Você também pode gostar
- As Seis Lições - LivroDocumento21 páginasAs Seis Lições - LivroRonaldo AssisAinda não há avaliações
- Avaliação NR 11 - Empilhadeira - AlunoDocumento3 páginasAvaliação NR 11 - Empilhadeira - AlunoJoão Batista Leonel100% (2)
- Manual de Proprietario Do Motor de Popa Mercury 135-150-175 HP Optimax BDocumento97 páginasManual de Proprietario Do Motor de Popa Mercury 135-150-175 HP Optimax BGiovanni Rocha67% (6)
- Manual de Proprietario Do Motor de Popa Mercury 15 HP BDocumento76 páginasManual de Proprietario Do Motor de Popa Mercury 15 HP BGiovanni RochaAinda não há avaliações
- Manual de Proprietario Do Motor de Popa Mercury 15-20 HP 4T BDocumento99 páginasManual de Proprietario Do Motor de Popa Mercury 15-20 HP 4T BGiovanni RochaAinda não há avaliações
- Manual de Proprietario Do Motor de Popa Mercury 40-50-60 HP 4T EFI BDocumento101 páginasManual de Proprietario Do Motor de Popa Mercury 40-50-60 HP 4T EFI BGiovanni Rocha71% (7)
- Exercito DENTISTICA 2018 2019Documento15 páginasExercito DENTISTICA 2018 2019Jullian JsAinda não há avaliações
- Manual CP90 JRC Prog CP 130 JRC Prog e CP 180 JRC Prog 30 10 - 10 12 12Documento56 páginasManual CP90 JRC Prog CP 130 JRC Prog e CP 180 JRC Prog 30 10 - 10 12 12elderAinda não há avaliações
- Manual E32Documento186 páginasManual E32Wanderley Fonseca83% (6)
- Manual SP4300AVDocumento32 páginasManual SP4300AVFernando Soares100% (3)
- Carrier - Self 40b 06 A 16Documento56 páginasCarrier - Self 40b 06 A 16dovaleramosAinda não há avaliações
- Manual de Proprietario Do Motor de Popa Mercury 75-90-115-125 HP (Carburado) BDocumento78 páginasManual de Proprietario Do Motor de Popa Mercury 75-90-115-125 HP (Carburado) BGiovanni RochaAinda não há avaliações
- Softwares para TopografiaDocumento99 páginasSoftwares para TopografialauraAinda não há avaliações
- Acupuntura Estetica Modulo 1Documento38 páginasAcupuntura Estetica Modulo 1Claudio Solano100% (1)
- Instalação e manutenção de ar condicionado split R-410ADocumento88 páginasInstalação e manutenção de ar condicionado split R-410AWellington SilveiraAinda não há avaliações
- O mundo sem os humanos: a natureza reocuparia a TerraDocumento4 páginasO mundo sem os humanos: a natureza reocuparia a Terramarianaa00100% (2)
- Declaracao PHP PDFDocumento1 páginaDeclaracao PHP PDFTiago JesusAinda não há avaliações
- Iom Split Space 42xqd - 256.08.715-b-09.12 (View)Documento80 páginasIom Split Space 42xqd - 256.08.715-b-09.12 (View)Adilson GomesAinda não há avaliações
- Manutenção MOTOR MERCURY PDFDocumento66 páginasManutenção MOTOR MERCURY PDFJosé SeiçaAinda não há avaliações
- 5 0 HP Manual de Operação Manutenção e Garantia - MercuryDocumento79 páginas5 0 HP Manual de Operação Manutenção e Garantia - MercuryMarcos SchiefelbeinAinda não há avaliações
- Dívida pública em Moçambique: análise da sustentabilidade e implicações do acordo do Conselho ConstitucionalDocumento39 páginasDívida pública em Moçambique: análise da sustentabilidade e implicações do acordo do Conselho ConstitucionalErnesto Alvaro Mussa100% (1)
- AX8 Owners Manual TraduzidoDocumento111 páginasAX8 Owners Manual Traduzidoleovenomous100% (1)
- Manual CIRRUS 80MBDocumento28 páginasManual CIRRUS 80MBafonso397100% (1)
- Manual Do Usuário: Nvrs IntelbrasDocumento177 páginasManual Do Usuário: Nvrs Intelbrasalessandro.scamposAinda não há avaliações
- Manual Motor Popa PDFDocumento78 páginasManual Motor Popa PDFAlexandre PeixotoAinda não há avaliações
- Guia CVD 1004 1008 Web PDFDocumento20 páginasGuia CVD 1004 1008 Web PDFJecnoar Era Tudo Que FaltavaAinda não há avaliações
- Manual Motor de Popa 15hp 4 TemposDocumento71 páginasManual Motor de Popa 15hp 4 Temposricardo bampiAinda não há avaliações
- Guia de instalação e operação do moinho FMODocumento23 páginasGuia de instalação e operação do moinho FMOCarlos Cesar MaiaAinda não há avaliações
- Manual Técnico HVR 1080N 8 Canais 5 em 1Documento24 páginasManual Técnico HVR 1080N 8 Canais 5 em 1André Albino De OliveiraAinda não há avaliações
- Cineral MNL - tc1444Documento29 páginasCineral MNL - tc1444MundodoRadioAinda não há avaliações
- Manual Radio Unidem SolaraDocumento18 páginasManual Radio Unidem SolaraTadeu Carareto RangelAinda não há avaliações
- Manual TV Ptv55g71agbls 4k Led 099553041Documento24 páginasManual TV Ptv55g71agbls 4k Led 099553041Mkl JeffAinda não há avaliações
- Guia 5004 5008 5016 SiteDocumento28 páginasGuia 5004 5008 5016 SiteRamos RamosAinda não há avaliações
- Relatório AUVDocumento105 páginasRelatório AUVamorim.fatecAinda não há avaliações
- Manual Do Usuario VHD 3120 SD 01-20Documento40 páginasManual Do Usuario VHD 3120 SD 01-20Cleoacir Possebon FilhoAinda não há avaliações
- manual instalação 60 70 100 120 e 140TX 140720[21438]Documento81 páginasmanual instalação 60 70 100 120 e 140TX 140720[21438]umclickemumsonhoAinda não há avaliações
- Manual MHDX 5208 5216 04-20 SiteDocumento139 páginasManual MHDX 5208 5216 04-20 SiteEmanuel Vinicius de JesusAinda não há avaliações
- 093 PDFDocumento42 páginas093 PDFWeslley CoelhoAinda não há avaliações
- INSTRUÇÕES DE USO DE TELEVISORDocumento40 páginasINSTRUÇÕES DE USO DE TELEVISORRod StacyAinda não há avaliações
- Philips DSR3401/78Documento44 páginasPhilips DSR3401/78krlstsAinda não há avaliações
- Instalação e funcionamento da lavadora extratora hospitalar SITECDocumento30 páginasInstalação e funcionamento da lavadora extratora hospitalar SITECPaulo Alexandre - Supervisor Manutenção HCTCO100% (1)
- Manual Smart TV Philco 65 PTV65Q20AGBLS 4K LED Android Netflix 099653013Documento24 páginasManual Smart TV Philco 65 PTV65Q20AGBLS 4K LED Android Netflix 099653013ewertonfragosoAinda não há avaliações
- Manual Tester 3000MT 02-21 SiteDocumento29 páginasManual Tester 3000MT 02-21 SiteLRF SolutionAinda não há avaliações
- Diagrama TV Lg+29fu6tl+Ch+Cw62dDocumento22 páginasDiagrama TV Lg+29fu6tl+Ch+Cw62dCoset Desire Coronel50% (2)
- Manual IC-2200H PortuguesDocumento105 páginasManual IC-2200H PortuguesThiago NéoAinda não há avaliações
- Manual Ecoflex PTDocumento96 páginasManual Ecoflex PTjpedro.costa8323100% (1)
- Mega 1503 1507 FlukeDocumento38 páginasMega 1503 1507 FlukeSamuel Phelipe Barão BorgesAinda não há avaliações
- Ihmus-Rpcar001 Rev02 Outubro2016 Utopia HFC R-410a Rap Série B e Rts Série ADocumento92 páginasIhmus-Rpcar001 Rev02 Outubro2016 Utopia HFC R-410a Rap Série B e Rts Série ARossano ConceicaoAinda não há avaliações
- Manual Do Usuário GRADIENTE DR 850 PDocumento21 páginasManual Do Usuário GRADIENTE DR 850 PHerber BianconiAinda não há avaliações
- Manual Sonar Fishfinder 160CDocumento62 páginasManual Sonar Fishfinder 160CVinicius Jlc0% (2)
- Manual de Programação e Instalação Central de Alarme VW16ZDocumento74 páginasManual de Programação e Instalação Central de Alarme VW16Zcarlos sousaAinda não há avaliações
- Manual IC 2200H Manual em PortuguesDocumento105 páginasManual IC 2200H Manual em PortuguesLisnik W. F. BerrielAinda não há avaliações
- Centrifuga Refrigerada Sorvall RC3BP+Documento70 páginasCentrifuga Refrigerada Sorvall RC3BP+Matheus ZilioAinda não há avaliações
- Guia completo PHILIPS MX2500DDocumento15 páginasGuia completo PHILIPS MX2500DRonaldo Do PatrocínioAinda não há avaliações
- Interface Óptica para Máquinas OMI-2: Manual de InstalaçãoDocumento30 páginasInterface Óptica para Máquinas OMI-2: Manual de InstalaçãolovetanaAinda não há avaliações
- Philips VCR 599Documento24 páginasPhilips VCR 599RODRIGO EMANUEL FontanAinda não há avaliações
- Televisor DVD ManualDocumento52 páginasTelevisor DVD ManualAndres Larenas OrtizAinda não há avaliações
- 7.07.0433 - 5.05.1127 - FIRST - SE WASH2020 - Manual de Instalação - R1Documento70 páginas7.07.0433 - 5.05.1127 - FIRST - SE WASH2020 - Manual de Instalação - R1Evandro FerreiraAinda não há avaliações
- 2785 ReferenciaDocumento24 páginas2785 Referenciamay xiao fangAinda não há avaliações
- Manual VHD 3115 SD Portugues 02-17 SiteDocumento44 páginasManual VHD 3115 SD Portugues 02-17 SiteAnderson SilvaAinda não há avaliações
- UG - Ed4 PortuguêsDocumento140 páginasUG - Ed4 Portuguêsjurgen.kdiasAinda não há avaliações
- PDF Manual Acoplamento Hle HFF Rev120 PDF - CompressDocumento33 páginasPDF Manual Acoplamento Hle HFF Rev120 PDF - CompressDênis DáyolAinda não há avaliações
- Manual Do Usuario MHDX 1104 MHDX 1108 MHDX 1116Documento117 páginasManual Do Usuario MHDX 1104 MHDX 1108 MHDX 1116Alberto Gomes da SilvaAinda não há avaliações
- KLV 32l500aDocumento59 páginasKLV 32l500aDelia Sirpa BautistaAinda não há avaliações
- Implementando Um Inversor De Frequência Com DspicNo EverandImplementando Um Inversor De Frequência Com DspicAinda não há avaliações
- Implementando Um Inversor De Frequência Com Dspic Escalar Programado No Dspic30f E Mikroc Com Driver Para Motor De Até 3 CvNo EverandImplementando Um Inversor De Frequência Com Dspic Escalar Programado No Dspic30f E Mikroc Com Driver Para Motor De Até 3 CvAinda não há avaliações
- Ibercusa Manu Completo 002 PDFDocumento91 páginasIbercusa Manu Completo 002 PDFTiago JesusAinda não há avaliações
- Ibercusa Manu Completo 003 PDFDocumento37 páginasIbercusa Manu Completo 003 PDFTiago JesusAinda não há avaliações
- P35778 Manual Forno Turbo New Light PRP 5000 NL PDFDocumento12 páginasP35778 Manual Forno Turbo New Light PRP 5000 NL PDFTiago JesusAinda não há avaliações
- Cronograma Rov Uwild SSV King Maker Rev2 2023-02-09Documento42 páginasCronograma Rov Uwild SSV King Maker Rev2 2023-02-09Tiago JesusAinda não há avaliações
- SPD Ahug-Smcups BZ PDFDocumento26 páginasSPD Ahug-Smcups BZ PDFTiago JesusAinda não há avaliações
- Curso de técnicas de operações em terminais de contêineresDocumento11 páginasCurso de técnicas de operações em terminais de contêineresAngelo BotelhoAinda não há avaliações
- Formação Identidade e Relação Pais-FilhosDocumento16 páginasFormação Identidade e Relação Pais-FilhosFelix Nungo FmnAinda não há avaliações
- Lista 02Documento4 páginasLista 02rubens alvesAinda não há avaliações
- Matrizes Determinantes IIDocumento2 páginasMatrizes Determinantes IIRonaldo NdalaAinda não há avaliações
- As imunidades tributárias do artigo 150, VI da Constituição FederalDocumento3 páginasAs imunidades tributárias do artigo 150, VI da Constituição FederalAdriana MorettonAinda não há avaliações
- GratidãoDocumento2 páginasGratidãocristinalang21Ainda não há avaliações
- Sensoriamento inteligente de transformadores para gestão de ativosDocumento8 páginasSensoriamento inteligente de transformadores para gestão de ativosSergioCarabetti100% (1)
- Teste de Rotor BobinadoDocumento2 páginasTeste de Rotor BobinadoHipot ServiceAinda não há avaliações
- Regras VFR TMA-SP e TMA-RJDocumento2 páginasRegras VFR TMA-SP e TMA-RJDiego GomesAinda não há avaliações
- Manejo integrado das pragas da mandiocaDocumento17 páginasManejo integrado das pragas da mandiocaIraci RosaAinda não há avaliações
- Seer,+Journal+Manager,+884 2263 1 CEDocumento20 páginasSeer,+Journal+Manager,+884 2263 1 CEJerônimo de Freitas RegisAinda não há avaliações
- Docs V TrabalhoDocumento1 páginaDocs V TrabalhoPaulo MeloAinda não há avaliações
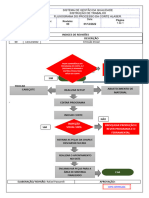
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Documento1 página10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliAinda não há avaliações
- 4 Principais Erros Na Instalação Do Ar-Condicionado - WebArCondicionadoDocumento2 páginas4 Principais Erros Na Instalação Do Ar-Condicionado - WebArCondicionadopauloAinda não há avaliações
- Codigos de Contas Do SNCDocumento8 páginasCodigos de Contas Do SNCAntónio Fernando FerreiraAinda não há avaliações
- Erros de percepção e tomada de decisãoDocumento3 páginasErros de percepção e tomada de decisãoYara Conceicao ConceicaoAinda não há avaliações
- Ebook PrincipalDocumento28 páginasEbook Principalcamily candyAinda não há avaliações
- Os 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoDocumento3 páginasOs 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoSílvio FonteneleAinda não há avaliações
- Modelo de Roteiro CERIMONIALDocumento2 páginasModelo de Roteiro CERIMONIALMayara Costa100% (1)
- Introducao Aos BiomasDocumento9 páginasIntroducao Aos Biomasdaniel.morayan010Ainda não há avaliações
- Análise de tensões em vasos de pressão cilíndricos e esféricosDocumento42 páginasAnálise de tensões em vasos de pressão cilíndricos e esféricosJosé Roberto HonórioAinda não há avaliações
- Nattokinase: fibrinólise e saúde cardiovascularDocumento4 páginasNattokinase: fibrinólise e saúde cardiovascularSandro Rogério AlvaresAinda não há avaliações
- Formiato de etila: Ficha de segurançaDocumento7 páginasFormiato de etila: Ficha de segurançaafrakekoAinda não há avaliações




































![manual instalação 60 70 100 120 e 140TX 140720[21438]](https://imgv2-2-f.scribdassets.com/img/document/720476891/149x198/a45f4cbf84/1712368967?v=1)