Você também pode gostar
- Instrumentacao Livro 2Documento45 páginasInstrumentacao Livro 2Michel De Mattos FernandesAinda não há avaliações
- 1 FormalismosDocumento48 páginas1 FormalismosPedro LimaAinda não há avaliações
- 500 1434 1 PBDocumento15 páginas500 1434 1 PBWESLEY GERALDO SAMPAIO DA NOBREGAAinda não há avaliações
- Aula 08 - PCC - Arquitetura Dis Sistemas de ControleDocumento36 páginasAula 08 - PCC - Arquitetura Dis Sistemas de ControlethaysAinda não há avaliações
- S-PAA - Conceito e DefiniçãoDocumento8 páginasS-PAA - Conceito e Definiçãocmo.brunoAinda não há avaliações
- Controle de GolfadasDocumento6 páginasControle de GolfadasLuiz TorresAinda não há avaliações
- Controle de Processos Industriais: Modelagem e Simulação com ScilabNo EverandControle de Processos Industriais: Modelagem e Simulação com ScilabNota: 5 de 5 estrelas5/5 (1)
- Kalven Somativa 4 ProjetosDocumento19 páginasKalven Somativa 4 ProjetosKalvenAinda não há avaliações
- Apostila de CLP EtpcDocumento26 páginasApostila de CLP EtpcPedro Vasconcelos100% (1)
- Instrumentacao Livro 3Documento43 páginasInstrumentacao Livro 3Aline CastroAinda não há avaliações
- Lista AutomaçãoDocumento61 páginasLista AutomaçãoHiago bragaAinda não há avaliações
- Lista PROJETOS DE CIRCUITOS DE CONTROLEDocumento4 páginasLista PROJETOS DE CIRCUITOS DE CONTROLEthaysAinda não há avaliações
- Lista Cpu (Atividades)Documento7 páginasLista Cpu (Atividades)Vinicius SantiagoAinda não há avaliações
- Perguntas TeoricasDocumento7 páginasPerguntas TeoricasJoão CavadasAinda não há avaliações
- Sintonia Cautelosa de Controladores Pi para Plantas de Primeira Ordem Com Tempo Morto e Não LinearidadesDocumento16 páginasSintonia Cautelosa de Controladores Pi para Plantas de Primeira Ordem Com Tempo Morto e Não Linearidadesr282269zcAinda não há avaliações
- Questionamentos Respostas Choke ManifoldDocumento4 páginasQuestionamentos Respostas Choke ManifoldLarissa MarquiAinda não há avaliações
- Controle PID Com Aproximação Digital para Utilização No PIC - O Blog Do MarceloDocumento8 páginasControle PID Com Aproximação Digital para Utilização No PIC - O Blog Do MarceloGuilherme FerracinoAinda não há avaliações
- 8 - Relatorio 1 - RetroalimentacaoDocumento11 páginas8 - Relatorio 1 - RetroalimentacaoLucas SilvaAinda não há avaliações
- Apostila - CLP - LadderDocumento30 páginasApostila - CLP - Ladderwillianamigo189667% (3)
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Documento22 páginasModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- Experiência de Boyle-MariotteDocumento23 páginasExperiência de Boyle-MariotteAndré B. CunhaAinda não há avaliações
- Resolução Das Questões de AutomaçãoDocumento3 páginasResolução Das Questões de Automaçãojos luiz100% (1)
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- SC1 AtividadeProjetoDocumento10 páginasSC1 AtividadeProjetoDayanaAinda não há avaliações
- Simulador de Processos Industriais paraDocumento14 páginasSimulador de Processos Industriais paraAdelmoKarigAinda não há avaliações
- Aula - Cap6 - v221101 - Controle MF - Parte 1 - Controle PDocumento81 páginasAula - Cap6 - v221101 - Controle MF - Parte 1 - Controle Prenatoalex.17Ainda não há avaliações
- Automacao EsojeDocumento5 páginasAutomacao EsojeNaomy MelloAinda não há avaliações
- Resumo Cap 1 (Ivo Leoni)Documento6 páginasResumo Cap 1 (Ivo Leoni)Ivo LeoniAinda não há avaliações
- Prova - Processos IndustriaisDocumento3 páginasProva - Processos IndustriaisAmanda SantosAinda não há avaliações
- Apostila Automação IndustrialDocumento73 páginasApostila Automação IndustrialCristiano99% (193)
- Rascunho Trabalho DroneDocumento10 páginasRascunho Trabalho DronePablo HenriqueAinda não há avaliações
- Pid ElevadorDocumento14 páginasPid ElevadorGilbert CarazaAinda não há avaliações
- 01 C1 IntroduccionDocumento11 páginas01 C1 IntroduccionGildo MatiasAinda não há avaliações
- Estruturacao Norma IEC 61131 - 3Documento6 páginasEstruturacao Norma IEC 61131 - 3Emerson Eduardo RodriguesAinda não há avaliações
- Simulador Labview (PID)Documento10 páginasSimulador Labview (PID)marcoslemos1000Ainda não há avaliações
- Simulado - 1 - InstrumentaçãoDocumento3 páginasSimulado - 1 - InstrumentaçãoLuiz CésarAinda não há avaliações
- DEsEnvolvimEnTo DE Um Micro sisTEma Supervisório PDFDocumento17 páginasDEsEnvolvimEnTo DE Um Micro sisTEma Supervisório PDFOtaviov8Ainda não há avaliações
- 2034 - Apontamentos Programação e Algoritmia (Parte 1) - Engº Carlos MoraDocumento33 páginas2034 - Apontamentos Programação e Algoritmia (Parte 1) - Engº Carlos MoraLuís PerdigãoAinda não há avaliações
- Leitura e Interpretação de Projetos 2Documento17 páginasLeitura e Interpretação de Projetos 2Danielly G. JudicialAinda não há avaliações
- Respostas Do LivroDocumento13 páginasRespostas Do Livrojuninhu1919Ainda não há avaliações
- O PID Fracionário: Uma Aplicação Prática e Real em Uma Planta-Piloto de Vazão IndustrialNo EverandO PID Fracionário: Uma Aplicação Prática e Real em Uma Planta-Piloto de Vazão IndustrialAinda não há avaliações
- Sistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesNo EverandSistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesAinda não há avaliações
- Sintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPNo EverandSintonia Automática de Controlador PID: método de resposta ao degrau e implementação em CLPAinda não há avaliações
- Apresentando No Display Tm1638 A Medição De Glp Programado No ArduinoNo EverandApresentando No Display Tm1638 A Medição De Glp Programado No ArduinoAinda não há avaliações
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicAinda não há avaliações
- Lendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoNo EverandLendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm8s Programado No ArduinoAinda não há avaliações
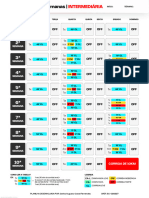
- Corrida 10KM - 10 Semanas - Nível IntermediárioDocumento1 páginaCorrida 10KM - 10 Semanas - Nível Intermediáriojackson gabrielAinda não há avaliações
- Resumo Argila Medicinal Hilton ClaudinoDocumento2 páginasResumo Argila Medicinal Hilton ClaudinoIlza Fernanda Barboza DuarteAinda não há avaliações
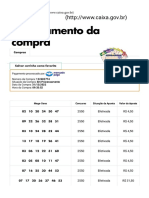
- Aposte Online Na Mega-SenaDocumento2 páginasAposte Online Na Mega-SenaWilliam Ricardo RosaAinda não há avaliações
- EvaporadorDocumento6 páginasEvaporadorWilliam Ricardo RosaAinda não há avaliações
- Predicting Octane Number Using Nuclear Magnetic ResonanceDocumento21 páginasPredicting Octane Number Using Nuclear Magnetic ResonanceWilliam Ricardo RosaAinda não há avaliações
- Elfghi - 2016 - A Hybrid Statistical Approach For Modeling and OptDocumento9 páginasElfghi - 2016 - A Hybrid Statistical Approach For Modeling and OptWilliam Ricardo RosaAinda não há avaliações
- Determination of Vapour Pressure of Gasoline by Double ANN Algorithm Combined With Multidimensional Gas ChromatographyDocumento3 páginasDetermination of Vapour Pressure of Gasoline by Double ANN Algorithm Combined With Multidimensional Gas ChromatographyWilliam Ricardo RosaAinda não há avaliações
- A Novel Control Method Combining Multi-Level Dimension Reduction and NSGA-II For Octane NumberDocumento6 páginasA Novel Control Method Combining Multi-Level Dimension Reduction and NSGA-II For Octane NumberWilliam Ricardo RosaAinda não há avaliações
- Aplicação de Redes Neurais Artificiais Com TemperaturaDocumento3 páginasAplicação de Redes Neurais Artificiais Com TemperaturaWilliam Ricardo RosaAinda não há avaliações
- Determinação Do Teor de Etanol em PostosDocumento10 páginasDeterminação Do Teor de Etanol em PostosWilliam Ricardo RosaAinda não há avaliações
- Redes Neurais AplicadasDocumento82 páginasRedes Neurais AplicadasWilliam Ricardo RosaAinda não há avaliações
- Descubra Como Instalar Sensor de EstacionamentoDocumento5 páginasDescubra Como Instalar Sensor de EstacionamentoCezar MachadoAinda não há avaliações
- Aplicacionais para Ciências e Engenharia TP2: Universidade de AveiroDocumento33 páginasAplicacionais para Ciências e Engenharia TP2: Universidade de AveiroJoaquim ParadinhaAinda não há avaliações
- 1.2 Lista de Exercícios Com GabaritoDocumento3 páginas1.2 Lista de Exercícios Com GabaritoYuri BispoAinda não há avaliações
- F.0023.09 - Modelo de Plano de Ação Corretiva - PacDocumento4 páginasF.0023.09 - Modelo de Plano de Ação Corretiva - PacSatya Franquilin Dos SantosAinda não há avaliações
- UFCD 608 - Tecnicas de MarketingDocumento16 páginasUFCD 608 - Tecnicas de MarketingJoana BorieAinda não há avaliações
- MEMÓRIA DE CÁLCULO Ponte RolanteDocumento12 páginasMEMÓRIA DE CÁLCULO Ponte RolanteBruno Guedes0% (1)
- Manual de Uso Do Tablet ISCEDDocumento72 páginasManual de Uso Do Tablet ISCEDP Orriba Jessy CleuAinda não há avaliações
- Relatório Liquidez e PlasticidadeDocumento8 páginasRelatório Liquidez e PlasticidadeVitória LimaAinda não há avaliações
- Rocketseat Explorer - Nível 01Documento4 páginasRocketseat Explorer - Nível 01naturally videosAinda não há avaliações
- Apostila Sigmatron - FordDocumento44 páginasApostila Sigmatron - FordArg Dosmil100% (2)
- Aula 10 - Calibração de PosicionadorDocumento14 páginasAula 10 - Calibração de PosicionadorRafael Porcelles BonilhaAinda não há avaliações
- Coagril 2010 PulvDocumento78 páginasCoagril 2010 PulvEduardo Portezan PimentelAinda não há avaliações
- A Importncia Da Escrita Atividade Produo Textual 22.07.2022Documento2 páginasA Importncia Da Escrita Atividade Produo Textual 22.07.2022JONATHA BERNARDOAinda não há avaliações
- Gefip SefipDocumento25 páginasGefip SefipDemetrius ViniciusAinda não há avaliações
- Segunda Via Fatura 164008561502Documento3 páginasSegunda Via Fatura 164008561502Vitor PatrickAinda não há avaliações
- Circuito de Formação de Excel Básico - Avancado PDFDocumento2 páginasCircuito de Formação de Excel Básico - Avancado PDFlazaro MouraAinda não há avaliações
- Cetesb 2012 JustificativaDocumento25 páginasCetesb 2012 JustificativaMarcelo Rodrigues Brito OliveiraAinda não há avaliações
- Extensor MODULADO de Controle Remoto ALLSAT - FUTURASEGDocumento4 páginasExtensor MODULADO de Controle Remoto ALLSAT - FUTURASEGEddie TechAinda não há avaliações
- cb600f Hornet (2005)Documento103 páginascb600f Hornet (2005)Erica AraujoAinda não há avaliações
- FLUL DAI Manual ProcedimentosDocumento51 páginasFLUL DAI Manual ProcedimentosLetras ConvidaAinda não há avaliações
- Atividade 3 Modulo BDocumento5 páginasAtividade 3 Modulo BIgor Silva goulart100% (1)
- Apostila Sistema Perfuracao Ar Comprido CDocumento40 páginasApostila Sistema Perfuracao Ar Comprido Cnaim moreiraAinda não há avaliações
- Atividades Com RespostasDocumento6 páginasAtividades Com RespostasMônica MariaAinda não há avaliações
- Cores Terciárias 8 AnoDocumento2 páginasCores Terciárias 8 AnoAndrea Amaral50% (2)
- Metodos NumericosDocumento27 páginasMetodos NumericosCaio BraitAinda não há avaliações
- Curriculo Cristiano 2021Documento2 páginasCurriculo Cristiano 2021RapzandoAinda não há avaliações
- Prova Unidade 02..Documento2 páginasProva Unidade 02..Marcia AlvesAinda não há avaliações
- Apostila Sistemas Matrizes Lineares DeterminantesDocumento70 páginasApostila Sistemas Matrizes Lineares DeterminantesJoão PedroAinda não há avaliações
- Modelo de Briefing para EventosDocumento5 páginasModelo de Briefing para EventosRomualdo AragãoAinda não há avaliações
- Checklist Comissionamento 1Documento14 páginasChecklist Comissionamento 1fbs1984Ainda não há avaliações