Você também pode gostar
- Uniasselvi - Calculo NumericoDocumento5 páginasUniasselvi - Calculo NumericoSantana Passos100% (1)
- Processos de Refino 1 - DestilaçãoDocumento125 páginasProcessos de Refino 1 - DestilaçãoLuan Gabriel100% (4)
- DANFOSS Refrigeração IndustrialDocumento136 páginasDANFOSS Refrigeração IndustrialleticiaAinda não há avaliações
- Caderno de Exercícios Resolvidos em Python-3Documento62 páginasCaderno de Exercícios Resolvidos em Python-3Graciela Marques63% (8)
- Verificação Linha de Vida 01 PDFDocumento2 páginasVerificação Linha de Vida 01 PDFAdelmárcio AndréAinda não há avaliações
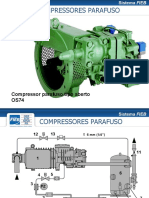
- APRESENTAÇÃO DE COMPRESSORES PETROBRÁS Rev cimatec-PARTE2Documento86 páginasAPRESENTAÇÃO DE COMPRESSORES PETROBRÁS Rev cimatec-PARTE2Toniase Guimaraes BarrosAinda não há avaliações
- Diagrama de BrucknerDocumento9 páginasDiagrama de Brucknercrislaine rodriguesAinda não há avaliações
- Manual de Instruções: Nome Da MáquinaDocumento20 páginasManual de Instruções: Nome Da MáquinaFidal Salomao Sibia100% (1)
- Exame Unificado de Fisica 2012-1Documento42 páginasExame Unificado de Fisica 2012-1Marcos Pacheco100% (1)
- Funções trigono-WPS OfficeDocumento18 páginasFunções trigono-WPS OfficeIvanildo CelsoAinda não há avaliações
- Scania Hpi Ems S6Documento4 páginasScania Hpi Ems S6Tariq Khamaysa100% (2)
- Apostila MEF (Método Dos Elementos Finitos) Utilizando ANSYS - Prof. Pedro Manuel (CEFET-RJ) PDFDocumento65 páginasApostila MEF (Método Dos Elementos Finitos) Utilizando ANSYS - Prof. Pedro Manuel (CEFET-RJ) PDFnorman1968Ainda não há avaliações
- EXERCÍCIOS MATERIA Daniele Tavares MaiaDocumento11 páginasEXERCÍCIOS MATERIA Daniele Tavares MaiaJaqueline MeloAinda não há avaliações
- Relatório Projeto Integrador - Entrega FinalDocumento21 páginasRelatório Projeto Integrador - Entrega FinalLeonardo JunkesAinda não há avaliações
- Relatório Final IC C. EduardoDocumento6 páginasRelatório Final IC C. Eduardocarlos eduardo noletoAinda não há avaliações
- Livro Cálculo Diferencial e Integral IV - III UND PDFDocumento56 páginasLivro Cálculo Diferencial e Integral IV - III UND PDFAndré Amaral Jr.Ainda não há avaliações
- Roteiro 5 - Movimento Plano InclinadoDocumento5 páginasRoteiro 5 - Movimento Plano InclinadoDanielle GarciaAinda não há avaliações
- José Sungo 2 PDFDocumento144 páginasJosé Sungo 2 PDFluis joseAinda não há avaliações
- PO II 10 Caminho MinimoDocumento12 páginasPO II 10 Caminho MinimoCHRISTIAN FELIX GBEDANDE AZONYETINAinda não há avaliações
- Correção Lista 1 - AlgoritmosDocumento9 páginasCorreção Lista 1 - AlgoritmosFrancine AiresAinda não há avaliações
- Calculo 1 - Capitulo 5 PDFDocumento34 páginasCalculo 1 - Capitulo 5 PDFFagner JoséAinda não há avaliações
- Exercício Programa 02 - Cálculo de Integral Por Monte CarloDocumento8 páginasExercício Programa 02 - Cálculo de Integral Por Monte Carloalexandre.barsamAinda não há avaliações
- Funções No MatlabDocumento5 páginasFunções No MatlabLuisGFAinda não há avaliações
- Trabalho Meio CarroDocumento10 páginasTrabalho Meio CarrorildotaffarelAinda não há avaliações
- Xxiii SBRH0698 1 20190505 060436Documento10 páginasXxiii SBRH0698 1 20190505 060436cefmelloAinda não há avaliações
- Relatório Final - SRADocumento23 páginasRelatório Final - SRAIAGO GALVÃOAinda não há avaliações
- Tra 03.2015.guimaraes XXXVCNMAC PS BSACM 3 010215Documento7 páginasTra 03.2015.guimaraes XXXVCNMAC PS BSACM 3 010215Frederico PrudenteAinda não há avaliações
- Livro Digital - Novo Positivo On Matemática Volume 9 PedroDocumento74 páginasLivro Digital - Novo Positivo On Matemática Volume 9 PedroAna carolina Pereira NascimentoAinda não há avaliações
- 4 Função Do 2º Grau PDFDocumento16 páginas4 Função Do 2º Grau PDFFabiano FelintoAinda não há avaliações
- TrabalhoDocumento3 páginasTrabalhoGabriel GotoAinda não há avaliações
- Relatório de Mecanica Dos SólidosDocumento10 páginasRelatório de Mecanica Dos SólidosDaniel Souza RibeiroAinda não há avaliações
- Wavelets Polinomiais: Uma Famlia de Func Oes Splines para Aplicac Oes em Processamento de Sinais e ImagensDocumento8 páginasWavelets Polinomiais: Uma Famlia de Func Oes Splines para Aplicac Oes em Processamento de Sinais e ImagensJoão Marcus LimaAinda não há avaliações
- Calculo NumericoDocumento79 páginasCalculo NumericoRenanFagundesAinda não há avaliações
- Lista 1Documento10 páginasLista 1Davi JordãoAinda não há avaliações
- Calculo 1Documento63 páginasCalculo 1Natanyel GomesAinda não há avaliações
- 04 - Aplicações de Eletromagnetismo Na EngenhariaDocumento73 páginas04 - Aplicações de Eletromagnetismo Na EngenhariaCarlos SergioAinda não há avaliações
- Modelo K-OmegaDocumento30 páginasModelo K-OmegaTakasaki MisakiAinda não há avaliações
- Apostila EDB UFMG - CupertinoDocumento81 páginasApostila EDB UFMG - CupertinoFabricioBarbosa100% (1)
- Aplicacao de Metodos Numericos para Modelagem de FuncoesDocumento20 páginasAplicacao de Metodos Numericos para Modelagem de Funcoesm47h3u5.thomproAinda não há avaliações
- CAUV - P3 - Cálculo Da Equação Da Reta Tangente Ao Gráfico de Uma FunçãoDocumento5 páginasCAUV - P3 - Cálculo Da Equação Da Reta Tangente Ao Gráfico de Uma FunçãoFelipe Chaves0% (1)
- ListaNumerico Python 12 08Documento4 páginasListaNumerico Python 12 08MARCELO DOS SANTOSAinda não há avaliações
- Algebra Linear II Autovetores e Autovalores - Carlos E N Bahiano UFBADocumento38 páginasAlgebra Linear II Autovetores e Autovalores - Carlos E N Bahiano UFBAMichel Cruz0% (1)
- WinplotDocumento15 páginasWinplotv2santistaAinda não há avaliações
- Funcao AfimDocumento14 páginasFuncao Afimvitorio gaussAinda não há avaliações
- Trabalho - OtimizaçãoDocumento3 páginasTrabalho - OtimizaçãoPedro CordoeiraAinda não há avaliações
- EngMat Sme0306 Atividade1Documento4 páginasEngMat Sme0306 Atividade1ViniciusAinda não há avaliações
- Tabela de Derivadas Básicas para Alunos IniciantesDocumento4 páginasTabela de Derivadas Básicas para Alunos IniciantesJoao Raimundo FerreiraAinda não há avaliações
- Apostila PDFDocumento31 páginasApostila PDFBruno MoraisAinda não há avaliações
- Monografia 05Documento25 páginasMonografia 05Andre RezendeAinda não há avaliações
- Diss 205Documento59 páginasDiss 205lilianbezerra353Ainda não há avaliações
- Interpolação - Cálculo NuméricoDocumento9 páginasInterpolação - Cálculo NuméricoWallace SantanaAinda não há avaliações
- At 2 PotDocumento14 páginasAt 2 PotReinaldo Júnior100% (1)
- Lista de Exercícios Algebra Linear IIDocumento32 páginasLista de Exercícios Algebra Linear IIJanine AraujoAinda não há avaliações
- Esp HilbertDocumento18 páginasEsp HilbertJhonnes ToledoAinda não há avaliações
- (Mat) FT5 - Funções ElementaresDocumento14 páginas(Mat) FT5 - Funções ElementaresManel MatosAinda não há avaliações
- Aplicação Das IntegraisDocumento2 páginasAplicação Das IntegraisLucas MarangonAinda não há avaliações
- CA 17 Respostas Gujarati - 4º Edição (Em Português)Documento10 páginasCA 17 Respostas Gujarati - 4º Edição (Em Português)André TsunodaAinda não há avaliações
- Cálculo Numérico: Aula 10: Parte IIIDocumento68 páginasCálculo Numérico: Aula 10: Parte IIIresponde aiAinda não há avaliações
- BCC - Aula 01 - Fundamentos Da ComputaçãoDocumento41 páginasBCC - Aula 01 - Fundamentos Da ComputaçãoPedro Tavares MurakameAinda não há avaliações
- PJFM CalculoIntegralAplicacoes Ed2021Documento104 páginasPJFM CalculoIntegralAplicacoes Ed2021Palavras EspirituaisAinda não há avaliações
- Integração NumericaDocumento24 páginasIntegração NumericaFabricio VigolloAinda não há avaliações
- Apostila-Calculo IIDocumento95 páginasApostila-Calculo IIPriscila AmaralAinda não há avaliações
- Semana 2,1Documento21 páginasSemana 2,1Lukas AlvesAinda não há avaliações
- Avaliação 9 AnoDocumento3 páginasAvaliação 9 AnoPROF. CARLA SAMPAIOAinda não há avaliações
- 2 - Como Alargar Um FuroDocumento12 páginas2 - Como Alargar Um FuroJunior Guedes100% (1)
- Lista4 Impulso Quantidade de Movimento ContinuaçãoDocumento14 páginasLista4 Impulso Quantidade de Movimento ContinuaçãoDaiane CardosoAinda não há avaliações
- Vibracões 3Documento33 páginasVibracões 3Wall LimaAinda não há avaliações
- Cat Duracell WebDocumento55 páginasCat Duracell WebRafael FreitasAinda não há avaliações
- PONTESDocumento60 páginasPONTESNathalia SousaAinda não há avaliações
- Atividade 3 (A3) - Revisão Da Tentativa FisicaDocumento6 páginasAtividade 3 (A3) - Revisão Da Tentativa FisicaDavid CremosinhoAinda não há avaliações
- Cristalização Do AçúcarDocumento7 páginasCristalização Do AçúcarLeonardo Corrêa BrancoAinda não há avaliações
- 1 - Origem e Formação Dos Solos PDFDocumento17 páginas1 - Origem e Formação Dos Solos PDFÍcaro AlencarAinda não há avaliações
- Leituras de Fisica - MecanicaDocumento110 páginasLeituras de Fisica - MecanicaAntonio Carlos TrindadeAinda não há avaliações
- Mobil Dte 26 UltraDocumento10 páginasMobil Dte 26 UltraElisio Alves de Sousa JuniorAinda não há avaliações
- A05-Estudo Das RetasDocumento6 páginasA05-Estudo Das RetasGustavo SalvadorAinda não há avaliações
- Provao de Bolsas Do em Afa Efomm en Questoes 2022Documento18 páginasProvao de Bolsas Do em Afa Efomm en Questoes 2022JORGINtd2Ainda não há avaliações
- Av. Semanal 2 - Física - 1º AnoDocumento2 páginasAv. Semanal 2 - Física - 1º AnoAdriano GomesAinda não há avaliações
- Catálogo Prado AutomaçãoDocumento41 páginasCatálogo Prado AutomaçãoDanilo FerreiraAinda não há avaliações
- Daddy Mill Manual de OperaçãoDocumento1 páginaDaddy Mill Manual de OperaçãoAloizio AugustoAinda não há avaliações
- ATIVIDADE 10.12.2020 Karollaynne 1 T02Documento3 páginasATIVIDADE 10.12.2020 Karollaynne 1 T02Karollaynne Oliveira SantosAinda não há avaliações
- 2° Lista de Máquinas TérmicasDocumento9 páginas2° Lista de Máquinas TérmicascarlosAinda não há avaliações
- Guia de Estudo C6H20Documento10 páginasGuia de Estudo C6H20UniversoTemporalAinda não há avaliações
- Pop Lab Int - 003 201999999999999999999Documento29 páginasPop Lab Int - 003 201999999999999999999Patricia FarmAinda não há avaliações
- Polarização de Luz Por Reflexão e Medida Do Ângulo de BrewsterDocumento10 páginasPolarização de Luz Por Reflexão e Medida Do Ângulo de BrewsterSérgio MiguelAinda não há avaliações
- Apostila Conformação MecanicaDocumento39 páginasApostila Conformação MecanicaJosé Rosa de Souza Farias100% (1)