ~10s. A relevância fisiológica de tal estímulo tem sido questionada porque as fibras C- e
talvez A-δ normalmente não descarregam em taxas tão altas, mas a estimulação usando frequências
mais intermediárias (20 Hz) também produz mudanças duradouras (3-6 horas) na eficácia sináptica (Liu &
Sandkühler, 1997). As durações dos estímulos são claramente mais longas do que um estímulo
manipulativo (<150ms); no entanto, atualmente não temos conhecimento sobre quão curta uma duração
é capaz de provocar uma mudança na eficácia sináptica. Além disso, não se sabe quais taxas de descarga
são evocadas em C- e A- paraespinhais.
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 10
δfibras por manipulação espinhal. Embora as mudanças na eficácia sináptica produzidas por paradigmas de
estimulação de alta frequência tenham sido aplicadas para a compreensão dos mecanismos celulares
subjacentes à hiperalgesia (Sandkuhler, 2009), elas também fornecem uma base razoável para considerar
Manuscrito do autor do NIH-PA
como a entrada mecânica dinâmica e de curta duração de uma manipulação espinhal produz um efeito
neural. resposta que sobreviva à própria intervenção. Este processo neurofisiológico pode estar subjacente
às descobertas de estudos científicos básicos de orientação clínica, mostrando que a manipulação espinhal
reduz a soma temporal dos estímulos térmicos entregues à periferia (George et al, 2006; Bialosky et al,
2009b; Bishop et al. 2011).
Conclusões
Em conclusão, a manipulação espinhal pode afetar o sistema nervoso, ativando neurônios sensoriais
paraespinhais durante a própria manobra e/ou alterando a biomecânica espinhal. As mudanças biomecânicas
que seguem a manipulação modulariam, por sua vez, os sinais dos neurônios sensoriais paravertebrais. Como
um estímulo mecânico dinâmico e de curta duração, a manipulação espinhal pode tirar vantagem de duas
características de sinalização do sistema nervoso: 1) propriedades inerentes de sinalização de alta frequência de
neurônios aferentes primários dinamicamente sensíveis e 2) propriedades de resposta de neurônios pós-
sinápticos. Estudos experimentais revelam que a manipulação espinhal evoca uma descarga de alta frequência
em alguns aferentes primários. Em estudos experimentais que não utilizam manipulação espinhal, a soma
espacial e/ou temporal de entradas de alta frequência produz mudanças sustentadas na eficácia sináptica.
Estudos futuros direcionados à compreensão de como os neurônios centrais são afetados pela entrada
sensorial de alta frequência dos tecidos paraespinhais durante a manipulação são garantidos com base na
Manuscrito do autor do NIH-PA
literatura e devem contribuir para a nossa compreensão dos mecanismos de ação da manipulação espinhal.
Agradecimentos
A pesquisa de JG Pickar é apoiada por doações do Centro Nacional de Medicina Complementar e Alternativa (NCCAM).
Algumas investigações foram conduzidas em uma instalação construída com o apoio da Bolsa de Melhoria de Instalações
de Pesquisa Número C06 RR15433 do Centro Nacional de Recursos de Pesquisa, Instituto Nacional de Saúde.
A pesquisa de PS Bolton é apoiada por doações do Conselho Nacional de Saúde e Pesquisa Médica da Austrália e da
Australian Spinal Research Foundation.
BIOSKETCH
Joel G. Pickar é professor do Palmer Center for Chiropractic Research do Palmer College of
Chiropractic em Davenport, IA. Ele obteve seu Doutorado em Quiropraxia pelo Palmer College of
Chiropractic em 1977 e seu PhD em fisiologia pela Universidade da Califórnia Davis em 1990. Seu
Manuscrito do autor do NIH-PA
laboratório de pesquisa estuda questões neurofisiológicas relacionadas à coluna vertebral e à
manipulação quiroprática.
Philip S. Bolton recebeu um bacharelado (Fisiologia) pela University of New England
(Austrália) em 1976, seu doutorado em Quiropraxia (DC) pelo Palmer College of
Chiropractic (EUA) em 1980 e seu doutorado em Neurociência pela University of New
Gales do Sul (Austrália) em 1990. Concluiu pós-doutorado na Rockefeller University
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 11
(EUA), e foi cientista visitante na Universidade de Pittsburgh (EUA), no Instituto de Pesquisa
Médica Prince of Wales (Austrália) e na Universidade de Sydney (Austrália). Ele é pesquisador
sênior do Grupo de Pesquisa em Dor e Disfunção Sensorial do Centro de Pesquisa Prioritária
Manuscrito do autor do NIH-PA
para Neurociência Translacional e Saúde Mental da Universidade de Newcastle.
Referências
Amonoo-Kuofi HS. A densidade dos fusos musculares nas colunas medial, intermediária e lateral do
músculos pós-vertebrais intrínsecos humanos. Jornal de Anatomia. 1983; 136(3):509–19. [PubMed:
6224767]
Bialosky JE, Bishop MD, Price DD, Robinson ME, George SZ. Os mecanismos da terapia manual em
o tratamento da dor musculoesquelética: um modelo abrangente. Terapia manual. 2009; 14:531–38.
[PubMed: 19027342]
Bialosky JE, Bishop MD, Robinson ME, Zeppieri G Jr. A terapia manipulativa espinhal tem um
Manuscrito do autor do NIH-PA
efeito imediato na sensibilidade à dor térmica em pessoas com dor lombar: um ensaio clínico
randomizado. Fisioterapia. 2009; 89:1292–1303. [PubMed: 19797305]
Bispo MD, Beneciuk JM, George SZ. Redução imediata na soma sensorial temporal após
manipulação da coluna torácica. O Jornal da Espinha. 2011; 11:440–46. [PubMed: 21463970]
BoltonPS. O sistema somatossensorial do pescoço e seus efeitos no sistema nervoso central.
Jornal de Fisiologia e Terapêutica Manipulativa. 1998; 21(8):553–63.
Bolton PS, Holanda CT. Sinalização aferente de deslocamento vertebral no pescoço do gato. Sociedade
para Neurociências, Resumos. 1996; 22:1802.
Bolton PS, Holanda CT. Um método in vivo para estudar a atividade das fibras aferentes do colo do útero
tecido paravertebral durante o movimento vertebral em gatos anestesiados. Jornal de Métodos de Neurociências.
1998; 85:211–8. [PubMed: 9874157]
Boyd-Clark LC, Briggs CA, Galea MP. Distribuição, morfologia e densidade do fuso muscular em longus
músculos colli e multífidos da coluna cervical. Coluna. 2002; 27:694–701. [PubMed: 11923661]
Bronfort G, Haas M, Evans R, Bouter LM. Eficácia da manipulação e mobilização da coluna vertebral para baixa
dor nas costas e dor no pescoço: uma revisão sistemática e melhor síntese de evidências. O Jornal da Espinha. 2004;
4:335–56. [PubMed: 15125860]
Brønfort G, Haas M, Evans R, Leininger B, Triano J. Eficácia das terapias manuais: o Reino Unido
relatório de provas. Quiropraxia e Osteopatia. 2010; 18:3, 1–33. (doi:10.1186/1746-1340-18-3).
Manuscrito do autor do NIH-PA
[PubMed: 20184717]
Cao DY, Pickar JG, Ge W, Ianuzzi A, Khalsa PS. Sensibilidade de posição do músculo paraespinhal felino
fusos ao movimento vertebral na coluna lombar. Jornal de Neurofisiologia. 2009; 101(4):
1722–9. [PubMed: 19164108]
Christensen, MG.; Kerkhoff, D.; Kollasch, MW.; Cohn, L. Análise de Trabalho de Quiropraxia. Nacional
Conselho de Examinadores de Quiropraxia; CO: 2005.
Collins WF III. Honig MG, Mendell LM. Heterogeneidade das sinapses do grupo Ia em alfa-homônimos
motoneurônios conforme revelado pela estimulação de alta frequência das fibras aferentes Ia. Jornal
de Neurofisiologia. 1984; 52(5):980–93.
Collins DF, Burke D, Gandevia SC. Contrações sustentadas produzidas por comportamento tipo platô em
motoneurônios humanos. Jornal de Fisiologia. 2002; 538:289–301. [PubMed: 11773336]
Colloca CJ, Keller TS, Black P, Normand MC, Harrison DE, Harrison DD. Comparação de mecânica
força de instrumentos de ajuste de quiropraxia assistidos manualmente. Jornal de
Terapêutica Manipulativa e Fisiológica. 2005; 28(6):414–22. [PubMed: 16096041]
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 12
Colloca CJ, Keller TS, Gunzburg R, Vandeputte K, Fuhr AW. Resposta neurofisiológica a
manipulação intraoperatória da coluna lombossacral. Jornal de Fisiologia e Terapêutica
Manipulativa. 2000; 23(7):447–57.
Manuscrito do autor do NIH-PA
Colloca CJ, Keller TS, Gunzburg R. Caracterização neuromecânica da coluna lombar in vivo
manipulação. Parte II. Resposta neurofisiológica. Jornal de Fisiologia e Terapêutica
Manipulativa. 2003; 26(9):579–91.
Colloca CJ, Keller TS, Harrison DE, Moore RJ, Gunzburg R, Harrison DD. Força de manipulação espinhal
e a duração afetam o movimento vertebral e as respostas neuromusculares. Biomecânica Clínica. 2006;
21:254–62. [PubMed: 16378668]
Dagenais S, Gay RE, Tricco AC, Freeman MD, Mayer JM. Conceitos contemporâneos NASS em coluna vertebral
cuidados: Terapia de manipulação espinhal para dor lombar aguda. O Jornal da Espinha. 2010; 10:918–40.
[PubMed: 20869008]
Davis BM, Collins WF, Mendell LM. Potenciação da transmissão nas conexões Ia-motoneurônios
induzida por repetidas explosões curtas de atividade aferente. J de Neurofisiologia. 1985; 54(6):1541–52.
Dishman JD, Ball KA, Burke J. Mudanças na excitabilidade motora central após manipulação espinhal, uma
estudo de estimulação magnética transcraniana. Jornal de Fisiologia e Terapêutica Manipulativa.
2002; 25(1):1–9.
Edin BB, Essick GK, Trulsson M, Olsson KA. Codificação do receptor de estímulos táteis em movimento em humanos.
I. Padrão temporal de descarga de mecanorreceptores individuais de baixo limiar. J de Neurociências. 1995;
15(1):830–47.
Ernst E, Gilbey A. Reivindicações de Quiropraxia no mundo de língua inglesa. A Medicina da Nova Zelândia
Diário. 2010; 123(1312):36–44. [PubMed: 20389316]
Manuscrito do autor do NIH-PA
Farfan, HF. A base científica dos procedimentos de manipulação. In: Buchanan, WW.; Kahn, MF.; Laine,
V.; Rodnan, GP.; Scott, JT.; Zvaifler, NJ.; Grahame, R., editores. Clínicas em doenças reumáticas.
WB Saunders Company Ltd.; Londres: 1980. pág. 159-77.
Gál J, Herzog W, Kawchuk G, Conway PJ, Zhang YT. Movimentos das vértebras durante a manipulação
estocadas em cadáveres humanos não embalsamados. Jornal de Fisiologia e Terapêutica Manipulativa.
1997a; 20(1):30–40.
Gál J, Herzog W, Kawchuk G, Conway PJ, Zhang YT. Medições de translações vertebrais usando
pinos ósseos, marcadores de superfície e acelerômetros. Biomecânica Clínica. 1997b; 12(5):337–340.
George SZ, Bishop MD, Bialosky JE, Zeppieri G Jr. Efeitos imediatos da coluna vertebral
manipulação na sensibilidade à dor térmica: um estudo experimental. Distúrbios musculoesqueléticos do BMC.
2006; 7:68. [PubMed: 16911795]
Giles, LGF. Bases anatômicas da dor lombar. Williams & Wilkins; Baltimore: 1989.
Giles LG, Taylor Jr. Cápsula articular zigapofisária humana e inervações da prega sinovial. Britânico
Revista de Reumatologia. 1987; 26(2):93–8. [PubMed: 2435355]
Gillette RG. Um argumento especulativo para a coativação de diversas populações de receptores somáticos por
ajustes quiropráticos vigorosos. Medicina Manual. 1987; 3:1–14.
Graham BA, Clausen P, Bolton PS. Um estudo descritivo dos perfis de força e deslocamento do
procedimento de manipulação espinhal de alternância e recuo (ajuste), realizado por quiropráticos.
Manuscrito do autor do NIH-PA
Terapia manual. 2010; 15:74–9. [PubMed: 19679503]
Groen GJ, Baljet B, Drukker J. Nervos e plexos nervosos da coluna vertebral humana. americano
Jornal de Anatomia. 1990; 188:282–96. [PubMed: 2371968]
Haldeman, S. A base clínica para discussão dos mecanismos de terapia manipulativa. In: Korr, IM.,
editor. Os mecanismos neurobiológicos na terapia manipulativa. Plenário; Nova York: 1978. pág.
53-75.
Henderson, CNR. Três teorias neurofisiológicas sobre a subluxação quiroprática. Em: Gatterman, MI.,
editor. Fundamentos da Quiropraxia: subluxação. Elsevier Mosby; São Luís: 2005. p. 296-303.
Herzog W. A biomecânica da manipulação espinhal. Jornal de Terapias Corporais e do Movimento.
2010; 14:280–6. [PubMed: 20538226]
Herzog W, Conway PJ, Kawchuk GN, Zhang Y, Hasler EM. Forças exercidas durante a coluna
terapia manipulativa. Coluna. 1993; 18(9):1206–12. [PubMed: 8362328]
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 13
Hounsgaard J, Hultborn H, Kiehn O. Propriedades controladas pelo transmissor de alfa-motoneurônios causando
descarga do motor de longa duração para breves entradas excitatórias. Progresso na pesquisa do
cérebro. 1986; 64:39–49.
Manuscrito do autor do NIH-PA
Ianuzzi A, Khalsa PS. Comparação de cepas da cápsula articular da faceta lombar humana durante simulação de alta
velocidade, manipulação espinhal de baixa amplitude versus movimentos fisiológicos. O Jornal da Espinha.
2005a; 5:277–90. [PubMed: 15863084]
Ianuzzi A, Khalsa PS. A alta taxa de carga durante a manipulação espinhal produz uma cápsula facetária única
padrões de deformação em comparação com rotações axiais. Jornal de Terapêutica Manipulativa
e Fisiológica. 2005b; 28(9):673–87. [PubMed: 16326237]
Ikeda H, Asai T, Murase K. Mudanças robustas de excitação induzida por aferentes no corno dorsal espinhal de rato
após condicionar a estimulação de alta frequência. Jornal de Neurofisiologia. 2000; 83:2412–20.
[PubMed: 10758142]
Jackson HC, Winkelmann RK, Bickel WH. Terminações nervosas na coluna vertebral lombar humana e
estruturas relacionadas. Diário de cirurgia de osso e junta. 1966; 48-A(7):1272–81. [PubMed: 5921784]
Jiang H, Russell G, Raso J, Moreau MJ, Hill DL, Bagnall KM. A natureza e distribuição do
inervações dos ligamentos supraespinhais e interespinhais humanos. Coluna. 1995; 20(80):869–76.
[PubMed: 7644951]
Kawchuk GN, Herzog W, Hasler EM. Forças geradas durante a terapia manipulativa espinhal do
coluna cervical: um estudo piloto. Jornal de Terapêutica Manipulativa e Fisiológica. 1992; 15(5): 275–8.
[PubMed: 1613409]
Kawchuk GN, Herzog W. Caracterização biomecânica (impressão digital) de cinco novos métodos de
manipulação da coluna cervical. Jornal de Terapêutica Manipulativa e Fisiológica. 1993; 16(9): 573–7.
Manuscrito do autor do NIH-PA
[PubMed: 8133191]
Kawchuk GN, Prasad N, McLeod RC, Liddle T, Li T, Zhu Q. Variabilidade da magnitude da força e força
duração em técnicas de manipulação manuais e baseadas em instrumentos. Jornal de Terapêutica
Manipulativa e Fisiológica. 2006; 29(8):611–18. [PubMed: 17045094]
Kawchuk GN, Perle SM. A relação entre o ângulo de aplicação da terapia manipulativa espinhal
(SMT) e acelerações vertebrais resultantes em um modelo suíno in vivo. Terapia manual. 2009;
14:480–3. [PubMed: 19144558]
Keller TS, Colloca CJ. A manipulação espinhal por força mecânica aumenta a força muscular do tronco avaliada
por eletromiografia: um ensaio clínico comparativo. Jornal de Terapêutica Manipulativa e
Fisiológica. 2000; 23(9):585–95. [PubMed: 11145798]
Keller TS, Colloca CJ, Gunzburg R. Caracterização neuromecânica da coluna lombar in vivo
manipulação. Parte 1. Movimento vertebral. Jornal de Terapêutica Manipulativa e Fisiológica. 2003;
26:567–78. [PubMed: 14673406]
Keller TS, Colloca CJ, Moore RJ, Gunzburg R, Harrison DH. Aumento do movimento lombar multiaxial
respostas durante a manipulação espinhal manualmente assistida por força mecânica de impulso
múltiplo. Quiropraxia e Osteopatia. 2006a; 14:6. doi:10.1186/1746-1340-14-6. [PubMed: 16597343]
Keller ST, Colloca CJ, Moore RJ, Gunzburg R, Harrison DE, Harrison DD. Tridimensional
movimentos vertebrais produzidos por força mecânica de manipulação espinhal. Jornal de Terapêutica
Manuscrito do autor do NIH-PA
Manipulativa e Fisiológica. 2006b; 29(6):425–36. [PubMed: 16904488]
Koppenhaver SL, Fritz JM, Hebert JJ, Kawchuk GN, Childs JD, Parent EC, Gill NW, Teyhen DS.
Associação entre alterações na espessura dos músculos multífidos abdominais e lombares e melhora
clínica após manipulação da coluna vertebral. J Fisioterapia Ortopédica e Esportiva. 2011; 41:389–99.
Korr, IM. Os mecanismos neurobiológicos na terapia manipulativa. Imprensa Plenária; Nova York: 1978.
Korr IM. Proprioceptores e disfunção somática. Jornal da Associação Americana de Osteopatia. 1975;
74:638–50.
Kuchera, WA.; Kappler, R.E. Exame musculoesquelético para disfunção somática. In: Ward, RC.;
Hruby, RJ.; Jerônimo, JA.; Jones, JM.; Kappler, RE., editores. Fundamentos da Medicina Osteopática.
Lippincott Williams & Wilkins; 2002. pág. 633-59.
Lau HMC, Chiu TTW, Lam TH. A eficácia da manipulação torácica em pacientes com doença crônica
dor cervical mecânica – um ensaio clínico randomizado. Terapia manual. 2011; 16:141–7. [PubMed:
20813577]
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 14
Leach, RA. As teorias da Quiropraxia. Lippincott Williams & Wilkins; Filadélfia: 2004.
Lee, M.; Gal, J.; Herzog, W. Biomecânica da terapia manual. In: Dvir, Z., editor. Clínico
biomecânica. Churchill Livingston; Nova York: 2000. p. 209-38.
Manuscrito do autor do NIH-PA
Lewit, K. Terapia manipulativa na reabilitação do aparelho locomotor. Butterworth-Heinemann;
Oxford: 1991.
Liu X, Sandkühler J. Caracterização da potenciação de longo prazo de potenciais evocados por fibra C na coluna vertebral
corno dorsal de rato adulto: papel essencial dos receptores NK1 e NK2. Jornal de Neurofisiologia.
1997; 78(4):1973–82. [PubMed: 9325365]
Luscher HR, Ruenzel PW, Henneman E. Efeitos da frequência de impulso, PTP e temperatura em
respostas provocadas em grandes populações de motoneurônios por impulsos em fibras Ia únicas. Jornal
de Neurofisiologia. 1983; 50(5):1045–58. [PubMed: 6315900]
Maigne JY, Guillon F. Destaque dos movimentos intervertebrais e variações da pressão intradiscal
durante a manipulação da coluna lombar: um estudo de viabilidade. Jornal de Terapêutica Manipulativa e
Fisiológica. 2000; 23(8):531–5. [PubMed: 11050609]
Mateus PBC. A resposta dos receptores do fuso muscular deseferenciados ao alongamento em diferentes
velocidades. Jornal de Fisiologia. 1963; 168:660–78. [PubMed: 14067950]
Matthews PBC, Stein RB. A sensibilidade dos fusos musculares aferentes a pequenas alterações sinusoidais de
comprimento. Jornal de Fisiologia. 1969; 200:723–43. [PubMed: 4237132]
McLain RF. Terminações mecanorreceptoras nas articulações cervicais humanas. Coluna. 1994; 19(5):495–501.
[PubMed: 8184340]
Mendel T, Wink C, Zimny M. Elementos neurais em discos intervertebrais cervicais humanos. Coluna. 1992;
Manuscrito do autor do NIH-PA
17(2):132–5. [PubMed: 1372767]
Mense, S. Fibras aferentes de condução lenta de tecidos profundos: propriedades neurobiológicas e centrais
ações nervosas. In: Autum, H.; Ottoson, D.; Perl, ER.; Schmidt, RF.; Shimazu, H.; Willis, WD., editores.
Progresso na fisiologia sensorial. Springer-Verlag; Nova York: 1986. pág. 139-217.
Miller J, Gross A, D'Sylva J, Burnie SJ, Goldsmith CH, Graham N, Haines T, Brønfort G, Hoving JL.
Terapia manual e exercícios para dor cervical: uma revisão sistemática. Terapia manual. 2010; 15:334–54.
[PubMed: 20593537]
Nakamura S, Takahashi K, Takahashi Y, Morinaga T, Shimada Y, Moriya H. Origem dos nervos
suprindo a porção posterior dos discos intervertebrais lombares no rato. Coluna. 1996; 21:917–24.
[PubMed: 8726193]
Ngan JMW, Chow DHK, Holmes AD. A cinemática e as consistências intra e inter-terapeutas de
manipulação rotacional cervical inferior. Engenharia Médica e Física. 2005; 27:395–401.
[PubMed: 15863348]
Pickar JG. Efeitos neurofisiológicos da manipulação espinhal. O Jornal da Espinha. 2002; 2:357–71.
[PubMed: 14589467]
Pickar JG. Uma preparação in vivo para investigar respostas neurais à carga controlada de uma região lombar
vértebra no gato anestesiado. Jornal de Métodos de Neurociências. 1999; 89:87–96. [PubMed:
10491938]
Manuscrito do autor do NIH-PA
Pickar JG, Wheeler JD. Resposta dos proprioceptores musculares às cargas semelhantes à manipulação espinhal no
gato anestesiado. Jornal de Terapêutica Fisiológica Manipulativa. 2001; 24(1):2–11.
Pickar JG, Kang YM. Respostas do fuso muscular paraespinhal à duração de uma manipulação espinhal
sob controle da força. Jornal de Terapêutica Manipulativa e Fisiológica. 2006; 29:22–31.
[PubMed: 16396726]
Pickar JG, Sung PS, Kang YM, Ge W. A resposta dos fusos musculares paraespinhais lombares é maior para
carga manipulativa espinhal em comparação com carga mais lenta sob controle de comprimento. O Jornal
da Espinha. 2007; 7:583–95. [PubMed: 17905321]
Randic M, Jiang MC, Cerne R. Potenciação de longo prazo e depressão de longo prazo do aferente primário
neurotransmissão na medula espinhal de ratos. Jornal de Neurociências. 1993; 13(12):5228–41.
[PubMed: 8254370]
Richmond FJR, Abrahams VC. Propriedades fisiológicas dos fusos musculares nos músculos dorsais do pescoço de
o gato. Jornal de Neurofisiologia. 1979; 42(20):604–16. [PubMed: 154558]
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 15
Richmond FRJ, Bakker DA. Organização anatômica e conteúdo de receptores sensoriais de tecidos moles
ao redor das vértebras cervicais superiores no gato. Jornal de Neurofisiologia. 1982; 48(1):49–61.
[PubMed: 6214617]
Manuscrito do autor do NIH-PA
Richmond, FJR.; Bakker, DA.; Stacy, MJ. O Sensorium: receptores dos músculos e articulações do pescoço.
In: Peterson, BW.; Richmond, FJ., editores. Controle do movimento da cabeça. Imprensa da Universidade de Oxford; Nova
York: 1988. pág. 49-62.
Roberts S, Eisenstein SM, Menage J, Evans EH, Ashton IK. Mecanorreceptores nos discos intervertebrais
morfologia, distribuição e neuropeptídeos. Coluna. 1995; 20:2645–51. [PubMed: 8747242]
Rose PK, Keirstead SA. Projeção segmentar a partir dos fusos musculares: uma perspectiva da parte superior
medula espinhal cervical. Jornal Canadense de Fisiologia e Farmacologia. 1986; 64:505–8.
Rubinstein SM, van Middelkoop M, Assendelft WJJ, de Boer MR, van Tulder MW. Espinhal
terapia manipulativa para dor lombar crônica. Banco de Dados Cochrane de Revisões Sistemáticas. 2011;
(Edição 2) Art. Nº: CD008112. DOI:10.1002/14651858.CD008112.pub2.
Sato M. Resposta dos corpúsculos de Pacini à vibração sinusoidal. Jornal de Fisiologia. 1961;
159:391–409. [PubMed: 14497425]
Sandkühler, J. Potenciação de longo prazo nas vias da dor. In: Basbaum, AI.; Bushnell, MC., editores.
Ciência da dor. Elsevier; Amsterdã: 2009. p. 401-6.
Canção XJ, Gan Q, Cao JL, Wang ZB. A manipulação espinhal reduz a dor e a hiperalgesia após
Inflamação do forame intervertebral lombar em ratos. Jornal de Terapêutica Manipulativa e
Fisiológica. 2006; 29(1):5–13. [PubMed: 16396724]
Sportelli, L.; Tarola, G. Documentação e manutenção de registros. In: Haldeman, S.; Dagenais, S.; Budell,
Manuscrito do autor do NIH-PA
B.; Grunnet-Nilsson, N.; Hooper, PD.; Meeker, WC.; Triano, J., editores. Princípios e prática da
Quiropraxia. 3ª edição. McGraw-Hill; Nova York: 2005. pág. 725-41.
Stilwell DL. O suprimento nervoso da coluna vertebral e suas estruturas associadas no macaco. O
Registro Anatômico. 1956; 125(20):139–64. [PubMed: 13354975]
Stuart DG, Goslow GE, Mosher CG, Reinking RM. Capacidade de resposta ao estiramento dos órgãos tendinosos de Golgi.
Pesquisa Experimental do Cérebro. 1970; 10:463–476.
Sung PS, Kang YM, Pickar JG. Efeito da duração da manipulação espinhal no limiar baixo
mecanorreceptores nos músculos paraespinhais lombares: um relatório preliminar. Coluna. 2005; 30:115–22.
[PubMed: 15626991]
Suter E, Herzog W, Conway PJ, Zhang YT. Resposta reflexa associada ao tratamento manipulativo de
a coluna torácica. Jornal do Sistema Neuromusculoesquelético. 1994; 2:124–30.
Suter E, McMorland G, Herzog W, Bray R. O tratamento conservador da região lombar reduz a inibição em
músculos extensores do joelho: um ensaio clínico randomizado. Jornal de Terapêutica Manipulativa
e Fisiológica. 2000; 23(2):76–80. [PubMed: 10714531]
Triano, J. A mecânica da manipulação espinhal. In: Herzog, W., editor. Biomecânica clínica de
manipulação espinhal. Churchill Livingstone; Nova York: 2001. p. 92-190.
Triano J, Schultz AB. Cargas transmitidas durante a terapia manipulativa da coluna lombossacra. Coluna. 1997;
22:1955–64. [PubMed: 9306523]
Manuscrito do autor do NIH-PA
Vernon, H. Justificativa biológica para possíveis benefícios da manipulação da coluna vertebral. In: Cherkin, DC.; Mootz,
R.D., editores. Quiropraxia nos Estados Unidos: Treinamento, Prática e Pesquisa. 1997. pág.
105-115.Publicação AHCPR nº 98-N002
Vicenzino B, Neal R, Collins D, Wright A. O deslocamento, velocidade e perfil de frequência do
movimento no plano frontal produzido pela técnica de tratamento de deslizamento lateral. Biomecânica Clínica.
1999; 14:515–21. [PubMed: 10521635]
Walker BF, French SD, Grant W, Green S. Intervenções quiropráticas combinadas para dor lombar.
Banco de Dados Cochrane de Revisões Sistemáticas. 2010; (Edição 4) Art. Nº: CD005427. DOI:
10.1002/14651858.CD005427.pub2.
Branco DM, Levine JD. Diferentes mecanismos de transdução mecânica para o imediato e o tardio
respostas dos nociceptores de fibra C de ratos. Jornal de Neurofisiologia. 1991; 66(2):363–8. [PubMed:
1774578]
Wiese, G.; Chamador. Uma história de manipulação espinhal. In: Haldeman, S., editor. Princípios e
prática da quiropraxia. 3ª Edição. McGraw-Hill; Nova York: 2005. pág. 5-22.
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 16
Wilder DG, Papa MH, Frymoyer JW. A biomecânica da hérnia de disco lombar e o efeito da
sobrecarga e instabilidade. Jornal de distúrbios da coluna vertebral. 1988; 1:16–32. [PubMed: 2980059]
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 17
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
Figura 1.
Curvas de tempo de força derivadas de manipulações espinhais de alta velocidade e baixa amplitude
aplicadas a humanos (A e B) e para um dispositivo de simulação (C).Amostra as fases e a força relativa
que ocorre durante a manobra. (Modificado da Figura 1, Herzog W J. Bodywork & Movement Therapies
2010;14:280-6)Bmostra as curvas médias de força-tempo das manipulações aplicadas às regiões cervical,
torácica e sacroilíaca. Modificado da Figura 9 Herzog W, et al. Espinha 1993;18(9):1206-12.Cmostra as
curvas força-tempo de uma manipulação de recuo alternado realizada com um contato esquerdo (painel
esquerdo) e um contato direito (painel direito). Modificado da Figura 2 Graham BA, et al. Terapia Manual
2010; 15:74-9
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 18
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
Figura 2.
Resposta do fuso muscular paraespinhal lombar a uma carga semelhante à manipulação espinhal de alta
velocidade e baixa amplitude.Amostra um traçado original da resposta de um fuso à manipulação. A
inserção mostra a descarga do fuso em uma escala de tempo expandida. (Adaptado de Journal of
Manipulative and Physiological Therapeutics. 24(2):2-11, Pickar J & Wheeler JD, Resposta dos
proprioceptores musculares às cargas semelhantes à manipulação espinhal no gato anestesiado, p6,
2001, com permissão da Elsevier)Bmostra traçados originais da resposta aferente de um fuso muscular a
6 durações de impulso diferentes (400, 200, 100, 50, 25 e 12,5 ms) usando uma forma de onda semi-
senoidal. (Adaptado de Journal of Manipulative and Physiological. Therapeutics. 29(1):22-31, Pickar JG &
Kang YM, Respostas do fuso muscular paraespinhal à duração de uma manipulação espinhal sob controle
de força p26, 2006, com permissão da Elsevier)
Manuscrito do autor do NIH-PA
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 19
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
Figura 3.
Resposta aferente do fuso muscular cervical à rotação rápida do C2vértebra simulando a fase de impulso de
uma manipulação espinhal de alta velocidade e baixa amplitude. Em cada painel (A, B, C, D) o traço superior
mostra uma gravação original da atividade do fuso, o traço do meio mostra a frequência de descarga
instantânea (largura do compartimento 0,125s) e o traço inferior mostra o C2
posição relativa da vértebra. PainelAmostra uma diminuição na atividade aferente do fuso muscular durante o
impulso e painelBmostra um aumento em sua frequência durante o deslocamento para a direita. Os dois
painéis inferiores mostram a resposta do fuso muscular ao deslocamento vertebral inicialmente para a
esquerda e depois para a direita e de volta à linha média (C) e depois com deslocamento
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 20
inicialmente para a direita e depois para a esquerda e de volta à linha média (D). Observe que o deslocamento
DC (artefato de movimento) no traçado dos registros originais do fuso muscular (Atividade da Unidade Bruta) é
maior quando a vértebra é deslocada contralateralmente à raiz dorsal curta que está sendo registrada. (Bolton
Manuscrito do autor do NIH-PA
PS e Holland CT 1998 dados não publicados).
Manuscrito do autor do NIH-PA
Manuscrito do autor do NIH-PA
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Pickar e Bolton Página 21
tabela 1
Esta tabela lista os receptores que foram identificados nos tecidos paravertebrais das regiões cervical (C), torácica (T),
Manuscrito do autor do NIH-PA
lombar (L) ou coccígea (Cx) da coluna vertebral usando métodos morfológicos (M) ou fisiológicos.
(P) estudos. As espécies nas quais os respectivos receptores foram estudados são listadas juntamente com uma
referência a um estudo envolvendo a espécie e o tipo de estudo.
Receptor Região tipo de estudo Espécies Evidência (ver por exemplo)
Fuso muscular C P Gato Richmond & Abrahams 1979
M Gato Richmond & Bakker 1982
M Humano Boyd-Clarke et al 2002
C,T,L M Humano Amonoo-Kuofi 1983
eu P Gato Cao et al 2009
Órgão Tendinoso de Golgi C P Gato Richmond & Abrahams 1979
M Gato Richmond & Abrahams 1982
M Humano Mendel et al 1992
eu M Humano Roberts e outros 1995 Roberts e
Cx M Bovino outros 1995 Richmond &
Paciniforme C M Gato Abrahams 1982 McLain 1994
Manuscrito do autor do NIH-PA
Corpúsculo M Humano
eu M Feto Humano Jackson e outros 1966
M Humano Jackson e outros 1966
Cx M Bovino Roberts e outros 1995
Ruffini eu M Humano Roberts e outros 1995
Final Jiang e outros 1995
Não encapsulado C M Humano Mendel e outros 1992
Terminações Nervosas C,T,L M Macaco Stilwell 1956
M Feto Humano Groen e outros 1990
eu M Rato Nakamura e outros 1996
M Feto Humano Jackson e outros 1966
M Humano Jackson e outros 1966
Manuscrito do autor do NIH-PA
J Eletromiogr Kinesiol. Manuscrito do autor; disponível no PMC 2013 em 01 de outubro.
Você também pode gostar
- Mobilização do SN: Diagnóstico e TratamentoDocumento13 páginasMobilização do SN: Diagnóstico e TratamentoTANIAMSMAinda não há avaliações
- Seminário sobre técnica de manipulação Original X TIQDocumento136 páginasSeminário sobre técnica de manipulação Original X TIQThiagoBüttenbenderFerreira67% (3)
- Análise Do Efeito Da Terapia de Liberação Posicional em Pacientes Com Cervicalgia e Cefaleia Tensional Revisão de LiteraturaDocumento5 páginasAnálise Do Efeito Da Terapia de Liberação Posicional em Pacientes Com Cervicalgia e Cefaleia Tensional Revisão de LiteraturaLucas FonsecaAinda não há avaliações
- Apostila Mobilização NeuralDocumento47 páginasApostila Mobilização NeurallineserafimAinda não há avaliações
- OMT: Uma Abordagem Científica para o Tratamento da DorDocumento5 páginasOMT: Uma Abordagem Científica para o Tratamento da DorCENTRO DE TRATAMENTO DA DOR DR. ANDRÉ FRAREAinda não há avaliações
- Artigo 1Documento7 páginasArtigo 1jonathan leandroAinda não há avaliações
- Os Mecanismos Da Terapia Manual No Tratamento Da Dor MusculoesqueléticaDocumento14 páginasOs Mecanismos Da Terapia Manual No Tratamento Da Dor MusculoesqueléticaMilton Ricardo de Medeiros FernandesAinda não há avaliações
- Benefícios da eletroestimulação na recuperação muscular após cirurgia de ligamento cruzado anteriorDocumento6 páginasBenefícios da eletroestimulação na recuperação muscular após cirurgia de ligamento cruzado anteriorSandro FernandesAinda não há avaliações
- Segurança Do Ultrassom TerapêuticoDocumento4 páginasSegurança Do Ultrassom TerapêuticoDianaFurtadoAinda não há avaliações
- A Base Neural Da Lesão Osteopática - Irvan M. KorrDocumento22 páginasA Base Neural Da Lesão Osteopática - Irvan M. KorrnunoAinda não há avaliações
- 18549-Article Text-7693-31752-10-20170830Documento8 páginas18549-Article Text-7693-31752-10-20170830anefernandes98Ainda não há avaliações
- Tensão e Modulação TraduzidoDocumento12 páginasTensão e Modulação Traduzidodanahur.andradeAinda não há avaliações
- Métodos Treino Estabilidade CentralDocumento9 páginasMétodos Treino Estabilidade Centralbacharelado2010Ainda não há avaliações
- Fenol para EspasticidadeDocumento3 páginasFenol para EspasticidadeValdonei SantosAinda não há avaliações
- Efeito Da Inibição MuscularDocumento6 páginasEfeito Da Inibição MuscularÍtalo F. Menezes MarquesAinda não há avaliações
- Ebook Mobilizao NeuralDocumento14 páginasEbook Mobilizao NeuralClecia FerreiraAinda não há avaliações
- Bandas Neuromusculares - IsquiotibiaisDocumento14 páginasBandas Neuromusculares - IsquiotibiaisJoana ValenteAinda não há avaliações
- Estudo Fisiologia Neuro Reflexos Unidades MotorasDocumento5 páginasEstudo Fisiologia Neuro Reflexos Unidades Motorasleo1221Ainda não há avaliações
- Fisiologia e importância do órgão tendinoso de GolgiDocumento6 páginasFisiologia e importância do órgão tendinoso de GolgicsfirebladeAinda não há avaliações
- Análise Da Atividade Eletromiográfica de Superfície de Art 2Documento6 páginasAnálise Da Atividade Eletromiográfica de Superfície de Art 2Melyssa SanzoneAinda não há avaliações
- Importância da propriocepção na reabilitação após lesões musculoesqueléticasDocumento6 páginasImportância da propriocepção na reabilitação após lesões musculoesqueléticasGaby MussioAinda não há avaliações
- Beatriz-Revsaude, 6 - Reabilitação Após Lesão (8006)Documento8 páginasBeatriz-Revsaude, 6 - Reabilitação Após Lesão (8006)Jenifer MendesAinda não há avaliações
- Pontos Gatilhos MiofasciaisDocumento18 páginasPontos Gatilhos MiofasciaisdoctorhealthAinda não há avaliações
- Mob. Neural CaptDocumento15 páginasMob. Neural CaptEnayle FernandesAinda não há avaliações
- Mobilização Neural para Distúrbios MusculoesqueléticosDocumento11 páginasMobilização Neural para Distúrbios MusculoesqueléticosMarta PereiraAinda não há avaliações
- Bandas Neuromusculares: Qual A Evidência Que Sustenta A Sua Utilização?Documento5 páginasBandas Neuromusculares: Qual A Evidência Que Sustenta A Sua Utilização?ClaudiaPresasAinda não há avaliações
- Mobilização NeuralDocumento4 páginasMobilização NeuralAndréia Gilvana100% (1)
- Aula 20.04.20-Estudo Dirigido-Anatomia-Sistema Muscular 2-Prof. Jorge BeckDocumento4 páginasAula 20.04.20-Estudo Dirigido-Anatomia-Sistema Muscular 2-Prof. Jorge BeckGisele AndradeAinda não há avaliações
- A Utilização Da Estimulação Elétrica Funcional para A Reabilitação NeurológicaDocumento6 páginasA Utilização Da Estimulação Elétrica Funcional para A Reabilitação NeurológicaLara MurielAinda não há avaliações
- Estudo Do Efeito Da Corrente Interferencial Na Tensão Muscular em DTM FisioBrasil 2011 PDFDocumento7 páginasEstudo Do Efeito Da Corrente Interferencial Na Tensão Muscular em DTM FisioBrasil 2011 PDFMichele GonçalvesAinda não há avaliações
- Resposta neuromuscular após alongamento e aquecimentoDocumento9 páginasResposta neuromuscular após alongamento e aquecimentoWesley DamacenoAinda não há avaliações
- Conceitos de Facilitação Neuromuscular ProprioceptivaDocumento9 páginasConceitos de Facilitação Neuromuscular Proprioceptivandondo nzomambu simaoAinda não há avaliações
- Avaliação do tônus muscularDocumento4 páginasAvaliação do tônus muscularSimone de PaulaAinda não há avaliações
- Estimulação magnética transcraniana: perspectivas terapêuticasDocumento12 páginasEstimulação magnética transcraniana: perspectivas terapêuticasJunio AlvesAinda não há avaliações
- Ebook Cinetica Bandagem FuncionalDocumento21 páginasEbook Cinetica Bandagem FuncionalMarkus Vinicius100% (7)
- Cicatrizes Neurobiológicas do TEPTDocumento11 páginasCicatrizes Neurobiológicas do TEPTanaclaudia85Ainda não há avaliações
- Mobilização Sistema NervosoDocumento16 páginasMobilização Sistema NervosoTatiCorradiniAinda não há avaliações
- ANÁLISE BIOMECÂNICA DOS MÚSCULOS ESTABILIZADORES DA OmbroDocumento6 páginasANÁLISE BIOMECÂNICA DOS MÚSCULOS ESTABILIZADORES DA OmbroAdriano Luiz BarbosaAinda não há avaliações
- Revisão das abordagens fisioterapêuticas na AMEDocumento7 páginasRevisão das abordagens fisioterapêuticas na AMESimone AlineAinda não há avaliações
- Flexibilidade - Aspectos Fisiológicos e Fatores LimitantesDocumento6 páginasFlexibilidade - Aspectos Fisiológicos e Fatores LimitantesRodrigo Santos0% (1)
- Tratamento da DTM com laserDocumento3 páginasTratamento da DTM com laserPaloma Nogueira Rodrigues Crispim AlvaresAinda não há avaliações
- QuiropraxiaDocumento404 páginasQuiropraxiaNicoly OritaAinda não há avaliações
- wang2017 Fatores neurais e não neurais_240316_1750_240316_175116 (1)Documento12 páginaswang2017 Fatores neurais e não neurais_240316_1750_240316_175116 (1)gabrielsousa.xd17Ainda não há avaliações
- Síndrome Do Túnel Do Carpo - ArtDocumento6 páginasSíndrome Do Túnel Do Carpo - ArtVitor AragãoAinda não há avaliações
- Eficácia da acupuntura em pontos gatilhoDocumento14 páginasEficácia da acupuntura em pontos gatilhoDebora BandeiraAinda não há avaliações
- Pontos GatilhosDocumento6 páginasPontos GatilhosRonnie Patricia DiasAinda não há avaliações
- DTM: Disfunção TemporomandibularDocumento36 páginasDTM: Disfunção TemporomandibularCatarina Mascarenhas Ferrari100% (1)
- Dor MiofascialDocumento55 páginasDor MiofascialSérgyo CostaAinda não há avaliações
- Terapia Bobath e Teoria dos SistemasDocumento48 páginasTerapia Bobath e Teoria dos SistemasMaria SilvaAinda não há avaliações
- Reabilitação de lesões do plexo braquialDocumento8 páginasReabilitação de lesões do plexo braquialGermano SilvaAinda não há avaliações
- Neuromuscular Electrical Stimulation For - En.ptDocumento15 páginasNeuromuscular Electrical Stimulation For - En.ptMatheus AlmeidaAinda não há avaliações
- Yoga e A Biomecanica FuncionalDocumento30 páginasYoga e A Biomecanica FuncionalLuislemesAinda não há avaliações
- Ebook Cinesiologia e BiomecânicaDocumento24 páginasEbook Cinesiologia e BiomecânicaControladoria PMNRAinda não há avaliações
- 16443-Texto Do Artigo-49975-1-10-20140616Documento3 páginas16443-Texto Do Artigo-49975-1-10-20140616Emanuela PereiraAinda não há avaliações
- Cap (1) - 01 - Aparelho EstomatognáticoDocumento17 páginasCap (1) - 01 - Aparelho EstomatognáticoJoão Paulo Lyra SilvaAinda não há avaliações
- Workshop PNF CilentoDocumento10 páginasWorkshop PNF CilentoRaquel Campani Serrazine67% (3)
- Efeito imediato da acupuntura na lombalgia: Sistema Yamamura de Acupuntura do Osso Nasal e do ponto craniométrico lambdaNo EverandEfeito imediato da acupuntura na lombalgia: Sistema Yamamura de Acupuntura do Osso Nasal e do ponto craniométrico lambdaAinda não há avaliações
- Carga de Trabalho: indicadores para a gestão de distúrbios músculos-esqueléticos em fisioterapeutasNo EverandCarga de Trabalho: indicadores para a gestão de distúrbios músculos-esqueléticos em fisioterapeutasAinda não há avaliações
- Proporcionalidade e funções afinsDocumento188 páginasProporcionalidade e funções afinsAndradeAndradeAinda não há avaliações
- Introdução à estrutura e análise de compiladoresDocumento12 páginasIntrodução à estrutura e análise de compiladoresRayron VictorAinda não há avaliações
- Empoderamento EspiritualDocumento50 páginasEmpoderamento EspiritualcamilafferreiiraAinda não há avaliações
- Propriedade Dos Fluidos - Aula 2Documento31 páginasPropriedade Dos Fluidos - Aula 2sebastiaocostaAinda não há avaliações
- Marcio Peter de Souza Leite - Ineditos - Feminilidade GeneralizadaDocumento3 páginasMarcio Peter de Souza Leite - Ineditos - Feminilidade Generalizadathiagosilva26Ainda não há avaliações
- Datacenter Infrastructure Management Dcim e o Futuro Novas Oportunidades para o CanalDocumento12 páginasDatacenter Infrastructure Management Dcim e o Futuro Novas Oportunidades para o CanalMaluaAinda não há avaliações
- Rainha de Paus SerpenteDocumento2 páginasRainha de Paus SerpenteBrenda SalustianoAinda não há avaliações
- SKF 17-Nov-2017 - 14-00-56 PDFDocumento460 páginasSKF 17-Nov-2017 - 14-00-56 PDFWalber Soares100% (1)
- Atividade EngenhariaDocumento3 páginasAtividade EngenhariaLucas GuilhermeAinda não há avaliações
- Conceito de GuindautoDocumento12 páginasConceito de GuindautoCursoAinda não há avaliações
- Pnuma 2019Documento88 páginasPnuma 2019kassio tavaresAinda não há avaliações
- Lágrimas Misteriosas - Maria Vitoria BittencourtDocumento6 páginasLágrimas Misteriosas - Maria Vitoria Bittencourtclmts_6Ainda não há avaliações
- AC e identificação precoce do autismoDocumento12 páginasAC e identificação precoce do autismoSimão VicenteAinda não há avaliações
- Contrato de empréstimo pessoal: entenda as principais cláusulasDocumento9 páginasContrato de empréstimo pessoal: entenda as principais cláusulasMichael Willian de oliveiraAinda não há avaliações
- Certificado Logística Nível 4Documento2 páginasCertificado Logística Nível 4Job Moises Chauqe100% (2)
- Universidade Federal de AlagoasDocumento4 páginasUniversidade Federal de AlagoasElias VerasAinda não há avaliações
- Conteúdo Essencial-Unidade 3-Calculo NuméricoDocumento29 páginasConteúdo Essencial-Unidade 3-Calculo NuméricoJulia DiasAinda não há avaliações
- AEE No Brasil-Relatos Da Experiência de ProfessoresDocumento176 páginasAEE No Brasil-Relatos Da Experiência de ProfessoresTais MarangonAinda não há avaliações
- Ficha de Exercícios 1 Resolução de Problemas Utilizando Funções RacionaisDocumento3 páginasFicha de Exercícios 1 Resolução de Problemas Utilizando Funções RacionaisEmilia ReisAinda não há avaliações
- Ergonomia computadoresDocumento9 páginasErgonomia computadoresSandro MonteiroAinda não há avaliações
- Manual DECO 1800 Padrao 2008 - 4Documento19 páginasManual DECO 1800 Padrao 2008 - 4pcv22Ainda não há avaliações
- FisiologiaDocumento12 páginasFisiologiaAbujate Amade CasimroAinda não há avaliações
- Tipos de Pontes e sua Evolução ao Longo da HistóriaDocumento10 páginasTipos de Pontes e sua Evolução ao Longo da HistóriaRomana PonteAinda não há avaliações
- Etnografia e História Das Relaciones de Poder Entre Os Terena e o Estado BrasileiroDocumento420 páginasEtnografia e História Das Relaciones de Poder Entre Os Terena e o Estado BrasileiroPauline Ochoa León100% (1)
- Manual de Instruções Da Placa Peccinin CP300FDocumento44 páginasManual de Instruções Da Placa Peccinin CP300FPaulo Roberto Gaudio de Almeida100% (1)
- FISPQ - Detech 1001Documento5 páginasFISPQ - Detech 1001#dancostaAinda não há avaliações
- O pensamento econômico de GalbraithDocumento9 páginasO pensamento econômico de GalbraithGabriel de Carvalho Eiras AlvesAinda não há avaliações
- Teoria Cognitivista de AusubelDocumento13 páginasTeoria Cognitivista de AusubelJeronimo Corrêa CollaresAinda não há avaliações
- Termo AdesaoDocumento9 páginasTermo AdesaoDaniel canola antônioAinda não há avaliações