Você também pode gostar
- Atvidade 7Documento3 páginasAtvidade 7Sr PapiuissAinda não há avaliações
- IntegraisDocumento7 páginasIntegraisBruna MorranaAinda não há avaliações
- 01 - Cálculo IIDocumento6 páginas01 - Cálculo IIPabloAinda não há avaliações
- Integrais 2Documento7 páginasIntegrais 2darcfariaAinda não há avaliações
- Integração NuméricaDocumento13 páginasIntegração NuméricaDionisio RaonyAinda não há avaliações
- Integral DefinidoDocumento19 páginasIntegral DefinidoAgostinho Figurao ChihungueteAinda não há avaliações
- Integrais IndefinidasDocumento4 páginasIntegrais Indefinidaspedro ayaneAinda não há avaliações
- Regra Da CadeiaDocumento6 páginasRegra Da CadeiaRicardo João Abreu De Matos 2020Ainda não há avaliações
- Notas - Aula - 4 - Calculo GaussianaDocumento3 páginasNotas - Aula - 4 - Calculo GaussianaJony PhyAinda não há avaliações
- Aula 28 e 29Documento14 páginasAula 28 e 29Gabriel de jesusAinda não há avaliações
- Trabalho Cálculo 2Documento11 páginasTrabalho Cálculo 2Lucas MedeirosAinda não há avaliações
- Resumo de Integrais - Me Salva!Documento11 páginasResumo de Integrais - Me Salva!Ana PaulaAinda não há avaliações
- Integra IsDocumento11 páginasIntegra IsalinesantospereiraAinda não há avaliações
- Metodo de DerivaçãoDocumento19 páginasMetodo de DerivaçãoSilva AndreyAinda não há avaliações
- Slides 05 10 2020Documento21 páginasSlides 05 10 2020MATHEUS MENDES SEVERINOAinda não há avaliações
- Aula - Integração - 02-22Documento79 páginasAula - Integração - 02-22Lucas MartinsAinda não há avaliações
- Aula 05 - Revisão Derivada e IntegralDocumento18 páginasAula 05 - Revisão Derivada e IntegralDiullyAinda não há avaliações
- DERIVADASDocumento14 páginasDERIVADASBruna MorranaAinda não há avaliações
- Integral IndefinidaDocumento13 páginasIntegral IndefinidaAlexandre SilvaAinda não há avaliações
- Exercício SecanteDocumento3 páginasExercício SecanteGabrielaAinda não há avaliações
- Ebook Unidade 4Documento38 páginasEbook Unidade 4Murillo GumieroAinda não há avaliações
- Capítulo 3 - O Integral e As Suas AplicaçõesDocumento94 páginasCapítulo 3 - O Integral e As Suas AplicaçõesPedro FigueiraAinda não há avaliações
- Aula 15 e 16 - Diferencial, Antidiferencial e IntegralDocumento7 páginasAula 15 e 16 - Diferencial, Antidiferencial e IntegralPaulo De Tarso FerreiraAinda não há avaliações
- Integral IdaDocumento7 páginasIntegral IdaaudinhamAinda não há avaliações
- Merval Gonçalves - Cálculo IntegralDocumento30 páginasMerval Gonçalves - Cálculo IntegralCarlos VidigalAinda não há avaliações
- IntegraisDocumento6 páginasIntegraisMarcelo ColomboAinda não há avaliações
- Aula2-Diferenciação 02.03.2021Documento5 páginasAula2-Diferenciação 02.03.2021Jonathan Cantini BackAinda não há avaliações
- Aula de Integral - TFCDocumento20 páginasAula de Integral - TFCEstudanteAinda não há avaliações
- Técnicas de IntegraçãoDocumento72 páginasTécnicas de IntegraçãoLarissa Do ValeAinda não há avaliações
- Lista 1Documento11 páginasLista 1Antonio GabrielAinda não há avaliações
- Derivada TrabalhoDocumento20 páginasDerivada TrabalhoValige Pedro Valige FariaAinda não há avaliações
- Semana 01exDocumento4 páginasSemana 01exGabriel LucasAinda não há avaliações
- Aula IntegraisDocumento7 páginasAula IntegraisIsaac SandrickAinda não há avaliações
- Aula 26 - Mudanças de Variáveis Na Integral DuplaDocumento8 páginasAula 26 - Mudanças de Variáveis Na Integral DuplaMessionAinda não há avaliações
- Regras Integral (Primitivação)Documento5 páginasRegras Integral (Primitivação)zbonfimAinda não há avaliações
- Apostila Uidade 1Documento24 páginasApostila Uidade 1Pr-WallaceTonyAinda não há avaliações
- Integral RiemannDocumento14 páginasIntegral Riemannpedro ayaneAinda não há avaliações
- Af1 09recDocumento3 páginasAf1 09recPuto SantanaAinda não há avaliações
- Aula21 - Integral Por PartesDocumento26 páginasAula21 - Integral Por PartesAbgail PinheiroAinda não há avaliações
- Lista 3 DerivadaDocumento9 páginasLista 3 DerivadaFernando CarvalhoAinda não há avaliações
- Exame Rec 30 Jan 2019Documento4 páginasExame Rec 30 Jan 2019inesAinda não há avaliações
- Aula19 - TFC e Integrais IndefinidasDocumento37 páginasAula19 - TFC e Integrais IndefinidasAbgail PinheiroAinda não há avaliações
- Integral Def in IdaDocumento10 páginasIntegral Def in IdaRubensmeloAinda não há avaliações
- ALista16 - Teorema Fundamental Do CalculoDocumento3 páginasALista16 - Teorema Fundamental Do Calculoana luisaAinda não há avaliações
- Ficha9 (2) CD1Documento3 páginasFicha9 (2) CD1Margarida FidalgoAinda não há avaliações
- Calculo 3 Area II UFPEDocumento4 páginasCalculo 3 Area II UFPEAll TrecsAinda não há avaliações
- Aula3 DerivadasDocumento12 páginasAula3 DerivadasPeriettAshuraAinda não há avaliações
- Aula 13Documento9 páginasAula 13Caio NegrãoAinda não há avaliações
- Integrais Por DecomposicaoDocumento46 páginasIntegrais Por DecomposicaoJussa Alves JacintoAinda não há avaliações
- Q-2,5,11,17Lista 2 ProvaDocumento3 páginasQ-2,5,11,17Lista 2 ProvavictorAinda não há avaliações
- Teorema Fundamental Do CálculoDocumento3 páginasTeorema Fundamental Do CálculoWagner Aguilera ManoelAinda não há avaliações
- Integral IDocumento10 páginasIntegral IRaimundo Renato RabeloAinda não há avaliações
- Lista Derivadas Parte1Documento7 páginasLista Derivadas Parte1ArthurAinda não há avaliações
- Propriedades Da Integral DefinidaDocumento3 páginasPropriedades Da Integral DefinidaFábio doPneuAinda não há avaliações
- 29-Integração Por PartesDocumento17 páginas29-Integração Por Partesnatalialiberato15Ainda não há avaliações
- Apontamentos AMII BQ Q 2011 2012Documento62 páginasApontamentos AMII BQ Q 2011 2012Araujo Portacio SaquemaAinda não há avaliações
- Relevância Da CronobiologiaDocumento58 páginasRelevância Da Cronobiologiahelderms3Ainda não há avaliações
- Artigo Científico - EconometriaDocumento15 páginasArtigo Científico - Econometriahelderms3Ainda não há avaliações
- 05 Relatório - Gestão Escolar e Processos EducacionaisDocumento10 páginas05 Relatório - Gestão Escolar e Processos Educacionaishelderms3Ainda não há avaliações
- 01) Relatório 01 - Gestão EscolarDocumento4 páginas01) Relatório 01 - Gestão Escolarhelderms3Ainda não há avaliações
- 06) Relatório 06 - Gestão EscolarDocumento26 páginas06) Relatório 06 - Gestão Escolarhelderms3Ainda não há avaliações
- Integrais Por Substituição TrigonométricaDocumento2 páginasIntegrais Por Substituição Trigonométricahelderms3Ainda não há avaliações
- Integrais de Potências de Funções TrigonométricasDocumento2 páginasIntegrais de Potências de Funções Trigonométricashelderms3Ainda não há avaliações
- ShabtiDocumento6 páginasShabtinicollas andrewAinda não há avaliações
- Lista de Exercícios 1 - Econometria - 2019-2Documento9 páginasLista de Exercícios 1 - Econometria - 2019-2RenanMüllerAinda não há avaliações
- Usp 111-402-1-PBDocumento11 páginasUsp 111-402-1-PBRamalho Santos de ColoAinda não há avaliações
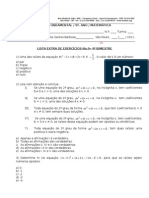
- Lista de Exercícios 9 - Matemática - 4º BimestreDocumento4 páginasLista de Exercícios 9 - Matemática - 4º BimestreLuís Felipe Peterlini75% (4)
- Como Se Há de Haver o Senhor - AntonilDocumento2 páginasComo Se Há de Haver o Senhor - AntonilPlinio LabriolaAinda não há avaliações
- Portugues 12o Resumos Importantes para o ExameDocumento35 páginasPortugues 12o Resumos Importantes para o ExameManuel SousaAinda não há avaliações
- Atividade Avaliativa 1 - Filosofia 2º AnoDocumento3 páginasAtividade Avaliativa 1 - Filosofia 2º Anojosineide.pereira.medeirosAinda não há avaliações
- 12 FP MensagemDocumento6 páginas12 FP MensagemAna Francisca MonteiroAinda não há avaliações
- Manual Do ProprietárioDocumento80 páginasManual Do ProprietárioCarla SouzaAinda não há avaliações
- Bergeret (1998) Psicologia Patolà Gica (Caps Sobre As Estruturas)Documento45 páginasBergeret (1998) Psicologia Patolà Gica (Caps Sobre As Estruturas)Daisy IvyAinda não há avaliações
- A Ideologia Do Socialismo JurídicoDocumento3 páginasA Ideologia Do Socialismo JurídicoLeonardo GuittonAinda não há avaliações
- Espaços Motores de Fluxos Mundiais (12.º)Documento10 páginasEspaços Motores de Fluxos Mundiais (12.º)profgeofernando100% (2)
- PSM 2000Documento5 páginasPSM 2000guilhermeapa799Ainda não há avaliações
- Relatório Medidas e IncertezasDocumento9 páginasRelatório Medidas e IncertezasLeonardo A. RuschAinda não há avaliações
- A Inpiração e A Autoridade Das EscriturasDocumento2 páginasA Inpiração e A Autoridade Das Escriturasapi-3861555100% (1)
- Zen Catalogo Mancais de Alternador e Motor de Partida 2019Documento118 páginasZen Catalogo Mancais de Alternador e Motor de Partida 2019LEODECIO BELO DE OLIVEIRA100% (1)
- ExercíciosDocumento52 páginasExercíciosEvani Santos100% (1)
- A Corrente Humanista e A Corrente TranspessoalDocumento49 páginasA Corrente Humanista e A Corrente TranspessoalWanderlei GCAinda não há avaliações
- Lista Resolvida de Funcao ExponencialDocumento3 páginasLista Resolvida de Funcao ExponencialsandraAinda não há avaliações
- HEPATECTOMIADocumento34 páginasHEPATECTOMIAFernando ZatAinda não há avaliações
- 24 Junho Tabela MIRAI VILA EMA - 24JUN - V01 - OkDocumento12 páginas24 Junho Tabela MIRAI VILA EMA - 24JUN - V01 - OkMagali Costa Dos PassosAinda não há avaliações
- Atividade Cultura Brasileira 1 TEXTOSDocumento1 páginaAtividade Cultura Brasileira 1 TEXTOSRafael FrancoAinda não há avaliações
- Temperabilidade Jominy e Influência Do Revenido Sobre A Dureza - Um Estudo em Aços Estruturais NacionaisDocumento115 páginasTemperabilidade Jominy e Influência Do Revenido Sobre A Dureza - Um Estudo em Aços Estruturais NacionaisEverton GustavoAinda não há avaliações
- Guia Ouvidores de VozesDocumento27 páginasGuia Ouvidores de VozesAna Paula SerranoAinda não há avaliações
- Cães & Companhia #240Documento100 páginasCães & Companhia #240João Pexirra100% (1)
- Pratica de MacrografiaDocumento11 páginasPratica de Macrografiavinicius olivera sofiaAinda não há avaliações
- O Conflito Na Organização e Instituição EscolareducativaDocumento28 páginasO Conflito Na Organização e Instituição EscolareducativaABAmadoAinda não há avaliações
- BR 09644539Documento194 páginasBR 09644539Bruno VenturaAinda não há avaliações
- Levedo de Cerveja - Benefícios e Onde Comprar em Promoção!Documento1 páginaLevedo de Cerveja - Benefícios e Onde Comprar em Promoção!L.A OliveiraAinda não há avaliações