Você também pode gostar
- Elemaq 2012 Aula5Documento13 páginasElemaq 2012 Aula5maiconmecAinda não há avaliações
- Süssekind - Pórticos Planos PDFDocumento21 páginasSüssekind - Pórticos Planos PDFJuan CorvalánAinda não há avaliações
- Carga Axial e Estado Plano de TensãoDocumento63 páginasCarga Axial e Estado Plano de TensãoHigh Level FlyingAinda não há avaliações
- Barras Carregadas Axialmente PDFDocumento93 páginasBarras Carregadas Axialmente PDFSara SotoAinda não há avaliações
- Aula 11 Carga AxialDocumento31 páginasAula 11 Carga AxialMarcelo LiraAinda não há avaliações
- Aula - Cargas Axiais 2a - 2015 - Segunda Aula - MoodleDocumento47 páginasAula - Cargas Axiais 2a - 2015 - Segunda Aula - MoodleBeatriz GambaroAinda não há avaliações
- Lista6 SolucaoDocumento6 páginasLista6 SolucaoAnonymous dXQRsCEPAinda não há avaliações
- Carga Axial e Estado Plano de Tensão - CONTEÚDO DIGITALDocumento64 páginasCarga Axial e Estado Plano de Tensão - CONTEÚDO DIGITALJânio PabloAinda não há avaliações
- Física MackenzieDocumento6 páginasFísica Mackenzievit05Ainda não há avaliações
- Aula 5 Mec Geral 19 2Documento26 páginasAula 5 Mec Geral 19 2Thiago lopesAinda não há avaliações
- ExerciciosresolvidosCAP 8equilibrio TorqueDocumento14 páginasExerciciosresolvidosCAP 8equilibrio TorqueÍcaro OjuaraAinda não há avaliações
- 2 - Apostila de Estática - Teorias e Testes de Fixação PDFDocumento26 páginas2 - Apostila de Estática - Teorias e Testes de Fixação PDFJonas Carlos SantanaAinda não há avaliações
- Lista Newton1Documento2 páginasLista Newton1Anna Flávia NovaisAinda não há avaliações
- Aula 12 - Exer Lei de HookeDocumento6 páginasAula 12 - Exer Lei de HookeBrunoAinda não há avaliações
- Apostila Rema Slides Cap 5Documento104 páginasApostila Rema Slides Cap 5Vitor Paiva100% (1)
- Estática PDFDocumento6 páginasEstática PDFkibinhoAinda não há avaliações
- Cap 3 - Esforco AxialDocumento19 páginasCap 3 - Esforco AxialJose Moises MoisesAinda não há avaliações
- Questões de AulaDocumento4 páginasQuestões de AulaEduarda GrandoAinda não há avaliações
- Ef12 Questao Aula 3 ResolucaoDocumento5 páginasEf12 Questao Aula 3 ResolucaoaninhafqAinda não há avaliações
- Gabarito Lista-1Documento11 páginasGabarito Lista-1Eduardo GomideAinda não há avaliações
- 2um Homem Que Está Apostando Corrida Com o FilhoDocumento9 páginas2um Homem Que Está Apostando Corrida Com o FilhoMarilsa NoronhaAinda não há avaliações
- OBF2006 F2 3a GabDocumento7 páginasOBF2006 F2 3a GabLuisAinda não há avaliações
- Lista 16 - Equilíbrio de Ponto MaterialDocumento12 páginasLista 16 - Equilíbrio de Ponto MaterialSX TekashiAinda não há avaliações
- Estástica 1Documento6 páginasEstástica 1Mathematical ContestsAinda não há avaliações
- A 06Documento0 páginaA 06José BritesAinda não há avaliações
- 2 BIMSeriede ESTATICA2021Documento10 páginas2 BIMSeriede ESTATICA2021João Pedro CardosoAinda não há avaliações
- Act. 4 - CP 1Documento8 páginasAct. 4 - CP 1wesdinho pauloAinda não há avaliações
- Compressao de Barras - ClassroomDocumento44 páginasCompressao de Barras - ClassroomJonatas JunioAinda não há avaliações
- Exercícios Isostática 01 - Estática No PlanoDocumento6 páginasExercícios Isostática 01 - Estática No PlanoLucas MenezesAinda não há avaliações
- Apostila de Física Aplicada II PDFDocumento35 páginasApostila de Física Aplicada II PDFkadubrasil2009Ainda não há avaliações
- Tensão Aula 4 PDFDocumento83 páginasTensão Aula 4 PDFana juliaAinda não há avaliações
- Prática - Oscilações Mecânicas. Estudo Do Movimento Oscilatório Do Sistema Corpo - Mola.Documento7 páginasPrática - Oscilações Mecânicas. Estudo Do Movimento Oscilatório Do Sistema Corpo - Mola.Joelson TetaAinda não há avaliações
- MaterialdeMecanicaGeralParte5v261015 20151026202715Documento21 páginasMaterialdeMecanicaGeralParte5v261015 20151026202715Sarah AlvesAinda não há avaliações
- Aula Tensoes 1a ParteDocumento20 páginasAula Tensoes 1a ParteMarengula GracioAinda não há avaliações
- Exercicios Extras p1Documento3 páginasExercicios Extras p1Tassiane MoraesAinda não há avaliações
- Ap SolDocumento8 páginasAp SolRafael MadeiraAinda não há avaliações
- Afa Gabarito Final 18 06 2023-2Documento49 páginasAfa Gabarito Final 18 06 2023-2Daniel VinhasAinda não há avaliações
- Exercícios de Revisão Aplicação Leis de Newton (Resolvidos)Documento6 páginasExercícios de Revisão Aplicação Leis de Newton (Resolvidos)Marcelo ErissonAinda não há avaliações
- FIS1Documento6 páginasFIS1Victor GaldinoAinda não há avaliações
- APOSTILA ResistenciaDocumento43 páginasAPOSTILA ResistenciaMario Machado100% (1)
- DH SDAHDocumento7 páginasDH SDAHMarcus PestanaAinda não há avaliações
- Aula 18 - Reticulados Treli AsDocumento9 páginasAula 18 - Reticulados Treli AsBrunoAinda não há avaliações
- FATEC2002 2diaDocumento34 páginasFATEC2002 2diaJoão Augusto Venâncio da SilvaAinda não há avaliações
- Mecanica Dos Solidos 02Documento8 páginasMecanica Dos Solidos 02Antonio NetoAinda não há avaliações
- Lista EstaticaDocumento27 páginasLista EstaticaJAinda não há avaliações
- Tensões e Deformações - Parte 2Documento29 páginasTensões e Deformações - Parte 2bruno dittbernerAinda não há avaliações
- Estática - ÓtimoDocumento68 páginasEstática - ÓtimoHelgga Cerqueira100% (1)
- Ex 6Documento8 páginasEx 6Etiene GarciaAinda não há avaliações
- Ita+1+Fase+ +simulado+8+ (BBF)Documento25 páginasIta+1+Fase+ +simulado+8+ (BBF)ArthurAinda não há avaliações
- Introdução Resistência Dos MateriaisDocumento39 páginasIntrodução Resistência Dos MateriaisFabio Lunardi AntunesAinda não há avaliações
- Aula 4 - Resistencia Dos MateriaisDocumento21 páginasAula 4 - Resistencia Dos Materiaisengeproduezo100% (2)
- 01 Fabio 1 ANOF2 Aula 14Documento2 páginas01 Fabio 1 ANOF2 Aula 14carrerajrAinda não há avaliações
- Relatório 03. Coeficientes de Elasticidades de MolaDocumento7 páginasRelatório 03. Coeficientes de Elasticidades de MolaRosiane Almeida0% (1)
- Inaugural Resistência 1Documento12 páginasInaugural Resistência 1orangotaAinda não há avaliações
- Pmoc - SplitsDocumento4 páginasPmoc - SplitsAna Maria PaivaAinda não há avaliações
- Questionário Unidade IIIDocumento5 páginasQuestionário Unidade IIILourenço RossetoAinda não há avaliações
- Lista - As Leis de Newton 2 UhclvxdDocumento4 páginasLista - As Leis de Newton 2 UhclvxdMicarlos TeixeiraAinda não há avaliações
- Análise de Vibração Relatório Técnico 0119Documento17 páginasAnálise de Vibração Relatório Técnico 0119Cesar SampaioAinda não há avaliações
- Alumínio ALCAST PDFDocumento1 páginaAlumínio ALCAST PDFRobson PereiraAinda não há avaliações
- Seqüência e Rotina de PosicionamentoDocumento19 páginasSeqüência e Rotina de Posicionamentodjbruno_oliver100% (1)
- Tensão de Aderência - Manoel Xavier - AlunosDocumento8 páginasTensão de Aderência - Manoel Xavier - AlunosManoel XavierAinda não há avaliações
- Motor LinearDocumento13 páginasMotor LinearTiago RochaAinda não há avaliações
- Apostila - ABC Do Conforto AcústicoDocumento44 páginasApostila - ABC Do Conforto AcústicoFran MoroAinda não há avaliações
- Óxido de NióbioDocumento5 páginasÓxido de Nióbio_Titchão_Ainda não há avaliações
- Ae f11 Questao Aula MecDocumento3 páginasAe f11 Questao Aula MecSandra SilvestreAinda não há avaliações
- Viscosimetro Copo Ford 4Documento1 páginaViscosimetro Copo Ford 4ClovisAinda não há avaliações
- Lista de Exercicios 2 - Mecânica GeralDocumento2 páginasLista de Exercicios 2 - Mecânica GeralAyraneRAinda não há avaliações
- 1 Aula Do Cap11 RolamentoDocumento13 páginas1 Aula Do Cap11 RolamentoLarissa GalvãoAinda não há avaliações
- MINERAÇÃO1 - Bombas de Vacuo NashDocumento89 páginasMINERAÇÃO1 - Bombas de Vacuo NashHugo José Abreu de Souza100% (1)
- Princípio Do Raciocínio GeológicoDocumento8 páginasPrincípio Do Raciocínio GeológicoMaria TrindadeAinda não há avaliações
- Aula - Instrumento de Medição de TemperaturaDocumento48 páginasAula - Instrumento de Medição de TemperaturaThiago :3Ainda não há avaliações
- Apostilinha Equilíbrio QuímicoDocumento1 páginaApostilinha Equilíbrio QuímicoOtoazevedo OtoazevedoAinda não há avaliações
- Tópico de Mecanica ClássicaDocumento321 páginasTópico de Mecanica ClássicaRonildo Ronyart LopesAinda não há avaliações
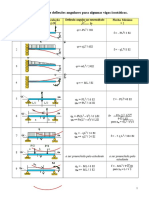
- FlechasDocumento3 páginasFlechasHigor MartinsAinda não há avaliações
- Relatorio 2 de FisicaDocumento10 páginasRelatorio 2 de FisicaAlisson Roegelin Dos SantosAinda não há avaliações
- Aula 2 - Trabalho Termodinâmico - Fisica IIDocumento7 páginasAula 2 - Trabalho Termodinâmico - Fisica IIvmtmasterAinda não há avaliações
- Apendice A Incropera PDFDocumento30 páginasApendice A Incropera PDFCarlos Augusto LimaAinda não há avaliações
- NBR9062 2017 - Projeto e Execução de Estruturas de Concreto Pré-Moldado - P 11-20Documento10 páginasNBR9062 2017 - Projeto e Execução de Estruturas de Concreto Pré-Moldado - P 11-20WEBER RODRIGO GOMES SILVAAinda não há avaliações
- Fichas Técnicas CupolexDocumento26 páginasFichas Técnicas CupolexCarlos Broots RibeiroAinda não há avaliações
- Métodos Diagnósticos Utilizados em Laboratórios ClínicosDocumento68 páginasMétodos Diagnósticos Utilizados em Laboratórios ClínicosLuanaJBCAinda não há avaliações
- SIstemas ConservativosDocumento38 páginasSIstemas ConservativosFrancisco SilvaAinda não há avaliações
- Ibracon 2014Documento16 páginasIbracon 2014AbdennourAinda não há avaliações
- Aula 05 - DifusãoDocumento27 páginasAula 05 - DifusãoFernando MarquesAinda não há avaliações