Você também pode gostar
- Exame Normal - CP. 2021 - CDocumento6 páginasExame Normal - CP. 2021 - CLuís SalvadorAinda não há avaliações
- Lista 4Documento2 páginasLista 4Pedro MartinsAinda não há avaliações
- Ativ 1práticadeensinoDocumento2 páginasAtiv 1práticadeensinoNana LeiteAinda não há avaliações
- Lista Controle IIDocumento4 páginasLista Controle IIVinicius JesusAinda não há avaliações
- AnSinais T3 4Documento9 páginasAnSinais T3 4G0tBlackOpsAinda não há avaliações
- CALCULO III LISTA EXERCICIOS 5 (Transformada de Laplace) 20181 PDFDocumento3 páginasCALCULO III LISTA EXERCICIOS 5 (Transformada de Laplace) 20181 PDFCaio Felipe CarvalhoAinda não há avaliações
- Trabalho MateusDocumento4 páginasTrabalho Mateusmateus santosAinda não há avaliações
- Lista 1 SedoDocumento3 páginasLista 1 SedoIzabel FerreiraAinda não há avaliações
- Identificando Cônicas Rotacionadas e Transladadas No Plano.Documento2 páginasIdentificando Cônicas Rotacionadas e Transladadas No Plano.felipe31415Ainda não há avaliações
- Proyecto Final InstrumentacionDocumento4 páginasProyecto Final InstrumentacionHENRY CARVAJAL RAMIREZAinda não há avaliações
- AnMat2 1112ExercCad1Documento15 páginasAnMat2 1112ExercCad1Carolina RibeiroAinda não há avaliações
- Aula P05Documento30 páginasAula P05Sofia InacioAinda não há avaliações
- Lista 01 - UeceDocumento8 páginasLista 01 - UeceRomero VieiraAinda não há avaliações
- Universidade de Aveiro Departamento de Matem Atica: T 2t 3t T 10 2 2 (T 2) 2 1Documento2 páginasUniversidade de Aveiro Departamento de Matem Atica: T 2t 3t T 10 2 2 (T 2) 2 1Rita AlmeidaAinda não há avaliações
- Matemática PPT - Exercícios ResolvidosDocumento12 páginasMatemática PPT - Exercícios ResolvidosMatemática PPT86% (7)
- Lista de Revisão - AV2 - 1º Trimestre - 7º AnoDocumento6 páginasLista de Revisão - AV2 - 1º Trimestre - 7º AnoX Da QuestãoAinda não há avaliações
- Funções Quadráticas Elon LagesDocumento11 páginasFunções Quadráticas Elon Lagesanon-390920100% (1)
- Atividade 3Documento14 páginasAtividade 3joao vitor Oliveira100% (1)
- Apostila Revisão FinalDocumento54 páginasApostila Revisão FinalKaiky CardosoAinda não há avaliações
- 2a Lista de Exercicios ESTA004Documento4 páginas2a Lista de Exercicios ESTA004Marcelo Pedro100% (1)
- Ficha de Trabalho 02 - 12.º Ano ResoluçãoDocumento2 páginasFicha de Trabalho 02 - 12.º Ano ResoluçãoTiago FerreiraAinda não há avaliações
- Superfícies Geradas A Partir de Quatérnions.Documento12 páginasSuperfícies Geradas A Partir de Quatérnions.Emanuel BissiattiAinda não há avaliações
- Af2 16en CorDocumento3 páginasAf2 16en CorContaAinda não há avaliações
- Parte2 RespostaFrequencia ExerciciosDocumento2 páginasParte2 RespostaFrequencia ExerciciosFrancisco RodriguesAinda não há avaliações
- SS P8 Ess EstabDocumento8 páginasSS P8 Ess EstabRafael Fréz100% (1)
- Desafio 1Documento10 páginasDesafio 1Amanda Vieira Gomes ScandelaiAinda não há avaliações
- Aula Teo12-Exemplos v2Documento28 páginasAula Teo12-Exemplos v2G0tBlackOpsAinda não há avaliações
- Aula 05Documento8 páginasAula 05Andressa FernandesAinda não há avaliações
- MCVV2 U2 A2 HegmDocumento3 páginasMCVV2 U2 A2 HegmHector Guevara MosquedaAinda não há avaliações
- R Lista1Documento1 páginaR Lista1Tiago Rodrigues MendonçaAinda não há avaliações
- Ef11 Ficha Preparacao Exame Resolucao PDFDocumento21 páginasEf11 Ficha Preparacao Exame Resolucao PDFrita100% (1)
- Exercícios de Barrasv1 PDFDocumento58 páginasExercícios de Barrasv1 PDFMalcolm AntonioAinda não há avaliações
- APOL02 C.C. - Questoes 01a05Documento5 páginasAPOL02 C.C. - Questoes 01a05Sebastião GoisAinda não há avaliações
- Apol02 C.C. - Questoes 01a10Documento10 páginasApol02 C.C. - Questoes 01a10Sebastião GoisAinda não há avaliações
- TC 2Documento5 páginasTC 2Robério BacelarAinda não há avaliações
- Solucao de Exercicios Selecionados LivroDocumento30 páginasSolucao de Exercicios Selecionados LivroSilvio JesusAinda não há avaliações
- Tarefa 4 - Transformada de La PlaceDocumento2 páginasTarefa 4 - Transformada de La PlacemariaeduardabatudAinda não há avaliações
- TC Trigonometria 2021 1ano FBDocumento3 páginasTC Trigonometria 2021 1ano FBCabelo DouradoAinda não há avaliações
- TC Trigonometria 2021 1ano FBDocumento3 páginasTC Trigonometria 2021 1ano FBCabelo DouradoAinda não há avaliações
- AletaDocumento25 páginasAletaLuiz Otavio PereiraAinda não há avaliações
- 2-Modelagem de Sistemas DiscretosDocumento40 páginas2-Modelagem de Sistemas DiscretosPedro Jorge Vilela AlheirosAinda não há avaliações
- Teste1 v2 CorDocumento3 páginasTeste1 v2 CorBoaventura MaxlhopeAinda não há avaliações
- Trigonometria (2) - 23.24Documento2 páginasTrigonometria (2) - 23.24tomba.ooo.mnhuAinda não há avaliações
- Colégio Pedro Ii - Humaitá Ii Departamento de MatemáticaDocumento4 páginasColégio Pedro Ii - Humaitá Ii Departamento de MatemáticaKaely AugustoAinda não há avaliações
- EM707 Lista 02 2s 2021Documento3 páginasEM707 Lista 02 2s 2021Roger LeiteAinda não há avaliações
- PROVA OBJETIVA CircuitosDocumento13 páginasPROVA OBJETIVA CircuitosGeraldo Batista de Oliveira100% (1)
- Trigonometria (1) 21.22Documento2 páginasTrigonometria (1) 21.22Beatriz CruzAinda não há avaliações
- Matemática - Geometria - Ficha de Trabalho Nº 4 - Conjuntos de Pontos e Condições Distância Entre Dois Pontos Mediatriz de Um SegmentoDocumento6 páginasMatemática - Geometria - Ficha de Trabalho Nº 4 - Conjuntos de Pontos e Condições Distância Entre Dois Pontos Mediatriz de Um SegmentoGeometria Ensino Médio100% (6)
- Elc418 Exer 5Documento15 páginasElc418 Exer 5Raquel Bezerra SAinda não há avaliações
- Transformadas de Laplace - Exercícios PDFDocumento2 páginasTransformadas de Laplace - Exercícios PDFDouglas SilvaAinda não há avaliações
- Aula 5 - Sistemas Com N GDLDocumento19 páginasAula 5 - Sistemas Com N GDLslipcoutAinda não há avaliações
- Gabarito AFA2014 Comentadas PDFDocumento53 páginasGabarito AFA2014 Comentadas PDFkartegiane5verasAinda não há avaliações
- Solucao T3Documento2 páginasSolucao T3Marcello HenriqueAinda não há avaliações
- Matematica Ita ModificadaDocumento19 páginasMatematica Ita ModificadaNeisser Arturo Soto FernándezAinda não há avaliações
- ms211 p2 2012s1 Sussner ResDocumento9 páginasms211 p2 2012s1 Sussner ResVictória HellenaAinda não há avaliações
- Lista 2 SedoDocumento4 páginasLista 2 SedoIzabel FerreiraAinda não há avaliações
- Notas de MonitoriaDocumento14 páginasNotas de MonitoriaJosé Nilson Coelho de SousaAinda não há avaliações
- Controle Avançado Aula 22Documento7 páginasControle Avançado Aula 22JeffersonAinda não há avaliações
- Gabarito Prova 3Documento4 páginasGabarito Prova 3Felipe TavaresAinda não há avaliações
- 201402beaconportuguesebrazil 1Documento1 página201402beaconportuguesebrazil 1Coutinho TSTAinda não há avaliações
- Segurança OcupacionalDocumento1 páginaSegurança OcupacionalAlex Sandro FerreiraAinda não há avaliações
- Riscos de ProcessoDocumento1 páginaRiscos de ProcessoAlex Sandro FerreiraAinda não há avaliações
- Dicas Do Protegildo: SETEMBRO / 2012Documento1 páginaDicas Do Protegildo: SETEMBRO / 2012Alex Sandro FerreiraAinda não há avaliações
- Produto Químico ErradoDocumento1 páginaProduto Químico ErradoAlex Sandro FerreiraAinda não há avaliações
- Sinais ConfusosDocumento1 páginaSinais ConfusosAlex Sandro FerreiraAinda não há avaliações
- Hidrante InoperávelDocumento1 páginaHidrante InoperávelAlex Sandro FerreiraAinda não há avaliações
- Indicadores Seguranaça ProcessoDocumento1 páginaIndicadores Seguranaça ProcessoAlex Sandro FerreiraAinda não há avaliações
- Pequenos Detalhes Comprometem SegurnaçaDocumento1 páginaPequenos Detalhes Comprometem SegurnaçaAlex Sandro FerreiraAinda não há avaliações
- Neste DDS Vamos Conversar Sobre A Classificação de PerigosDocumento4 páginasNeste DDS Vamos Conversar Sobre A Classificação de PerigosAlex Sandro FerreiraAinda não há avaliações
- Operações em FeriadosDocumento1 páginaOperações em FeriadosAlex Sandro FerreiraAinda não há avaliações
- EXERCÍCIOS DE FT Trabalho de Eixo e PotênciaDocumento1 páginaEXERCÍCIOS DE FT Trabalho de Eixo e PotênciaAlex Sandro FerreiraAinda não há avaliações
- Fire-proofing-Proteção Contra Incendio EstruturasDocumento1 páginaFire-proofing-Proteção Contra Incendio EstruturasAlex Sandro FerreiraAinda não há avaliações
- IluminadosDocumento1 páginaIluminadosAlex Sandro FerreiraAinda não há avaliações
- Lista 02 de Exercicios de FTDocumento2 páginasLista 02 de Exercicios de FTAlex Sandro FerreiraAinda não há avaliações
- Explosão GLPDocumento1 páginaExplosão GLPAlex Sandro FerreiraAinda não há avaliações
- Equipamentos Elétricos em Área PerigosalDocumento1 páginaEquipamentos Elétricos em Área PerigosalAlex Sandro FerreiraAinda não há avaliações
- Lista de Exercícios de Perda de Carga em TubulaçõesDocumento6 páginasLista de Exercícios de Perda de Carga em TubulaçõesAlex Sandro FerreiraAinda não há avaliações
- Tabelas Dimensionamento de TubulacoesDocumento7 páginasTabelas Dimensionamento de TubulacoesAlex Sandro FerreiraAinda não há avaliações
- Corrosão Sob IsolamentoDocumento1 páginaCorrosão Sob IsolamentoAlex Sandro FerreiraAinda não há avaliações
- Exercícios Do Livro Fundamentos de Fenômenos de Transporte Celso PDocumento3 páginasExercícios Do Livro Fundamentos de Fenômenos de Transporte Celso PAlex Sandro FerreiraAinda não há avaliações
- Lista 01 Detestes de FTDocumento1 páginaLista 01 Detestes de FTAlex Sandro FerreiraAinda não há avaliações
- Conhecimentos Básicos Língua PortuguesaDocumento3 páginasConhecimentos Básicos Língua PortuguesaAtaniel CampeloAinda não há avaliações
- Lista 03 de Exercicios de FTDocumento1 páginaLista 03 de Exercicios de FTAlex Sandro FerreiraAinda não há avaliações
- Ana Luiza Costa FGV CpdocDocumento107 páginasAna Luiza Costa FGV CpdoccorreiojmAinda não há avaliações
- N.T. Revista Literaria em Traducao N 4 PDFDocumento266 páginasN.T. Revista Literaria em Traducao N 4 PDForg22559Ainda não há avaliações
- Dimensionamento de Vigas de Concreto Armado À TorçãoDocumento16 páginasDimensionamento de Vigas de Concreto Armado À TorçãoCezar DantasAinda não há avaliações
- Poligonos SemelhantesDocumento4 páginasPoligonos SemelhantespcmcamposAinda não há avaliações
- Faltas - Quadro ResumoDocumento4 páginasFaltas - Quadro ResumoAnonymous a39FXdueJoAinda não há avaliações
- 1 Astrologia e PsicologiaDocumento33 páginas1 Astrologia e PsicologiaCristina GameiroAinda não há avaliações
- Musculação Do Iniciante Ao Avançado PDFDocumento20 páginasMusculação Do Iniciante Ao Avançado PDFTiago FerreiraAinda não há avaliações
- Edital de Participação - 7 RetificaçãoDocumento1 páginaEdital de Participação - 7 RetificaçãoAna Lívia MoreiraAinda não há avaliações
- Certificado Amostra Ipiranga F1 Master SAE 5W30 API SN - TestemuDocumento2 páginasCertificado Amostra Ipiranga F1 Master SAE 5W30 API SN - TestemuMichael CabralAinda não há avaliações
- Catálogo de Produtos Skil 2016Documento72 páginasCatálogo de Produtos Skil 2016Wellington BonessAinda não há avaliações
- Aula+5+ +Transtorno+Da+Personalidade+BorderlineDocumento9 páginasAula+5+ +Transtorno+Da+Personalidade+BorderlineFERNANDAAinda não há avaliações
- Aula - Introdução À Educação Do CampoDocumento13 páginasAula - Introdução À Educação Do CampoAstrogildo de FrançaAinda não há avaliações
- Estatística ResumoDocumento23 páginasEstatística Resumotrying to draw things100% (1)
- Dissertação Isadora de AlbuquerqueDocumento43 páginasDissertação Isadora de AlbuquerqueIvyAinda não há avaliações
- Linguagem para Psicologia SocialDocumento11 páginasLinguagem para Psicologia SocialpamAinda não há avaliações
- Filosofos ContratualistasDocumento2 páginasFilosofos Contratualistasricardoprimo456Ainda não há avaliações
- Vigiar e PunirDocumento2 páginasVigiar e PunirFabportoAinda não há avaliações
- Microsoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILDocumento23 páginasMicrosoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILcelio soaresAinda não há avaliações
- ANTEPROJETODocumento12 páginasANTEPROJETOAfonso SalumbomboAinda não há avaliações
- Freud Uma Vida para o Nosso Tempo Traduzido Peter GayDocumento3.658 páginasFreud Uma Vida para o Nosso Tempo Traduzido Peter GayC4io990% (1)
- Manual Fechadura HDL C-90Documento1 páginaManual Fechadura HDL C-90Adriano Gomes100% (1)
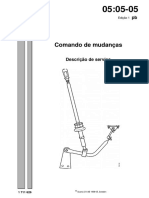
- Alavanca CambioDocumento52 páginasAlavanca CambioPauloFeitoza100% (1)
- Conceito Da Teoria de Motivacao de MaslowDocumento4 páginasConceito Da Teoria de Motivacao de MaslowAntonio LimaAinda não há avaliações
- Esto QueDocumento65 páginasEsto QueSeba CamposAinda não há avaliações
- A Divina ProporçãoDocumento4 páginasA Divina ProporçãoEduardo ValeiroAinda não há avaliações
- Raciocínio Lógico Matemático Sentencial CESPE-UnB PDFDocumento11 páginasRaciocínio Lógico Matemático Sentencial CESPE-UnB PDFErick MouraAinda não há avaliações
- Caso Clínico SAEDocumento7 páginasCaso Clínico SAEValdir GomesAinda não há avaliações
- Baixar Livro de Filosofia 11a ClasseDocumento49 páginasBaixar Livro de Filosofia 11a ClasseJamila IbrahimoAinda não há avaliações
- Introduçao - Dinâmica Das EstruturasDocumento50 páginasIntroduçao - Dinâmica Das EstruturasBárbara CamposAinda não há avaliações
- SQLITEDocumento2 páginasSQLITEKenned JrAinda não há avaliações