Você também pode gostar
- Transformada Laplace e Inversa PDFDocumento23 páginasTransformada Laplace e Inversa PDFAndreea DrăghiciAinda não há avaliações
- Aula 9 Transformada de LaplaceDocumento54 páginasAula 9 Transformada de LaplaceJoyceCrisAinda não há avaliações
- PRO3252 A04 Laplace Formulas e Exercicios 2023Documento5 páginasPRO3252 A04 Laplace Formulas e Exercicios 2023Diegocalixtohotmail.com CalixtoAinda não há avaliações
- Modelagem CircuitosDocumento50 páginasModelagem CircuitosJeremias RibeiroAinda não há avaliações
- Aula 1Documento15 páginasAula 1Gabriela AlcantaraAinda não há avaliações
- 2021 Ici 1S 04Documento4 páginas2021 Ici 1S 04Matheus IsoldiAinda não há avaliações
- 02 Laplace PDFDocumento27 páginas02 Laplace PDFNey Jr.Ainda não há avaliações
- Lista 3 - MmaDocumento2 páginasLista 3 - MmaRenan Ramos de MoraisAinda não há avaliações
- Nota de Aula - Transf LaplaceDocumento19 páginasNota de Aula - Transf LaplaceCicero MelloAinda não há avaliações
- ENG-10933 - Controle de Processos - Aula 08Documento15 páginasENG-10933 - Controle de Processos - Aula 08Alessandro JesusAinda não há avaliações
- Transformada de LaplaceDocumento6 páginasTransformada de Laplacetamires.bojjisAinda não há avaliações
- 02 Transformada de Laplace Formulas+PropriedadesDocumento7 páginas02 Transformada de Laplace Formulas+PropriedadesDavi Pina Barros100% (1)
- Reginaldo LaplaceDocumento119 páginasReginaldo LaplaceMauricio CalheiroAinda não há avaliações
- Capítulo 4 - Transformaç - o de LaplaceDocumento53 páginasCapítulo 4 - Transformaç - o de LaplaceHernane Da LuzAinda não há avaliações
- Apostila Transformada de Laplace PDFDocumento11 páginasApostila Transformada de Laplace PDFMarcelo Lopes VieiraAinda não há avaliações
- Transformada de LaplaceDocumento14 páginasTransformada de LaplaceManuelMendesAinda não há avaliações
- Transform Ad Adela PlaceDocumento3 páginasTransform Ad Adela PlaceTavimnunesAinda não há avaliações
- Modelos de ProcessosDocumento34 páginasModelos de ProcessosJanaina MaiaAinda não há avaliações
- Formulários de Consulta - Transformada de Laplace - Ckt5-Tab1Documento2 páginasFormulários de Consulta - Transformada de Laplace - Ckt5-Tab1AntonioAinda não há avaliações
- Aula 8 - Análise de FourierDocumento42 páginasAula 8 - Análise de Fourierslipcout100% (1)
- EEL7052 Prova1Documento2 páginasEEL7052 Prova1Gabriel GoulartAinda não há avaliações
- Sistemas Dinamicos e Ensaios PraticosDocumento5 páginasSistemas Dinamicos e Ensaios PraticosVinícius Moreira SouzaAinda não há avaliações
- 2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciaDocumento49 páginas2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciahinnaAinda não há avaliações
- Transformada de Laplace 0Documento44 páginasTransformada de Laplace 0Alexandre AraujoAinda não há avaliações
- Aula 02Documento25 páginasAula 02Kmi70 Krneir0Ainda não há avaliações
- Analise 01 20102Documento2 páginasAnalise 01 20102mpxisAinda não há avaliações
- Exercicios 09Documento5 páginasExercicios 09matheuslisarteAinda não há avaliações
- 2021 Ici 1S 03Documento4 páginas2021 Ici 1S 03Matheus IsoldiAinda não há avaliações
- LaplaceDocumento3 páginasLaplaceBenedito Nelson RovidaAinda não há avaliações
- Análise No Domínio Da Frequencia - Série de Fourier 15 04 2019Documento34 páginasAnálise No Domínio Da Frequencia - Série de Fourier 15 04 2019Vinicius Campos FantiAinda não há avaliações
- Controle Continuo 1 PDFDocumento18 páginasControle Continuo 1 PDFJeremias Ribeiro100% (1)
- AMIIIDocumento8 páginasAMIIIDenny RichAinda não há avaliações
- Algebra LinearDocumento32 páginasAlgebra LinearfpreisAinda não há avaliações
- Transfomada de LaplaceDocumento48 páginasTransfomada de LaplaceMateus OliveiraAinda não há avaliações
- V01a03 Calculo Fracionario AplicadoDocumento8 páginasV01a03 Calculo Fracionario AplicadoPaulo HenriqueAinda não há avaliações
- 1a Lista - Lista Transformada de LaplaceDocumento3 páginas1a Lista - Lista Transformada de LaplaceMatheus garciaAinda não há avaliações
- Capítulo 6 - Análise de Fourier - Ckt61Documento25 páginasCapítulo 6 - Análise de Fourier - Ckt61AntonioAinda não há avaliações
- 1130-Texto Do Artigo-2275-1-10-20171219Documento22 páginas1130-Texto Do Artigo-2275-1-10-20171219Roberto NascimentoAinda não há avaliações
- Tema4 - Transformadas (Laplace e Fourier)Documento67 páginasTema4 - Transformadas (Laplace e Fourier)Remerson AvelarAinda não há avaliações
- Exemplos Transformada de FourierDocumento17 páginasExemplos Transformada de FourierMuana BiavaAinda não há avaliações
- Presentacion y Cap 1Documento23 páginasPresentacion y Cap 1jvi alsAinda não há avaliações
- Transformada de LaplaceDocumento36 páginasTransformada de LaplaceSergio FernandesAinda não há avaliações
- DSL Aula 4Documento29 páginasDSL Aula 4Mariana MoreiraAinda não há avaliações
- Transformadas (Laplace e Fourier)Documento71 páginasTransformadas (Laplace e Fourier)Adriana BrunettiAinda não há avaliações
- LAB7 - Freq PrópriaDocumento5 páginasLAB7 - Freq PrópriaAllexsandro AraújoAinda não há avaliações
- Freq1 1819Documento7 páginasFreq1 1819João SilvaAinda não há avaliações
- AOL 5 - Equações DiferenciaisDocumento4 páginasAOL 5 - Equações DiferenciaisIzamara FerreiraAinda não há avaliações
- 1 Transf LaplaceDocumento9 páginas1 Transf LaplaceDenise PereiraAinda não há avaliações
- Oscilação Forçada Com Força Exterma Periodica PDFDocumento16 páginasOscilação Forçada Com Força Exterma Periodica PDFMauricio Henrique da SilvaAinda não há avaliações
- Apostila - Analise de Sistemas LinearesDocumento46 páginasApostila - Analise de Sistemas LinearesMendel Tavares PassosAinda não há avaliações
- Aula1 TecomDocumento31 páginasAula1 Tecomdksodaskk100% (1)
- Aula 02Documento15 páginasAula 02Mir4 BritoAinda não há avaliações
- Formulario MiDocumento4 páginasFormulario MiJoão SilvaAinda não há avaliações
- Exercicios - Transformada de Laplace PDFDocumento6 páginasExercicios - Transformada de Laplace PDFGenilson MBAinda não há avaliações
- Notas de Aula Met II Edson Cataldo 2018 Parte2Documento16 páginasNotas de Aula Met II Edson Cataldo 2018 Parte2Reinaldo BritoAinda não há avaliações
- Aula 9 - Revisão e LeakageDocumento30 páginasAula 9 - Revisão e LeakageslipcoutAinda não há avaliações
- Aula 4 - Excitação PeriódicaDocumento17 páginasAula 4 - Excitação PeriódicaslipcoutAinda não há avaliações
- DSL Aula 3Documento27 páginasDSL Aula 3Mariana MoreiraAinda não há avaliações
- Disciplinas PPG MATDocumento4 páginasDisciplinas PPG MATMauricio Oliverira do Nascimento nascimentoAinda não há avaliações
- Lista 2 Indução MatematicaDocumento2 páginasLista 2 Indução MatematicaIgor MartinsAinda não há avaliações
- Glossário MACS 11Documento3 páginasGlossário MACS 11RúbenAinda não há avaliações
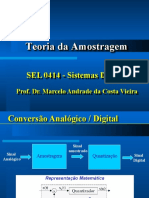
- Aula 20 - Teoria Da Amostragem PDFDocumento15 páginasAula 20 - Teoria Da Amostragem PDFMarcos NobreAinda não há avaliações
- Artigo ComplexidadeDocumento125 páginasArtigo ComplexidadeHelio FilhoAinda não há avaliações
- Linguagens Formais, Autômatos e Compiladores - Aula 1Documento66 páginasLinguagens Formais, Autômatos e Compiladores - Aula 1Pedro Lucas Teixeira DiasAinda não há avaliações
- Lista 4 Máquinas Térmicas e A Segunda Lei Da TermodinâmicaDocumento13 páginasLista 4 Máquinas Térmicas e A Segunda Lei Da Termodinâmicasatoru4nishidaAinda não há avaliações
- Programação: Instituto Politécnico Do Cávado E Do Ave Utesp: Robótica Colaborativa E Inteligência Industrial (Rcii) PLDocumento8 páginasProgramação: Instituto Politécnico Do Cávado E Do Ave Utesp: Robótica Colaborativa E Inteligência Industrial (Rcii) PLpereiramcfAinda não há avaliações
- Lista 1 - DEMA0312 - ESTATISTICA APLICADA 2022.1Documento2 páginasLista 1 - DEMA0312 - ESTATISTICA APLICADA 2022.1Melo JoseAinda não há avaliações
- Cap 2 - Resolucao de Problemas Por Meio de BuscasDocumento20 páginasCap 2 - Resolucao de Problemas Por Meio de BuscascarlosAinda não há avaliações
- Teste Do Capítulo 4 - Revisão Da TentativaDocumento7 páginasTeste Do Capítulo 4 - Revisão Da TentativaFernando Totoli Ferreira100% (1)
- Metodo Simplex Simples e CompletoDocumento8 páginasMetodo Simplex Simples e CompletoTomas MarceloAinda não há avaliações
- Lista15 2017 1 Cauchy EulerDocumento2 páginasLista15 2017 1 Cauchy EulerHeitor LucenaAinda não há avaliações
- Lista-Transformação LinearDocumento2 páginasLista-Transformação LinearLuísAinda não há avaliações
- Implementação de Otimização Colônia de Formigas PDFDocumento14 páginasImplementação de Otimização Colônia de Formigas PDFSenhor MAinda não há avaliações
- Apostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Documento145 páginasApostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Allan MoreiraAinda não há avaliações
- Ed - Grafosgrafos EstruDocumento6 páginasEd - Grafosgrafos EstruJoãoNetoAinda não há avaliações
- Equacoes 1ograu Ficha1Documento4 páginasEquacoes 1ograu Ficha1Carla SantosAinda não há avaliações
- Aula 5 - EconometriaDocumento27 páginasAula 5 - EconometriaAlejandro Pulgarin CueroAinda não há avaliações
- Aula de Revisão IiDocumento29 páginasAula de Revisão IiJessica Cristina PereiraAinda não há avaliações
- Método de Eliminação GaussianaDocumento5 páginasMétodo de Eliminação GaussianaEvelyn Micheli KleinAinda não há avaliações
- Conceitos E: Aprendizado ProfundoDocumento161 páginasConceitos E: Aprendizado Profundojairo silveiraAinda não há avaliações
- Prova Tentativa 3Documento5 páginasProva Tentativa 3Hallen Lopes Aires100% (1)
- Codificação Da Fonte e de CanalDocumento26 páginasCodificação Da Fonte e de CanalHenrique BeloAinda não há avaliações
- Lista de ExercíciosDocumento2 páginasLista de ExercíciosmileknzAinda não há avaliações