Você também pode gostar
- Teoria de Controle ModernoDocumento231 páginasTeoria de Controle ModernoValéria Lima Antônio FilhoAinda não há avaliações
- Formulários de Consulta - Transformada de Laplace - Ckt5-Tab1Documento2 páginasFormulários de Consulta - Transformada de Laplace - Ckt5-Tab1AntonioAinda não há avaliações
- Nota de Aula - Transf LaplaceDocumento19 páginasNota de Aula - Transf LaplaceCicero MelloAinda não há avaliações
- Analiza de SedimentareDocumento6 páginasAnaliza de Sedimentareandrei_bertea7771Ainda não há avaliações
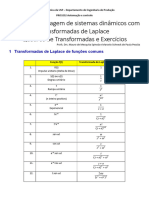
- PRO3252 A04 Laplace Formulas e Exercicios 2023Documento5 páginasPRO3252 A04 Laplace Formulas e Exercicios 2023Diegocalixtohotmail.com CalixtoAinda não há avaliações
- NT 02 TCDocumento12 páginasNT 02 TC084250Ainda não há avaliações
- Equações DiferenciaisDocumento2 páginasEquações DiferenciaisJefersonCorreiaAinda não há avaliações
- Aula 9 Transformada de LaplaceDocumento54 páginasAula 9 Transformada de LaplaceJoyceCrisAinda não há avaliações
- Fluid-Mechanics-Fundamentals-And-Applications-3rd-Edition-Cengel-And-Cimbala-2014 PTDocumento200 páginasFluid-Mechanics-Fundamentals-And-Applications-3rd-Edition-Cengel-And-Cimbala-2014 PTTiago OliveiraAinda não há avaliações
- Folha de Dicas Dos Sistemas de Controle de Feedback ME2142EDocumento3 páginasFolha de Dicas Dos Sistemas de Controle de Feedback ME2142EScribdTranslationsAinda não há avaliações
- 2021 Ici 1S 04Documento4 páginas2021 Ici 1S 04Matheus IsoldiAinda não há avaliações
- Livro de Clculo 3 Prof. Sinvaldo Gama PDFDocumento121 páginasLivro de Clculo 3 Prof. Sinvaldo Gama PDFLucas Marchetti BragaAinda não há avaliações
- Elecap1 ADocumento4 páginasElecap1 AWandolly Baluz MacielAinda não há avaliações
- Transformada Laplace e Inversa PDFDocumento23 páginasTransformada Laplace e Inversa PDFAndreea DrăghiciAinda não há avaliações
- Circuitos Acoplados MagneticamenteDocumento18 páginasCircuitos Acoplados MagneticamenteJoão VictorAinda não há avaliações
- Seção 14.3Documento2 páginasSeção 14.3Angelina LopesAinda não há avaliações
- Formulário 2016Documento1 páginaFormulário 2016João Miguel ViegasAinda não há avaliações
- Alexei Schmitz - PP02 - Mecânica Dos Solos - Civil - 2021-01Documento9 páginasAlexei Schmitz - PP02 - Mecânica Dos Solos - Civil - 2021-01MATHEUS KLABUNDEAinda não há avaliações
- Aula 2 - Funções de Excitação - Katia PDFDocumento49 páginasAula 2 - Funções de Excitação - Katia PDFMarcos Antonio Arantes de FreitasAinda não há avaliações
- Aula 02 - Revisão e DiodosDocumento27 páginasAula 02 - Revisão e DiodosMOISES SAMPAIO DA SILVAAinda não há avaliações
- RER Lista3 2014 2Documento11 páginasRER Lista3 2014 2Fernando SantosAinda não há avaliações
- Transformada de Laplace Na Análise de CircuitosDocumento29 páginasTransformada de Laplace Na Análise de CircuitosIsmaily TavaresAinda não há avaliações
- Motivacao AlexandreDocumento17 páginasMotivacao AlexandreEduardo ReisAinda não há avaliações
- Formulario Controle ContinuoDocumento7 páginasFormulario Controle ContinuoOseias CardosoAinda não há avaliações
- Transformada de LaplaceDocumento6 páginasTransformada de Laplacetamires.bojjisAinda não há avaliações
- Introducao SEE1bDocumento25 páginasIntroducao SEE1bPaulo H TavaresAinda não há avaliações
- Aula 745 Sinais e SistemasDocumento17 páginasAula 745 Sinais e SistemasYuri SeifaneAinda não há avaliações
- Movimento Uniforme IIDocumento7 páginasMovimento Uniforme IIClaude BrechtAinda não há avaliações
- Formulários de Consulta - Série de Fourier - Ckt6-TabDocumento2 páginasFormulários de Consulta - Série de Fourier - Ckt6-TabAntonioAinda não há avaliações
- Formulário - SL IIDocumento4 páginasFormulário - SL IICesar RothAinda não há avaliações
- Lista 6Documento2 páginasLista 6Kelly Ane SantosAinda não há avaliações
- Transformada de LaplaceDocumento36 páginasTransformada de LaplaceSergio FernandesAinda não há avaliações
- Eletr Pot1 2Documento22 páginasEletr Pot1 2Pablo CarvalhoAinda não há avaliações
- Curva S Mes Marzo 2021Documento3 páginasCurva S Mes Marzo 2021Jhon Antony Ramos TrujilloAinda não há avaliações
- Lista de Exercicios 3 - Provas Anteriores 2019 1sDocumento8 páginasLista de Exercicios 3 - Provas Anteriores 2019 1sCarllos LimmaAinda não há avaliações
- Aula 1 Et2Documento21 páginasAula 1 Et2SergiooAinda não há avaliações
- A1 RevisoMatematica LaplaceDocumento21 páginasA1 RevisoMatematica LaplacebrineniziiziAinda não há avaliações
- ENG03002 H - Tópicos EspeciaisDocumento21 páginasENG03002 H - Tópicos EspeciaisengbacarinAinda não há avaliações
- Transformadas Inversas - Resumo e Exercícios ResolvidosDocumento14 páginasTransformadas Inversas - Resumo e Exercícios ResolvidosWagner Brito100% (1)
- Apostila - Analise de Sistemas LinearesDocumento46 páginasApostila - Analise de Sistemas LinearesMendel Tavares PassosAinda não há avaliações
- Teoria Dos Erros 2023-Part2Documento19 páginasTeoria Dos Erros 2023-Part2miqueiaspimentaAinda não há avaliações
- TP2 SolDocumento5 páginasTP2 SolAna Carina CostaAinda não há avaliações
- Teoria de Euler-BernoulliDocumento6 páginasTeoria de Euler-BernoulliBrendon MenezesAinda não há avaliações
- Lista 3 - Calculo 1Documento3 páginasLista 3 - Calculo 1Aline da Silva RodriguesAinda não há avaliações
- Prova1 2023 1 GabaritoDocumento3 páginasProva1 2023 1 GabaritoMarcelo COD12Ainda não há avaliações
- Aula 1 - Funções Com Valores VetoriaisDocumento13 páginasAula 1 - Funções Com Valores VetoriaisMarkus DämonAinda não há avaliações
- 3 Retificadores Monofásicos Não Controlados Parte 1Documento19 páginas3 Retificadores Monofásicos Não Controlados Parte 1Abel HenriqueAinda não há avaliações
- Equações Diferenciais - Decaimento RadioativoDocumento9 páginasEquações Diferenciais - Decaimento RadioativoAbel NetoAinda não há avaliações
- Transformada Da Convolução - Resumo e Exercícios ResolvidosDocumento7 páginasTransformada Da Convolução - Resumo e Exercícios ResolvidosWagner BritoAinda não há avaliações
- Prova1 2018 2Documento2 páginasProva1 2018 2Carlos Aurélio Faria da RochaAinda não há avaliações
- Aula 4Documento17 páginasAula 4Investigação OperacionalAinda não há avaliações
- Apostila FasoresDocumento9 páginasApostila Fasoreslucami BelinskiiAinda não há avaliações
- Formulario MiDocumento4 páginasFormulario MiJoão SilvaAinda não há avaliações
- Ellyen K - Pusk. Widodaren30062022145828Documento5 páginasEllyen K - Pusk. Widodaren30062022145828Anonymous K54BoY6PI5Ainda não há avaliações
- Img 20230614 0001Documento1 páginaImg 20230614 0001YayanAinda não há avaliações
- Lista 5Documento1 páginaLista 5Lucas SilveiraAinda não há avaliações
- Exercícios Resolvido EnergiaDocumento11 páginasExercícios Resolvido Energiasamuel nicolauAinda não há avaliações
- Ele1095 2a FouriertcDocumento4 páginasEle1095 2a FouriertcMarcelo PfaiferAinda não há avaliações
- Potencia RPSDocumento11 páginasPotencia RPSMauricioAinda não há avaliações
- Atividades e Intervenção em Psicopedagogia Clínica: WBA0774 - v1.0Documento32 páginasAtividades e Intervenção em Psicopedagogia Clínica: WBA0774 - v1.0Suzany PimentelAinda não há avaliações
- Proposições e ConceitosDocumento11 páginasProposições e ConceitosSamuel MendesAinda não há avaliações
- Teoria Da Amostragem - Distribuição Amostral PDFDocumento13 páginasTeoria Da Amostragem - Distribuição Amostral PDFCastanTNAinda não há avaliações
- Plano de Aula PG AnaliseDocumento11 páginasPlano de Aula PG AnaliseWillow Magrini100% (1)
- Teorema de TychonoffDocumento25 páginasTeorema de TychonoffCléia WinckAinda não há avaliações
- Prof Emanuel Aprof 10 Paran 2016Documento16 páginasProf Emanuel Aprof 10 Paran 2016Thiago de Paula e SilvaAinda não há avaliações
- Análise Discriminante (Módulo I)Documento16 páginasAnálise Discriminante (Módulo I)Vivian KostaAinda não há avaliações
- 7anoMATEMATICA24 03 2020CORRIGIDADocumento4 páginas7anoMATEMATICA24 03 2020CORRIGIDAAparecida De Fatima Gomes MacaubasAinda não há avaliações
- Aemat10 FF 1 PDFDocumento3 páginasAemat10 FF 1 PDFCarla CardosoAinda não há avaliações
- Lógica Fuzzy - NotebookDocumento20 páginasLógica Fuzzy - NotebookVictorLeonyAinda não há avaliações
- Prova Extramuros Doutorado - 2014Documento1 páginaProva Extramuros Doutorado - 2014FidelHuamanAlarconAinda não há avaliações
- Geometria Euclidiana Plana by Eliane Quelho Frota Rezende e Maria Lúcia Bontorim de Queiroz (Z-Lib - Org) 1Documento257 páginasGeometria Euclidiana Plana by Eliane Quelho Frota Rezende e Maria Lúcia Bontorim de Queiroz (Z-Lib - Org) 1João Victor França GomesAinda não há avaliações
- Live Introdução Ao RLM Parte 3Documento16 páginasLive Introdução Ao RLM Parte 3Lucas MartinsAinda não há avaliações
- Dissertacao HistoriaMatematicaMetodologiaDocumento120 páginasDissertacao HistoriaMatematicaMetodologiaJailson CarvalhoAinda não há avaliações
- Exercicios Resolvidos de Porcentagem PDFDocumento11 páginasExercicios Resolvidos de Porcentagem PDFRodrigo Kawamura100% (2)
- 5º Simulado - Afcf - 2º Encontro - 15-08-2021 - Arrancada - Tespmat - Com Gabarito - 01Documento19 páginas5º Simulado - Afcf - 2º Encontro - 15-08-2021 - Arrancada - Tespmat - Com Gabarito - 01Aline FonteAinda não há avaliações
- GeogebraDocumento76 páginasGeogebraMurillo Henrique100% (1)
- 01 - P.A. e P.G. (80 Questões)Documento15 páginas01 - P.A. e P.G. (80 Questões)Wesley Ferreir de OliveiraAinda não há avaliações
- Escola Estadual "São Sebastião Do Sacramento": Avaliação de Matemática "Estudos Independentes" 6° Ano Professora: SamilaDocumento4 páginasEscola Estadual "São Sebastião Do Sacramento": Avaliação de Matemática "Estudos Independentes" 6° Ano Professora: SamilaSamila Silva100% (1)
- 4 Questões para o Quarto Simulado GeralDocumento2 páginas4 Questões para o Quarto Simulado GeralMaxwell OliveiraAinda não há avaliações
- Unidade 01 - Modelagem SVC e SEDDocumento68 páginasUnidade 01 - Modelagem SVC e SEDAntonio Nazareno ValenteAinda não há avaliações
- Circuitos AritmeticosDocumento19 páginasCircuitos AritmeticosAldinei Aragão100% (2)
- A Matemática Na Formação Do Professor Da Educação Infantil e Anos Iniciais: Uma Análise A Partir de Trabalhos Publicados em Eventos Do Campo Da Educação MatemáticaDocumento179 páginasA Matemática Na Formação Do Professor Da Educação Infantil e Anos Iniciais: Uma Análise A Partir de Trabalhos Publicados em Eventos Do Campo Da Educação MatemáticaEditora Pimenta CulturalAinda não há avaliações
- Qual A Origem Da Raiz Quadrada - Livre PensamentoDocumento6 páginasQual A Origem Da Raiz Quadrada - Livre PensamentoSergio Paulino BandeiraAinda não há avaliações
- Séries e Somatórios - MatemáticaDocumento19 páginasSéries e Somatórios - MatemáticaAlessandroAinda não há avaliações
- Apostila Est e Prob - 2° Sem 2018 - FinalDocumento132 páginasApostila Est e Prob - 2° Sem 2018 - Finalgusravo7Ainda não há avaliações
- Matemática PDFDocumento4 páginasMatemática PDFRuan AssunçãoAinda não há avaliações
- 1ºmus 7 Sem Mat GemDocumento2 páginas1ºmus 7 Sem Mat GemgemilsonAinda não há avaliações
- Modelagem Cinematica Direta e Inversa de RobosDocumento21 páginasModelagem Cinematica Direta e Inversa de Roboseduardo_sa_aut100% (1)
- Ficha 4 Equações de Planos 11Documento3 páginasFicha 4 Equações de Planos 11Maria IsabelAinda não há avaliações