Fazer download em pdf ou txt
Você também pode gostar
- Vigas Gerber e Quadros Planos 5.3Documento28 páginasVigas Gerber e Quadros Planos 5.3Barbara BittencourtAinda não há avaliações
- Fundamentos da Estampagem Incremental de Chapas Aplicados ao Aço AISI 304LNo EverandFundamentos da Estampagem Incremental de Chapas Aplicados ao Aço AISI 304LAinda não há avaliações
- Manual Super Flow - 110 - PTBR PDFDocumento34 páginasManual Super Flow - 110 - PTBR PDFBruno SchädellAinda não há avaliações
- Engrenagens Cilíndricas de Dentes RetosDocumento24 páginasEngrenagens Cilíndricas de Dentes RetosWilliam GiacomettiAinda não há avaliações
- Codigos CNCDocumento5 páginasCodigos CNCNicolly MartinsAinda não há avaliações
- O Processo de Automação de Um Compactador de Latinhas de AlumínioDocumento31 páginasO Processo de Automação de Um Compactador de Latinhas de AlumínioMarcia CatendeAinda não há avaliações
- FresadoraDocumento1 páginaFresadoraCecilio Díaz GijónAinda não há avaliações
- Usinagem HSMDocumento14 páginasUsinagem HSMEdmilson C. LaurindoAinda não há avaliações
- Anexo 20 (PPT) Alinhamento de MáquinasDocumento32 páginasAnexo 20 (PPT) Alinhamento de MáquinasPaulo RenatoAinda não há avaliações
- Anel GraduadoDocumento5 páginasAnel GraduadoCaio2101Ainda não há avaliações
- Apostila Metrologia DimensionalDocumento193 páginasApostila Metrologia Dimensionallucasrenck100% (1)
- Calculo de CorrentesDocumento41 páginasCalculo de CorrentesErich Wagner100% (1)
- Engaxetamento de BombaDocumento26 páginasEngaxetamento de BombaSérgio BlackAinda não há avaliações
- Cap 7 - DobramentoDocumento38 páginasCap 7 - DobramentoneralregoneAinda não há avaliações
- Metal Mecânica Itinerário SenaiDocumento1 páginaMetal Mecânica Itinerário SenaiDavid Aguiar FelicinoAinda não há avaliações
- Tabelas EngrenagemDocumento12 páginasTabelas EngrenagemEvertonAinda não há avaliações
- 05 - Moendas 000fxourdm402wyiv8018wi9tas2husfDocumento8 páginas05 - Moendas 000fxourdm402wyiv8018wi9tas2husftiago2010insAinda não há avaliações
- Tornearia Mecânica - Tecnologia AplicadaDocumento366 páginasTornearia Mecânica - Tecnologia AplicadaWagner PellimAinda não há avaliações
- 01-Introdução À FresagemDocumento26 páginas01-Introdução À FresagemRodrigo ManoelAinda não há avaliações
- Catalogo WCG20 ConimaxDocumento80 páginasCatalogo WCG20 ConimaxAnonymous 0H1z4LT0F100% (1)
- Hidráulica e Pneumática (Apresentação Padrão)Documento241 páginasHidráulica e Pneumática (Apresentação Padrão)Gera BarbosaAinda não há avaliações
- Faria 2009 PDFDocumento110 páginasFaria 2009 PDFAntonio GimenesAinda não há avaliações
- Compressores 1Documento11 páginasCompressores 1AricorrerAinda não há avaliações
- Trabalho PlainaDocumento49 páginasTrabalho PlainaHenry HcAinda não há avaliações
- Usinagem - Aula 6Documento89 páginasUsinagem - Aula 6Cris NunesAinda não há avaliações
- 03-Polias e Correias, Mancais TEC. MACDocumento60 páginas03-Polias e Correias, Mancais TEC. MACMarcio Araujo CostaAinda não há avaliações
- Como Desenhar Uma Engrenagem No Autocad 2016Documento14 páginasComo Desenhar Uma Engrenagem No Autocad 2016Alexandre BorgesAinda não há avaliações
- Aula - 09 - Buchas e Guias - InternetDocumento36 páginasAula - 09 - Buchas e Guias - InternetrafaelcsehnAinda não há avaliações
- Apostila CNCDocumento132 páginasApostila CNCferramentaria.ipel100% (1)
- 00 - Fundamentos Da Lubrificação Aula 05 e 06a PDFDocumento54 páginas00 - Fundamentos Da Lubrificação Aula 05 e 06a PDFFabiano GreinAinda não há avaliações
- Manufatura MecânicaDocumento77 páginasManufatura MecânicaFernanda SilveiraAinda não há avaliações
- Classificação Das BombasDocumento20 páginasClassificação Das BombasAlexandre Alcides Lifanico100% (1)
- Aula 2 - Fundamentos de MecânicaDocumento49 páginasAula 2 - Fundamentos de MecânicaVinícius Wittig ViannaAinda não há avaliações
- LUBRIFICAÇÃO Slides AULA 01Documento86 páginasLUBRIFICAÇÃO Slides AULA 01winstontecnico100% (1)
- Relatório-Usinagem 2018Documento13 páginasRelatório-Usinagem 2018Pedro JúniorAinda não há avaliações
- CypCut Laser Cutting Control System User Manual V6.2.5Documento55 páginasCypCut Laser Cutting Control System User Manual V6.2.5EloiAinda não há avaliações
- Manutenção de Compressores - Apostila 2Documento33 páginasManutenção de Compressores - Apostila 2wagnerAinda não há avaliações
- Manual Ansimag KM1515Documento26 páginasManual Ansimag KM1515Felipe MachadoAinda não há avaliações
- Apostila de Fresagem-EniacDocumento18 páginasApostila de Fresagem-EniacilledratAinda não há avaliações
- Modelagem Analítica de Sistemas Eléctrico-MecânicosDocumento16 páginasModelagem Analítica de Sistemas Eléctrico-Mecânicosbeto alequeAinda não há avaliações
- Artigo UsinagemDocumento8 páginasArtigo UsinagemRenan Coswosk da SilvaAinda não há avaliações
- Programação Fanuc 21TDocumento34 páginasProgramação Fanuc 21TFilhaoPiresAinda não há avaliações
- 05 FuraçãoDocumento24 páginas05 FuraçãoRodrigo ManoelAinda não há avaliações
- Alinhamento Á LaserDocumento26 páginasAlinhamento Á Lasermlbpreditiva100% (1)
- Manual Fluidsim PDocumento49 páginasManual Fluidsim P200607807Ainda não há avaliações
- CNC (Teste Diagnóstico)Documento11 páginasCNC (Teste Diagnóstico)cjjesusAinda não há avaliações
- Relatorio Do Projeto Do Redutor FinalDocumento28 páginasRelatorio Do Projeto Do Redutor FinalRafael Fernando Prestes50% (2)
- Parafusos Do MateusDocumento21 páginasParafusos Do MateusMatheus SalesAinda não há avaliações
- 3 - Tecnologia Na RetificacaoDocumento20 páginas3 - Tecnologia Na RetificacaoFernando DarsonoAinda não há avaliações
- Bener Catalogo Geral Veker 2019 XDocumento8 páginasBener Catalogo Geral Veker 2019 XCristiano MotaAinda não há avaliações
- Exercicio 1 - Aula 11 PDFDocumento29 páginasExercicio 1 - Aula 11 PDFAndelson nascimento100% (1)
- Manual Simulador EngrenagensDocumento11 páginasManual Simulador EngrenagensPaulo Ricardo AlvesAinda não há avaliações
- Power Point Fresadora OkDocumento35 páginasPower Point Fresadora OkRicardo Almeida100% (1)
- Questões de Revisão de UsinagemDocumento1 páginaQuestões de Revisão de UsinagemDKBonecoAinda não há avaliações
- FerrografiaDocumento20 páginasFerrografiaFábio RibeiroAinda não há avaliações
- Tratamento Criogênico: Warfighter Lethality, Suas medalhas militares estão em risco?No EverandTratamento Criogênico: Warfighter Lethality, Suas medalhas militares estão em risco?Ainda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- N-2314 - US em FundidoDocumento21 páginasN-2314 - US em FundidoLEONARDOUS7Ainda não há avaliações
- Phased ArrayDocumento32 páginasPhased ArrayLEONARDOUS7Ainda não há avaliações
- Método de Focalização Total (TFM)Documento4 páginasMétodo de Focalização Total (TFM)LEONARDOUS7Ainda não há avaliações
- US Solda Longitudinal de TuboDocumento6 páginasUS Solda Longitudinal de TuboLEONARDOUS7Ainda não há avaliações
- Ângulos de Inspeção Ultrassônica em Superfícies Curvas - Holloway NDT e EngenhariaDocumento12 páginasÂngulos de Inspeção Ultrassônica em Superfícies Curvas - Holloway NDT e EngenhariaLEONARDOUS7Ainda não há avaliações
- Tolerancia Geometrica NBR 6409Documento41 páginasTolerancia Geometrica NBR 6409LEONARDOUS7Ainda não há avaliações
- 4 - Imperfeicoes CristalinasDocumento70 páginas4 - Imperfeicoes CristalinasLuigi FerioliAinda não há avaliações
- ISO 9000 - Seminário CompletoDocumento102 páginasISO 9000 - Seminário CompletoPatricia Miranda HochholdAinda não há avaliações
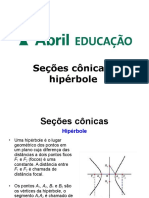
- Seções Cônicas: HipérboleDocumento12 páginasSeções Cônicas: HipérboleJosé Carlos Corrêa JuniorAinda não há avaliações
- Tutorial Teste Rele Schneider P343 Falta A Terra No Estator 100 Porcento CTCDocumento49 páginasTutorial Teste Rele Schneider P343 Falta A Terra No Estator 100 Porcento CTCErick CostaAinda não há avaliações
- Abiogênese X BiogêneseDocumento28 páginasAbiogênese X BiogêneseMarcia MouraAinda não há avaliações
- Mapeamento de Áreas de Risco A Inundações Com ImagensDocumento17 páginasMapeamento de Áreas de Risco A Inundações Com ImagensISABELA CRISTINA RIBEIRO SOUZAAinda não há avaliações
- Manejo Fitossanitário Integrado Na Cultura Da Soja Uma Solução SustentávelDocumento38 páginasManejo Fitossanitário Integrado Na Cultura Da Soja Uma Solução Sustentávelmarcelo jaraAinda não há avaliações
- Tipos de Parafusos TransportadoresDocumento11 páginasTipos de Parafusos TransportadoresdesetekAinda não há avaliações
- Heber Carlos de Campos EU SOU IIDocumento255 páginasHeber Carlos de Campos EU SOU IIEderson Souza Navarro100% (5)
- Léxico Do Drama Moderno e Contemporâneo - SarrazacDocumento29 páginasLéxico Do Drama Moderno e Contemporâneo - SarrazacMatheusCosmo100% (1)
- Caderno 2007Documento12 páginasCaderno 2007eduardo.espaconamaste9676Ainda não há avaliações
- Estudo Dirigido 1 FenomenologiaDocumento6 páginasEstudo Dirigido 1 FenomenologiaSueli Vilela100% (1)
- Analítica - Relatório Padronização Do KMnO4Documento10 páginasAnalítica - Relatório Padronização Do KMnO4Maria ValentinAinda não há avaliações
- Xire OrixasDocumento16 páginasXire Orixasgiovane.linsAinda não há avaliações
- Casas Típicas de PortugalDocumento10 páginasCasas Típicas de PortugalJoana ValenteAinda não há avaliações
- Guaratingueta Maria Joaquina Fazendeira de Café No Vale Do ParaibaDocumento136 páginasGuaratingueta Maria Joaquina Fazendeira de Café No Vale Do ParaibaCPSSTAinda não há avaliações
- Módulos Digitais Compact 5000 I/O: Manual Do UsuárioDocumento294 páginasMódulos Digitais Compact 5000 I/O: Manual Do Usuáriomauricio pachecoAinda não há avaliações
- 17-09 GeoDocumento2 páginas17-09 GeoFLAVIA NEVES DE OLIVEIRAAinda não há avaliações
- Execução de Serviços Técnicos ComerciaisDocumento92 páginasExecução de Serviços Técnicos Comerciaissimof24244100% (1)
- Treinamento FANUCDocumento21 páginasTreinamento FANUCasrRG100% (1)
- Monografia - PregagensDocumento9 páginasMonografia - PregagenspequichoAinda não há avaliações
- Prova de Inspetor de Soldagem Nivel 1Documento14 páginasProva de Inspetor de Soldagem Nivel 1Nicolas Fontes100% (1)
- Pré-Banca - AnacDocumento10 páginasPré-Banca - Anacrfwt8q7ng9Ainda não há avaliações
- Vida Com PropósitoDocumento15 páginasVida Com PropósitoEliana Sabatini Marques FerreiraAinda não há avaliações
- Modelo Resultado Completo GOPC Orientação ProfissionalDocumento8 páginasModelo Resultado Completo GOPC Orientação ProfissionalpsicologajheniferstorckAinda não há avaliações
- Maria Isabela Gonçalves SilvaDocumento27 páginasMaria Isabela Gonçalves SilvaMonica Rodrigues PpkAinda não há avaliações
- Fraternidade Branca - CronologiaDocumento25 páginasFraternidade Branca - CronologiaTiago Guardia100% (5)
- BuscaRealidadeExperiencia Silva 2007Documento281 páginasBuscaRealidadeExperiencia Silva 2007Eloi MagalhãesAinda não há avaliações
- Resumo Executivo - GD1 (LAVRAS)Documento67 páginasResumo Executivo - GD1 (LAVRAS)wallison.santosAinda não há avaliações
- Calor de NeutralizaçãoDocumento5 páginasCalor de NeutralizaçãoGuilherme MirandaAinda não há avaliações